

将加速度转换为来自 MPU6050 I2C 传感器的角度
组件和用品
 |
| × | 1 | |||
 |
| × | 1 |
应用和在线服务
 |
| |||
 |
|
关于这个项目
不久前我发布了一个教程 关于如何连接 MPU9250 加速度计、陀螺仪和罗盘传感器 Arduino Nano 并使用 Visuino 对其进行编程 发送数据包数据并将其显示在示波器和视觉仪器上。
加速度计 发送 X、Y 和 Z 加速度 势力。然而,我们经常需要将力转换为 X、Y、Z 3D 角度 确定3D 方向 的传感器。很少有人要求这样的教程,我终于有时间做了。
还有人问如何连接和使用MPU6050加速度计和陀螺仪传感器 ,所以我决定在教程中使用这个模块而不是更复杂和昂贵的 MPU9250 .
在本教程中,我将向您展示如何轻松连接MPU6050 加速度计和陀螺仪传感器 Arduino Nano , 并使用 Visuino 对其进行编程 转换加速度 成 3D X、Y、Z 角 .
第 1 步:组件
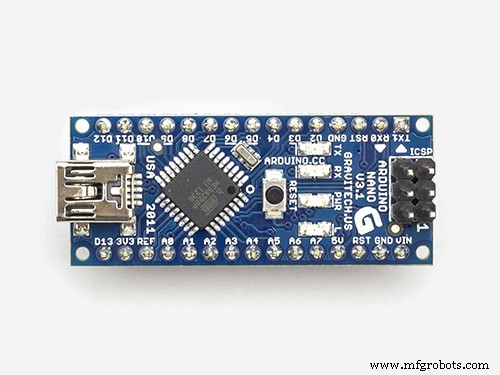
- 一个 Arduino 兼容板(我使用 Arduino Nano,因为我有一个,但任何其他都可以)
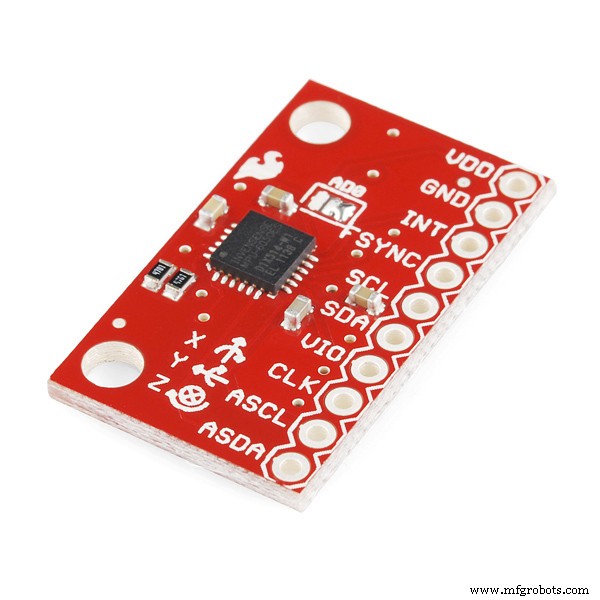
- 一个 MPU6050 加速度陀螺仪传感器模块
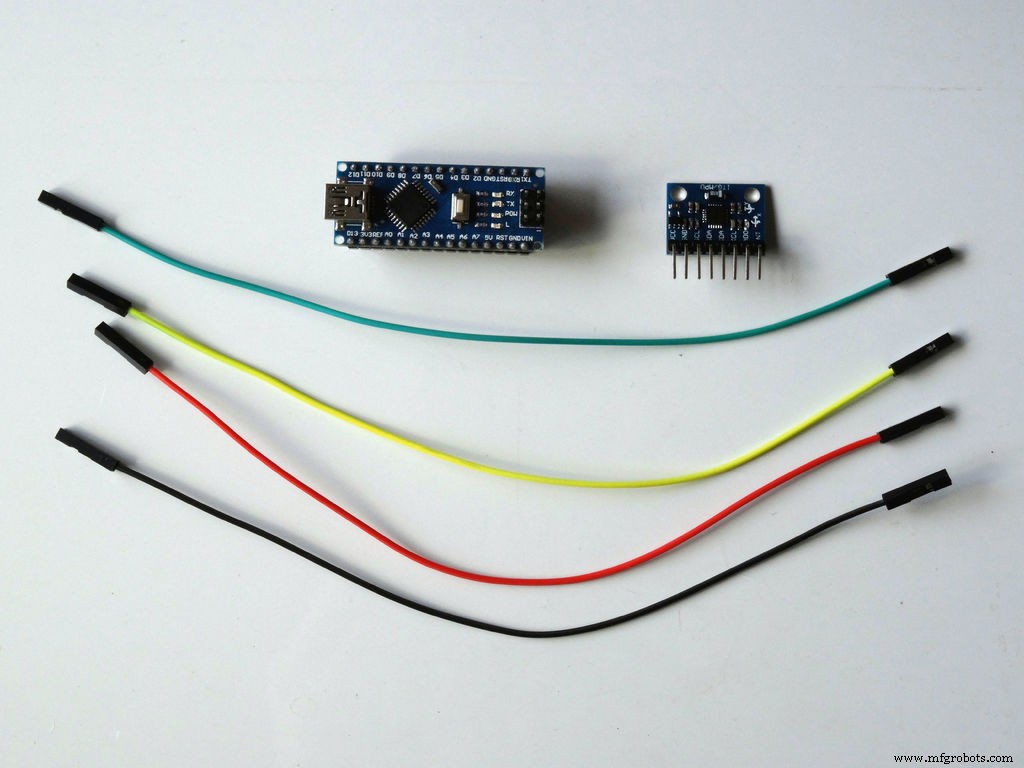
- 4 女-女 跳线
第 2 步:将 MPU6050 加速度计和陀螺仪连接到 Arduino
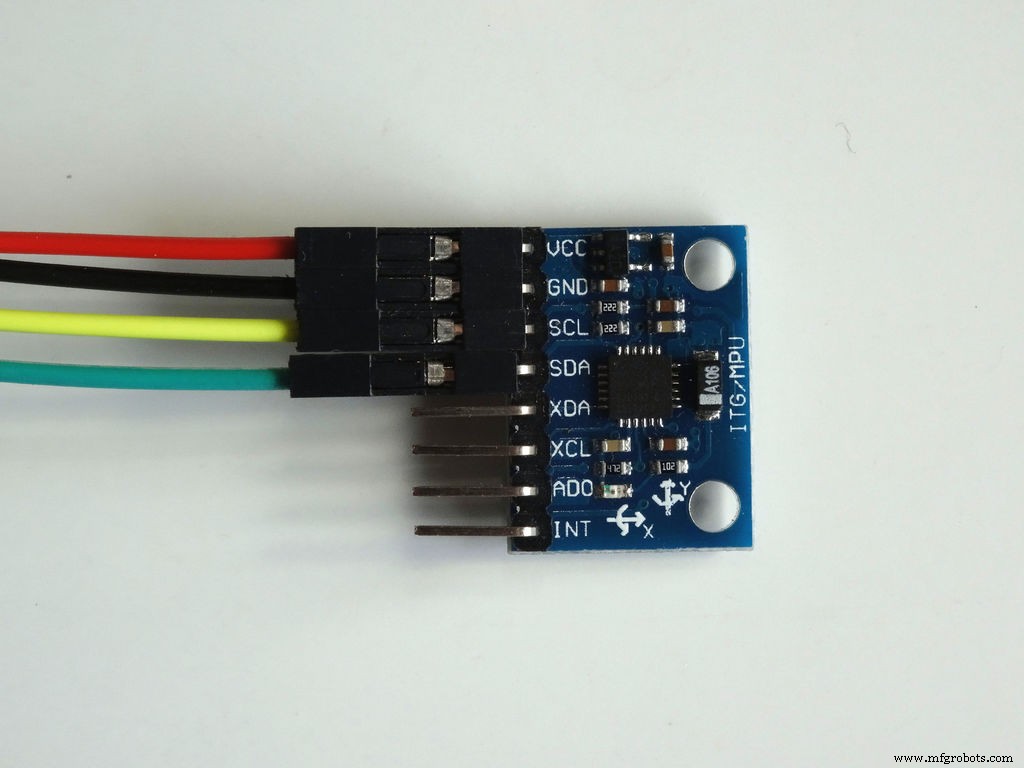
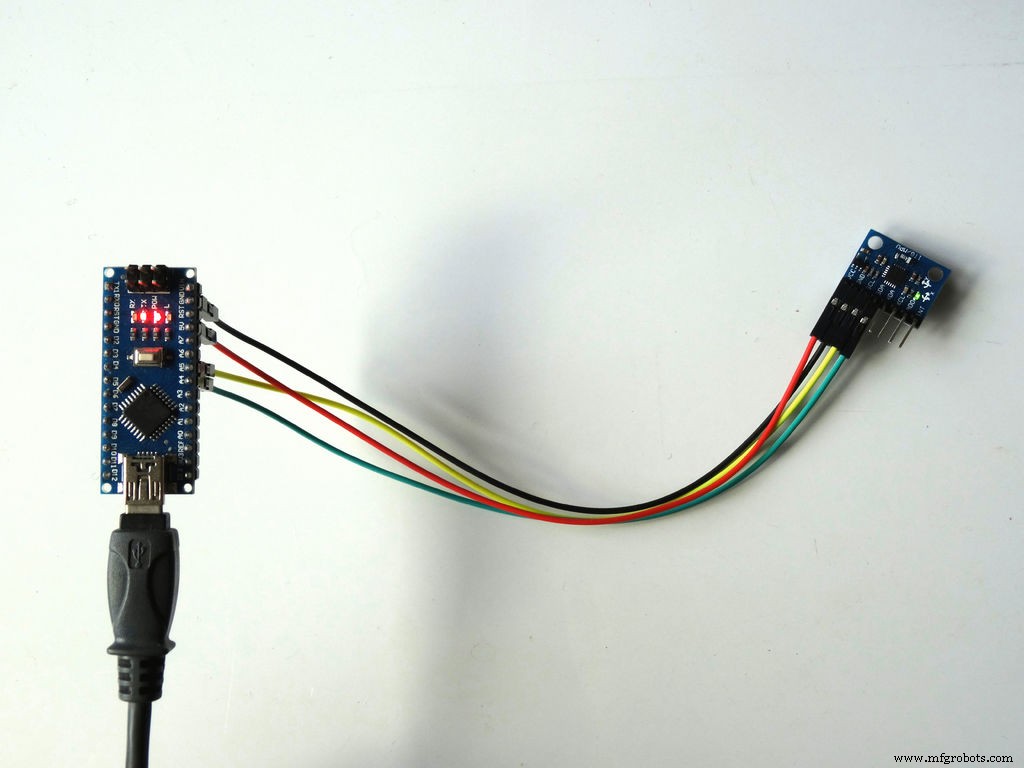
- 连接5V VCC 电源 (红线 ), 地面 (黑线 ), SCL (黄线 ) 和 SDA (绿线 ) 到 MPU6050 模块 (图一 )
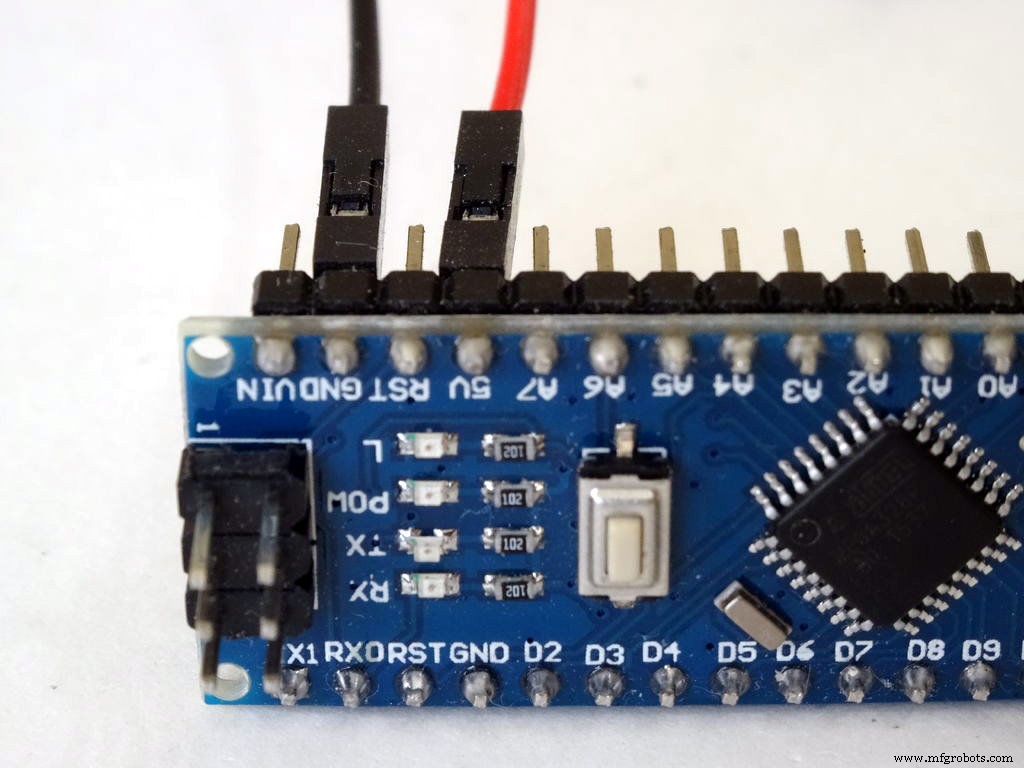
- 连接地线的另一端 (黑线 ) 到 地面 Arduino Nano 的引脚 板(图 2 )
