

分散反馈的类比
一个有助于理解分频反馈放大器电路的类比是机械杠杆,杠杆两端的相对运动代表输入和输出电压的变化,支点(枢轴点)代表接地点的位置,真实的或虚拟的。
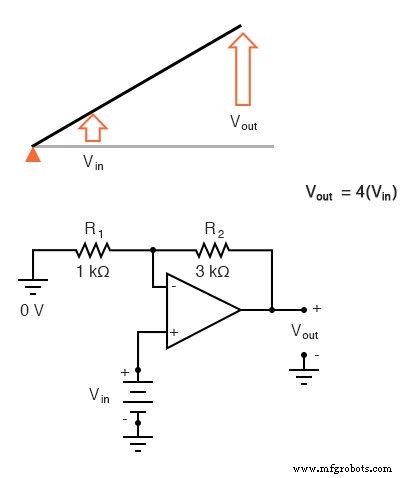
以下面的同相运算放大器电路为例。我们从前面的部分知道,同相放大器配置的电压增益永远不会小于 1 (1)。如果我们在放大器原理图旁边画一个杠杆图,支点和杠杆末端之间的距离代表电阻值,杠杆的运动将表示放大器输入和输出端电压的变化:
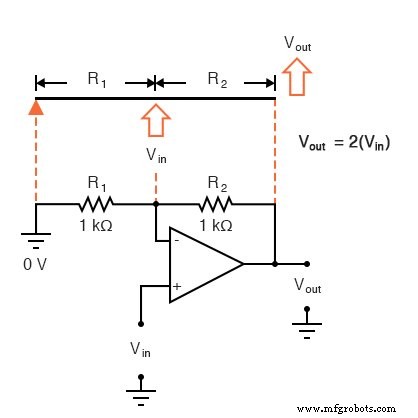
物理学家将这种类型的杠杆称为在支点和输出(负载)之间施加的输入力(作用力),是第三类 杠杆。它的特点是输出位移(运动)至少与输入位移一样大——“增益”至少为 1——并且方向相同。向该运算放大器电路施加正输入电压类似于将杠杆上的“输入”点向上移动:
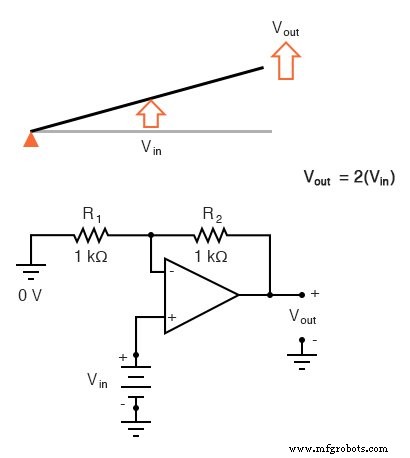
由于杠杆的位移放大特性,“输出”点会移动两次就“输入”点而言,方向相同。在电子电路中,输出电压将等于输入电压的两倍,极性相同。施加负输入电压类似于将控制杆从其电平“零”位置向下移动,从而导致放大的输出位移也是负值:
如果我们改变电阻比 R2/R1,我们就会改变运算放大器电路的增益。在杠杆方面,这意味着相对于支点和杠杆端移动输入点,这同样会改变机器的位移“增益”:
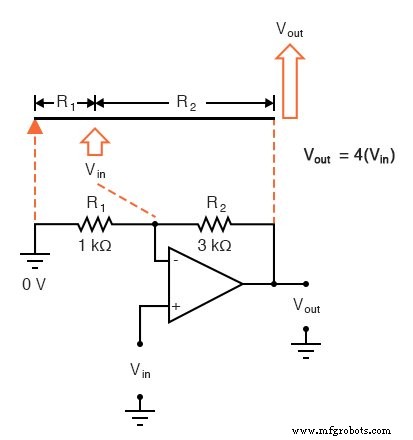
现在,任何输入信号都将被放大四倍而不是两倍:
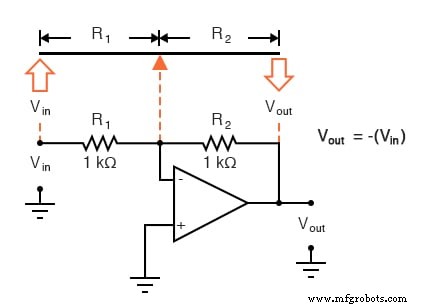
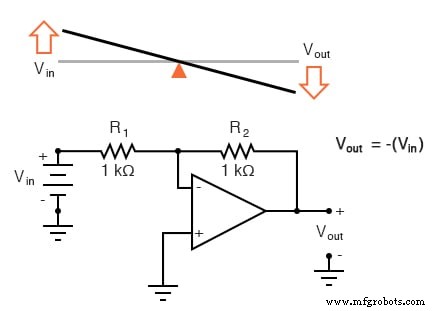
反相运算放大器电路也可以使用杠杆类比来建模。对于反相配置,反馈分压器的接地点是运算放大器的反相输入,输入在左侧,输出在右侧。这在机械上等同于一流 杠杆,其中输入力(作用力)位于输出(负载)支点的另一侧:
使用等值电阻器(支点两侧等长的杠杆),输出电压(位移)的大小将与输入电压(位移)相等,但极性相反(方向)。正输入导致负输出:
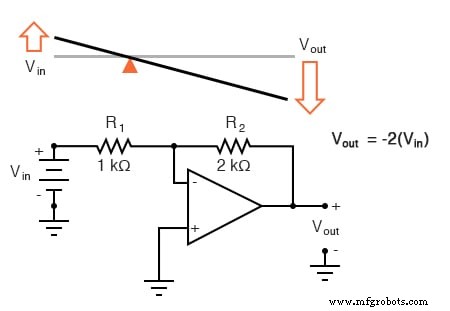
改变电阻比 R2/R1 会改变放大器电路的增益,就像改变杠杆上的支点位置会改变其机械位移“增益”一样。考虑以下示例,其中 R2 是 R1 的两倍:
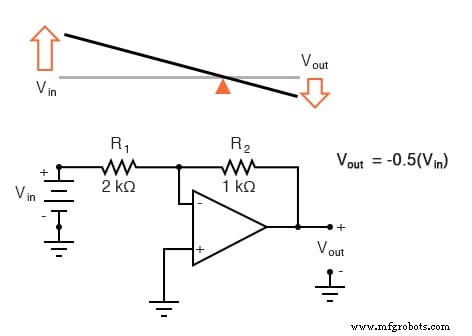
不过,对于反相放大器配置,小于 1 的增益是可能的,就像一流的杠杆。反转 R2 和 R1 值类似于将支点移动到杠杆上的互补位置:距离输出端的三分之一。在那里,输出位移将是输入位移的二分之一:
工业技术