- 连接5V VCC 电源线的另一端 (红线 ) 到 5V Arduino Nano 的电源引脚 板(图 2 )
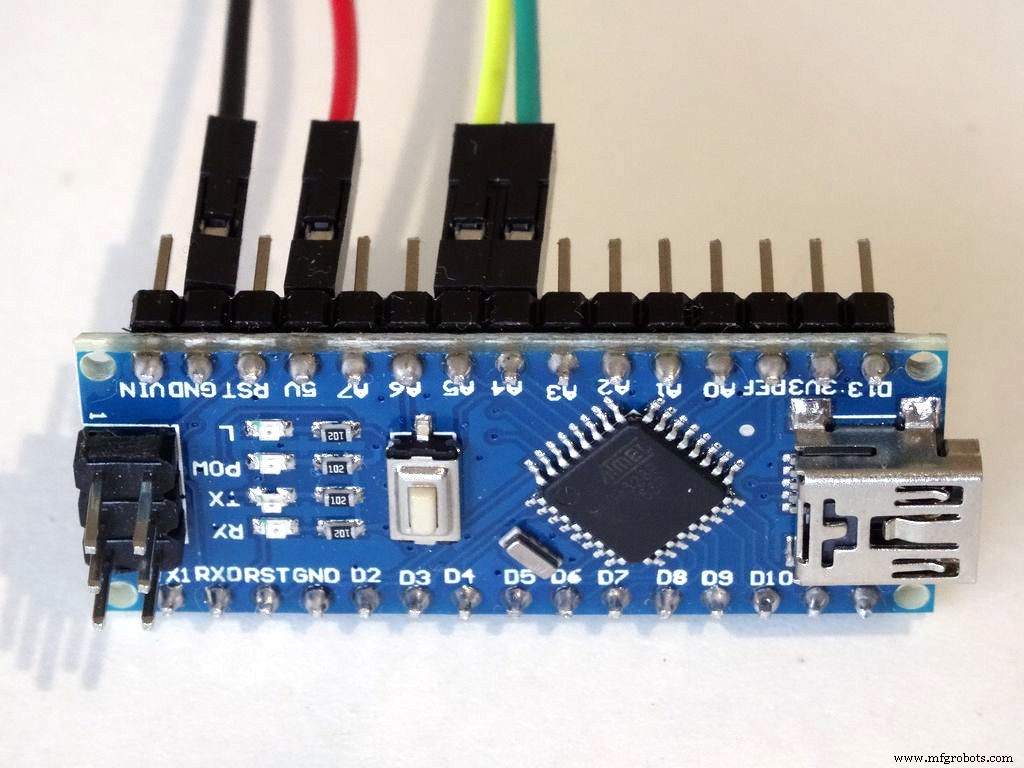
- 连接SDA 线的另一端 (绿线 ) 到 SDA/模拟引脚 4 Arduino Nano 板(图 3 )
- 连接SCL 线的另一端 (黄线 ) 到 SCL/模拟引脚 5 Arduino Nano 板(图 3 )
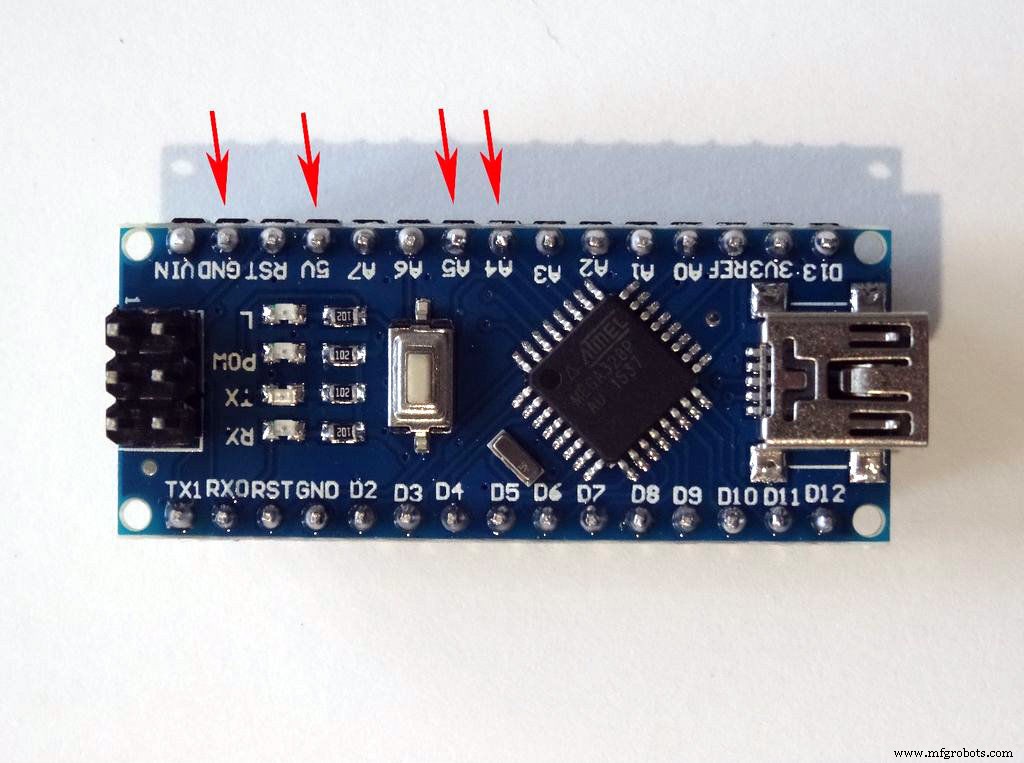
- 图 4 显示地面的位置 , 5V 电源,SDA/模拟引脚 4 , 和 SCL/模拟引脚 5 ,Arduino Nano 的引脚
第三步:启动Visuino,选择Arduino Board Type
要开始对 Arduino 进行编程,您需要拥有 Arduino IDE 从这里安装:http://www.arduino.cc/。
请确保您安装的是 1.6.7 或更高版本,否则本教程将无法运行!
Visuino :https://www.visuino.com 也需要安装。
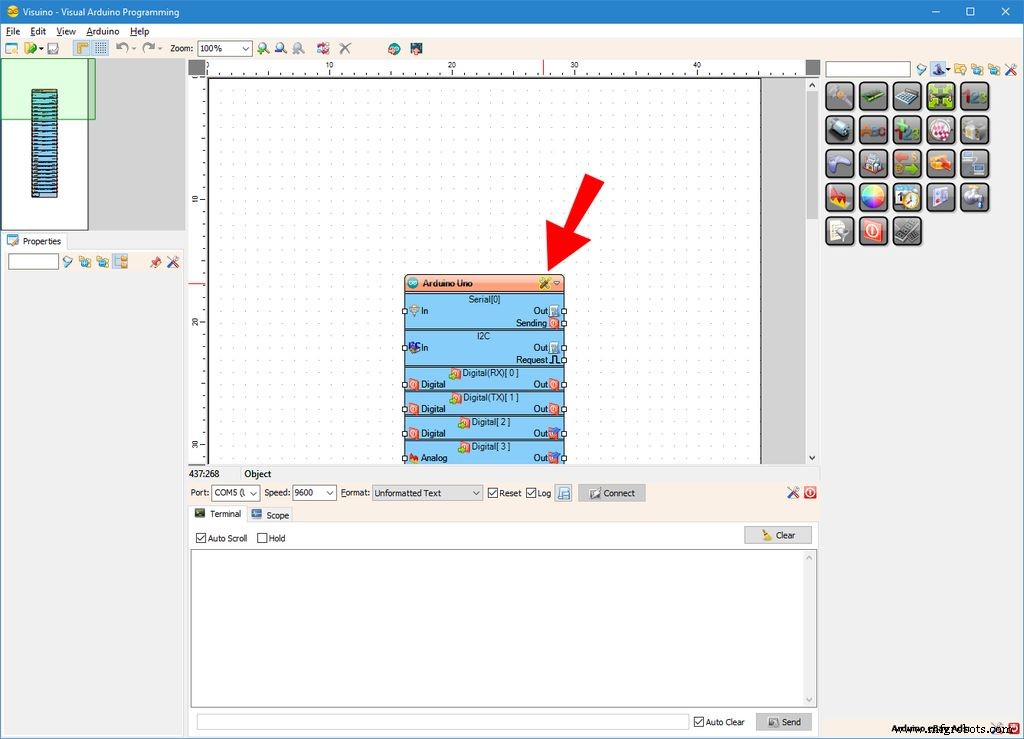
- 启动 Visuino 如第一张图
- 点击“工具 “Arduino 上的按钮 组件(图 1 ) 在 Visuino 中
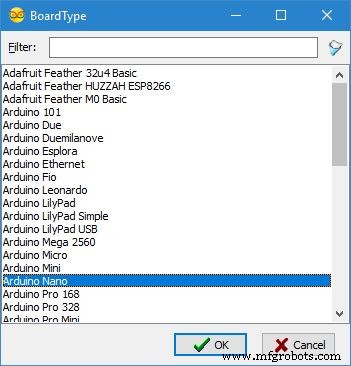
- 出现对话框时,选择 Arduino Nano 如图2所示
第 4 步:在 Visuino 中:添加并连接 MPU9650 和加速度到角度组件
首先我们需要添加组件来控制MPU6050 Sensor,并将X, Y, Z Acceleration转换为3D X, Y, Z Angle:
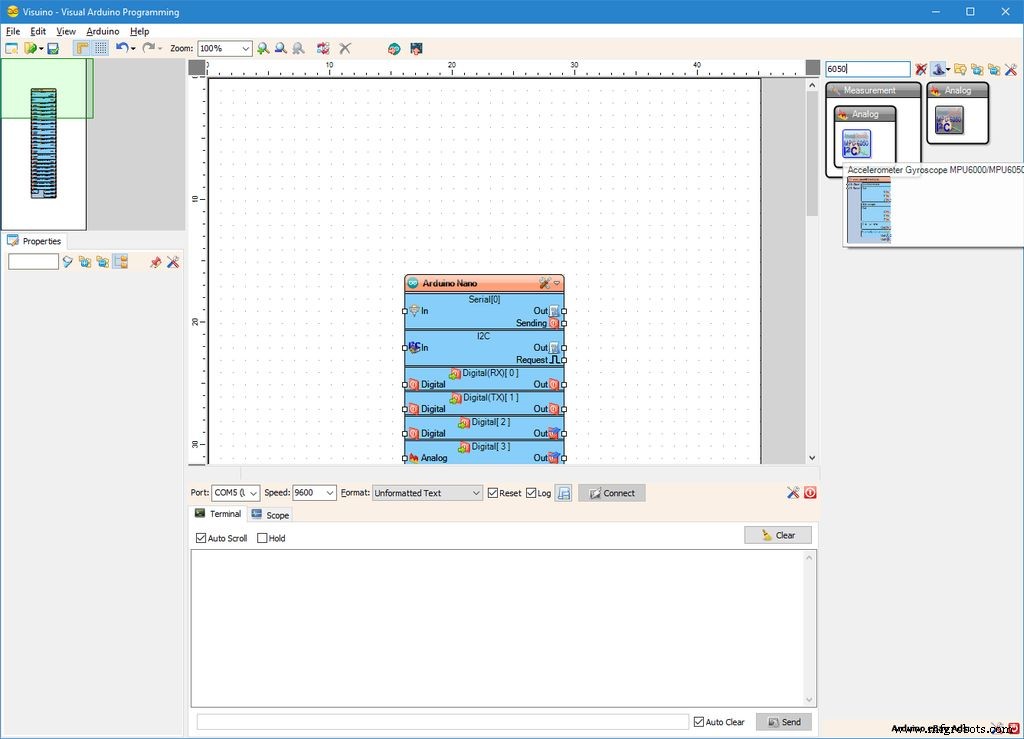
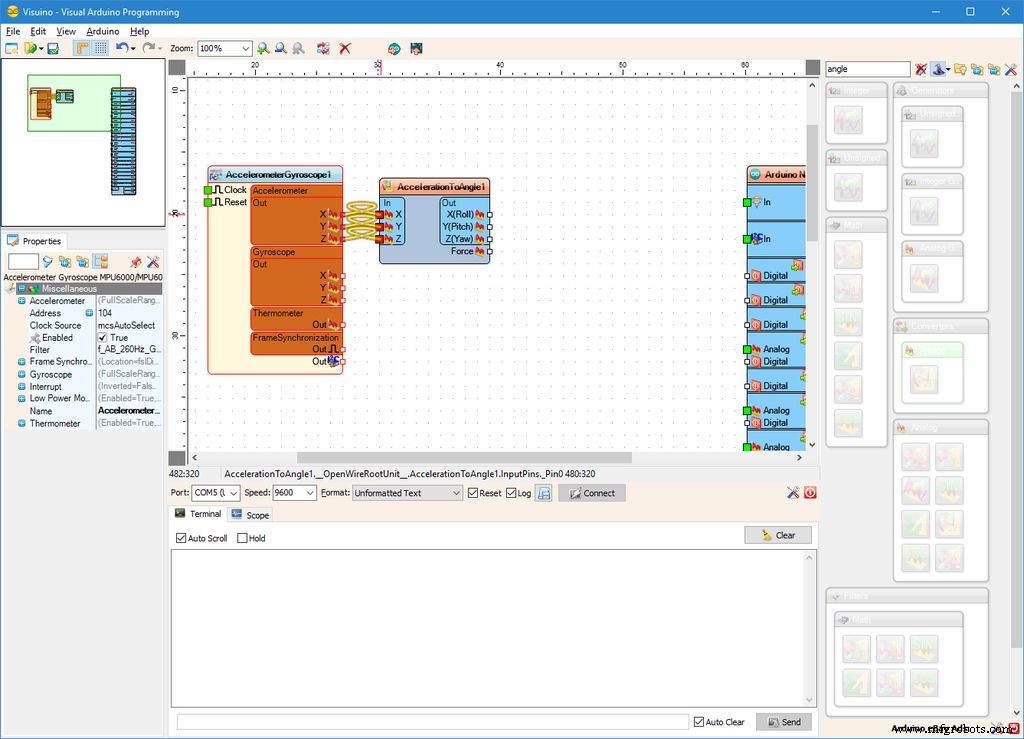
- 输入“6050 “在组件工具箱的过滤器框中,然后选择“加速度计陀螺仪 MPU6000/MPU6050 I2C " 组件(图 1 ),并将其放在设计区域中(图片 2 )
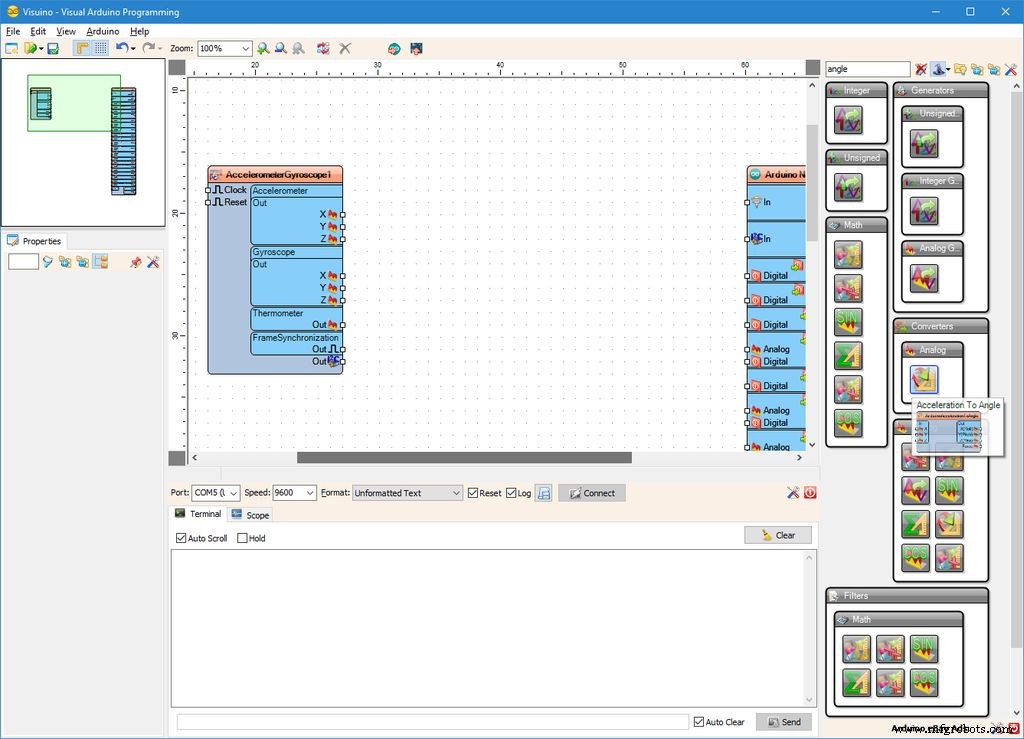
- 输入“角度 “在组件工具箱的过滤器框中,然后选择“加速度到角度 " 组件(图 2 ),并将其放在设计区域中(图 3 )
- 点击“出 “加速度计的”框 " 包含 AccelerometerGyroscope1 的 X、Y、X 加速引脚的盒子 组件立即开始连接所有输出引脚(图片 3 )
- 将鼠标移到“X "In 的输入引脚 " AccelerationToAngle1 的框 零件。 Visuino 将自动展开电线,以便它们正确连接到其余的引脚(图片 3 )
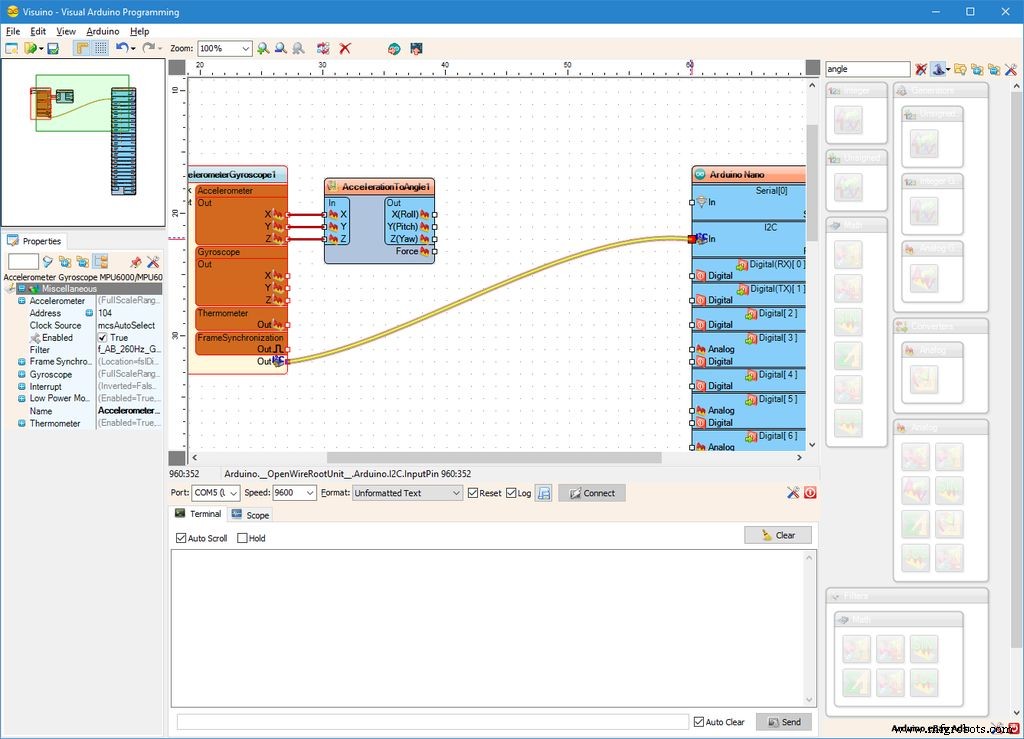
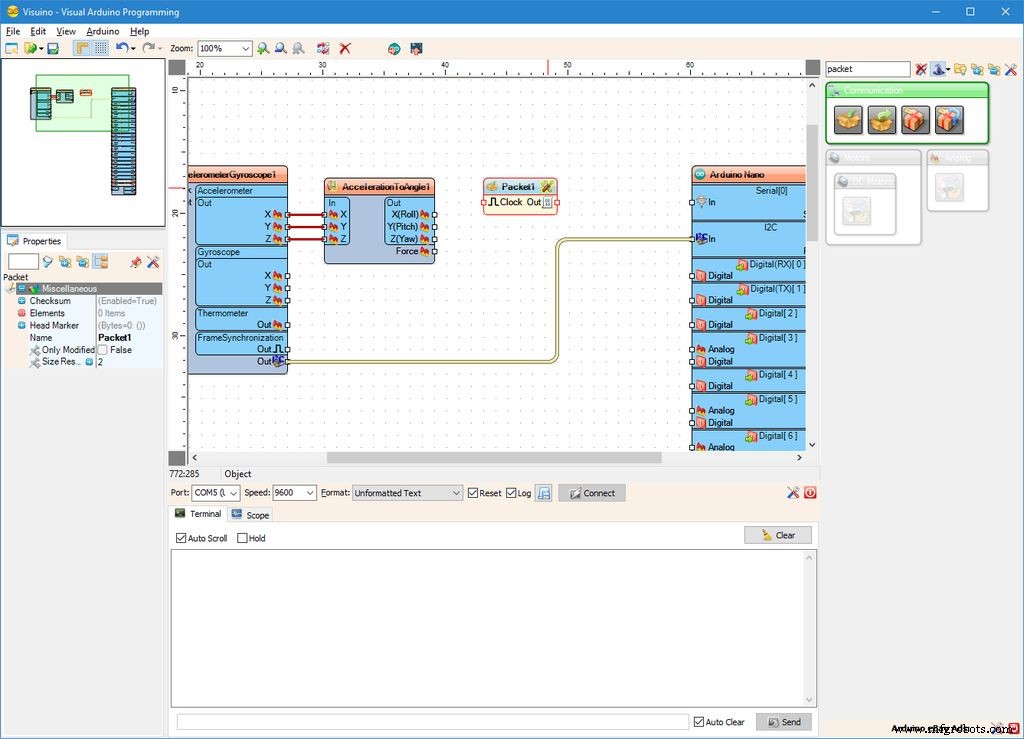
- 连接“输出 "AccelerometerGyroscope1 的引脚 组件到“In " I2C 的引脚 Arduino 的频道 组件(图 4 )
第 5 步:在 Visuino 中:添加数据包组件和 3 个二进制模拟元素并连接它们
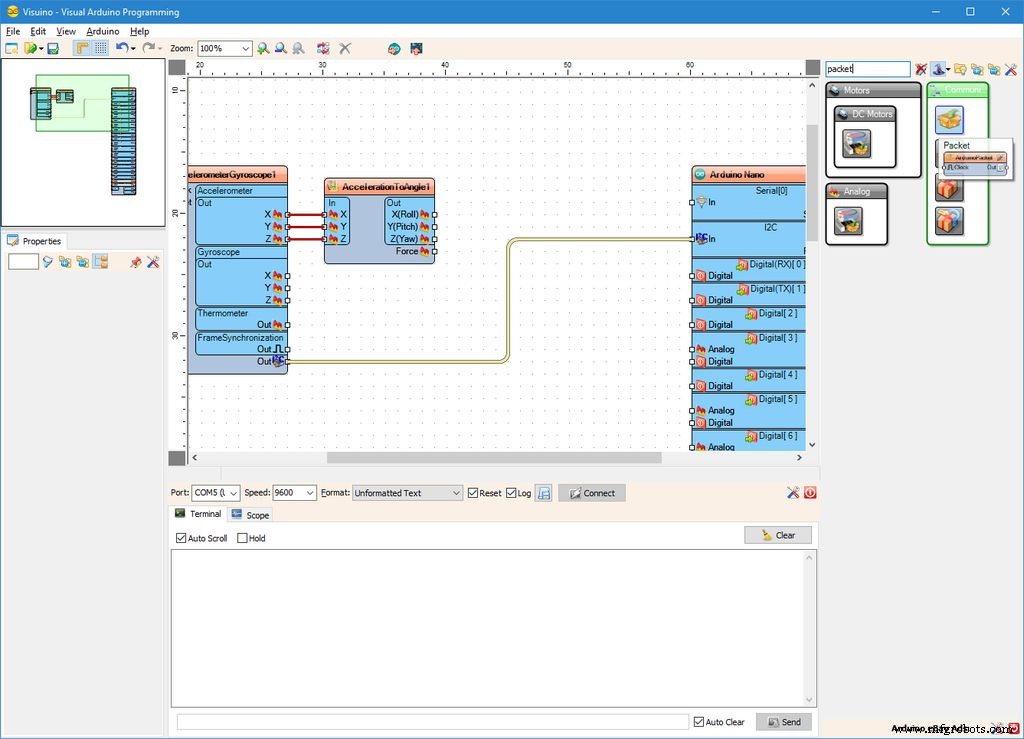
要通过 Arduino 的串行端口发送所有通道数据,我们可以使用 Packet 组件将通道打包在一起,并在 Visuino 的范围和仪表中显示它们 :
- 输入“数据包 “在组件工具箱的过滤器框中,然后选择“正弦模拟发生器”组件(图片 1 ),并将其放在设计区域
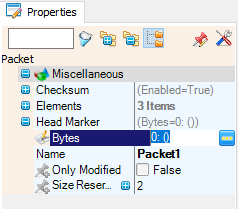
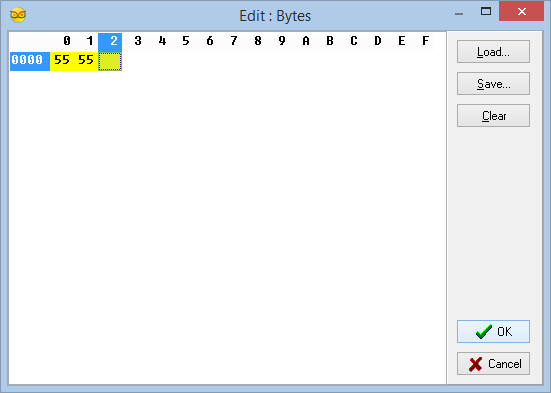
- 在对象检查器中展开“头部标记 “财产(图片2 )
- 在对象检查器中单击“... " 按钮(图片 2 )
- 在字节编辑器中输入一些数字,例如 55 55 (图 3 )
- 点击确定按钮 确认并关闭编辑器
第 6 步:在 Visuino 中:将 3 个二进制模拟元素添加到数据包组件并连接它们
要通过 Arduino 的串行端口发送所有通道数据,我们可以使用 Packet 组件将通道打包在一起,并在 Visuino 的范围和仪表中显示它们 :
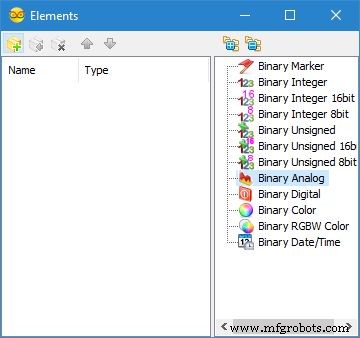
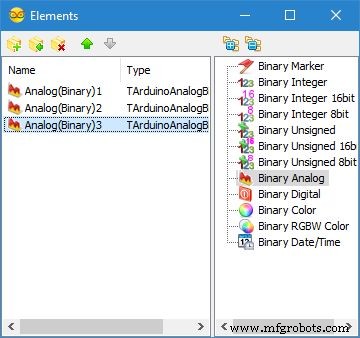
- 点击“工具 "Packet1 的按钮 组件(图 1 )
- 在“元素 " 编辑器选择“二进制模拟 ”元素,然后点击“”按钮3次 (图二 ) 添加 3 模拟元件(图 3 )
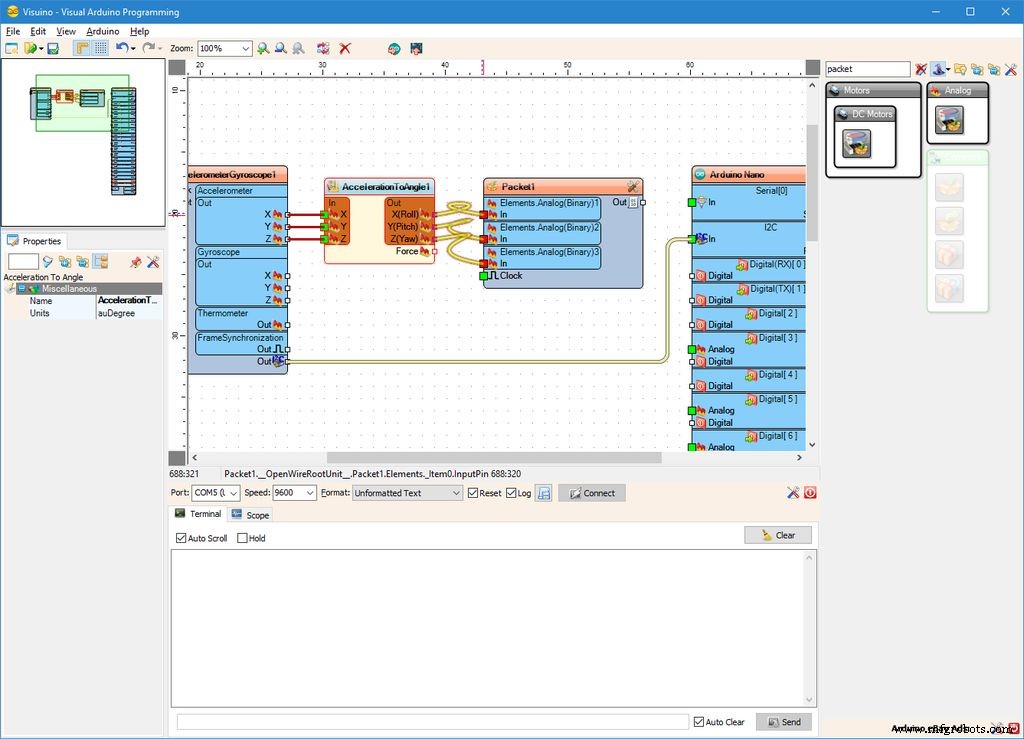
- 点击“出 “加速度计的”框 " 包含 AccelerationToAngle1 引脚的框 组件立即开始连接所有输出引脚(图片 4 )
- 将鼠标移到“In “Elements.Analog(Binary)1 的引脚 " Packet1 的元素 零件。 Visuino 将自动展开电线,以便它们正确连接到其余的引脚(图片 4 )
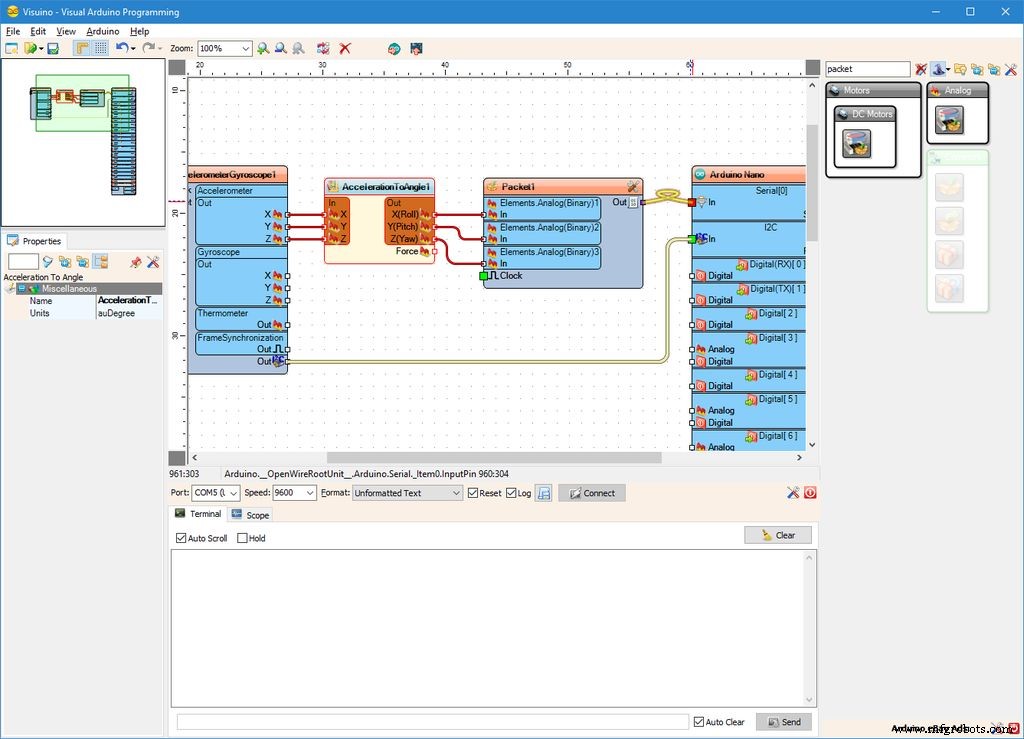
- 连接“输出 " Packet1 的输出引脚 组件到“In "Serial[0] 的输入引脚 ”“Arduino”频道 "组件(图 5 )
第 6 步:生成、编译和上传 Arduino 代码


- 在 Visuino 中 , 按 F9 或点击图片1上显示的按钮 生成 Arduino 代码,并打开 Arduino IDE
- 在 Arduino IDE 中 ,点击上传 按钮,编译和上传代码(图片2 )
第 7 步:然后播放...
您可以看到连接并运行的 MPU6050 加速度计和陀螺仪传感器 在图片1 .
- 在 Visuino 中 选择串行端口,然后单击“格式: " 下拉框,然后选择 Packet1 (图二 )
- 点击“连接 " 按钮(图片 2 )
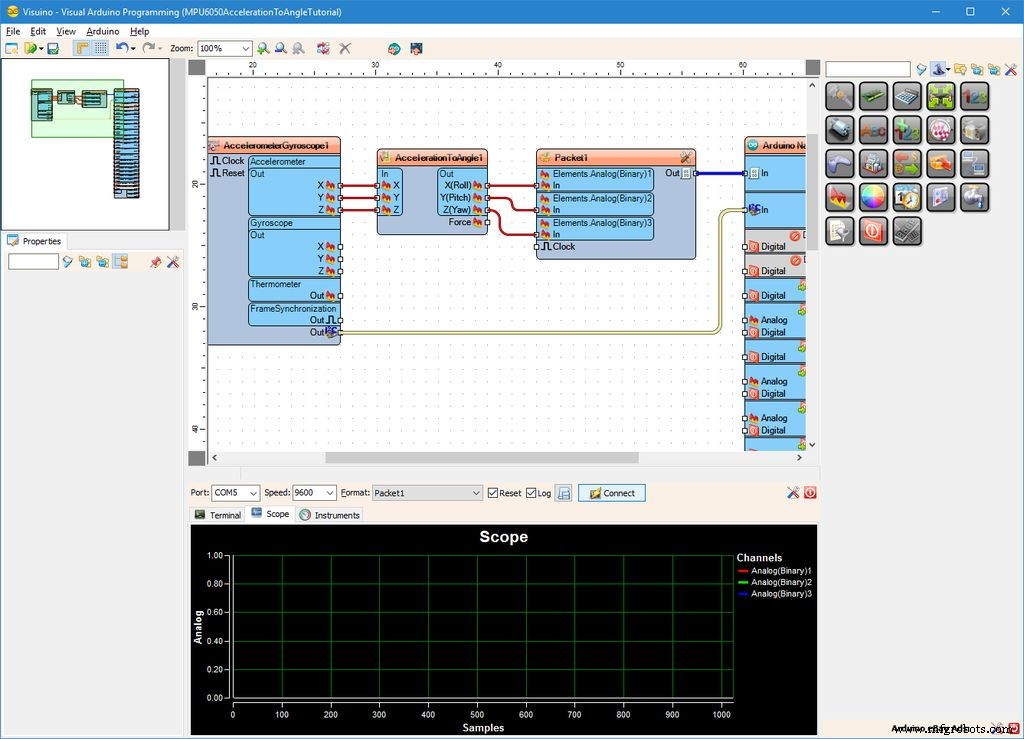
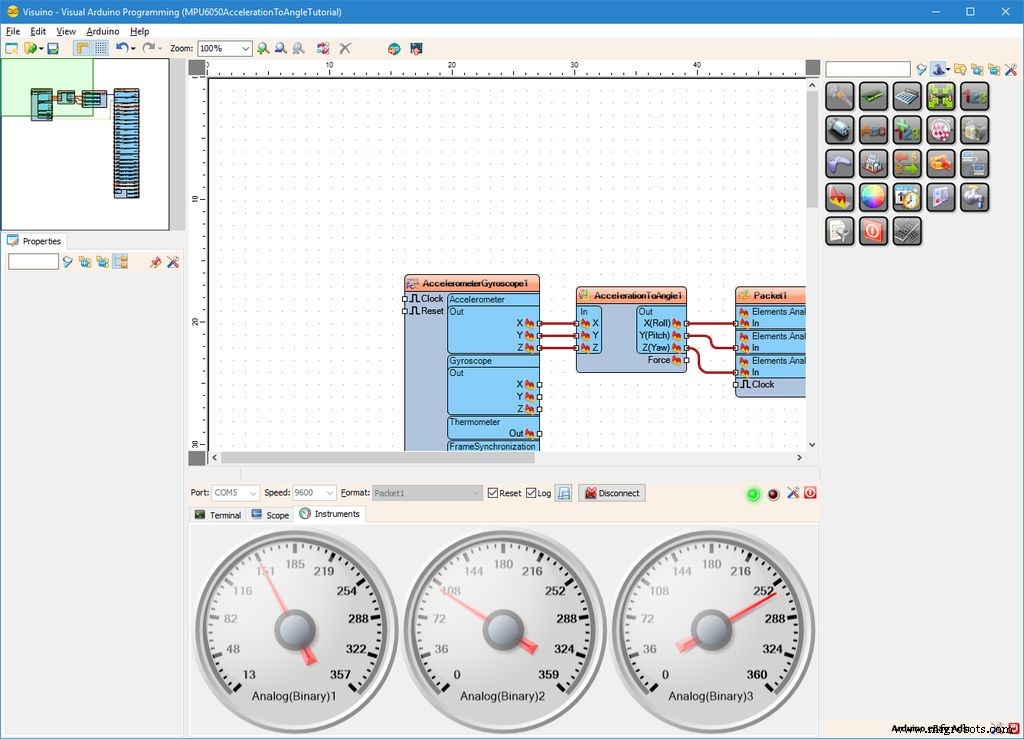
- 如果您选择“范围 " 选项卡,您将看到 Scope 绘制 X,Y,Z 角度 随着时间的推移(图片 3 )
- 如果您选择“乐器 " 选项卡,您将看到 仪表 显示相同的信息(图 4 )
您可以在 视频 上看到传感器的运行情况 .
恭喜! 您已经创建了一个 Visuino 将加速度转换为角度的项目 来自 MPU6050 加速度计和陀螺仪传感器 .
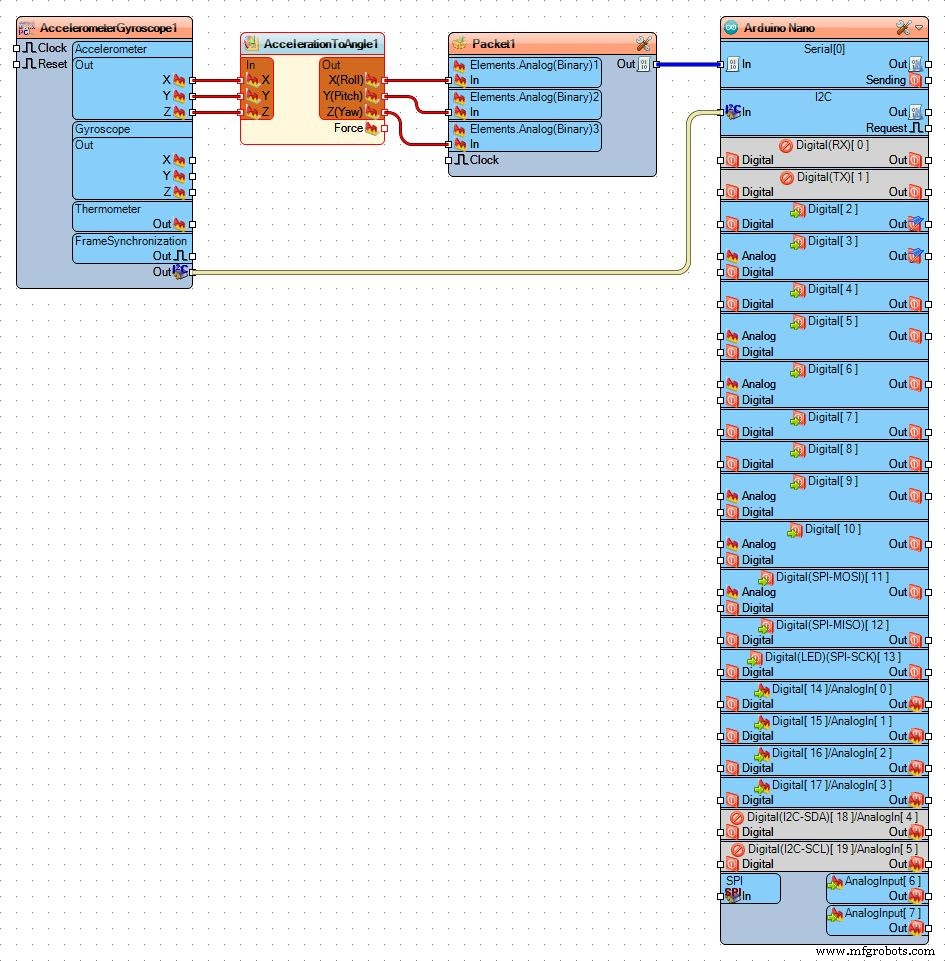
在图片5 你可以看到完整的Visuino 示意图。
还附上了 Visuino 我为本教程创建的项目。您可以在 Visuino 中下载并打开它 :https://www.visuino.com
代码
- MPU6050AccelerationToAngle教程
MPU6050AccelerationToAngleTutorialArduino
完整的 Visuino 项目无预览(仅限下载)。
制造工艺