

百万像素光子计数相机技术
想象一个设计用于以每秒 24,000 帧的单光子分辨率捕获图像的相机。由于电子快门的开启时间仅为 3.8ns,并且可以与持续时间仅为几皮秒的快速激光脉冲同步,人们可以真正看到光在空间中传播。有了这种能力,量子视觉、鬼成像、亚散粒噪声成像、量子 LiDAR 和量子蒸馏等新应用将得以开启。
这些应用的共同点是需要单光子检测和高定时分辨率、低噪声和高灵敏度。这款新相机具备所有这些功能,此外,它还可以同时处理一百万像素,因此可以显着加快捕捉速度,并可能加快重建速度。这些像素的核心是一个单光子雪崩二极管 (SPAD),它执行光子检测,生成数字脉冲。这个脉冲可以被计数或时间戳,从而给出相机的光子计数和时间分辨特性。
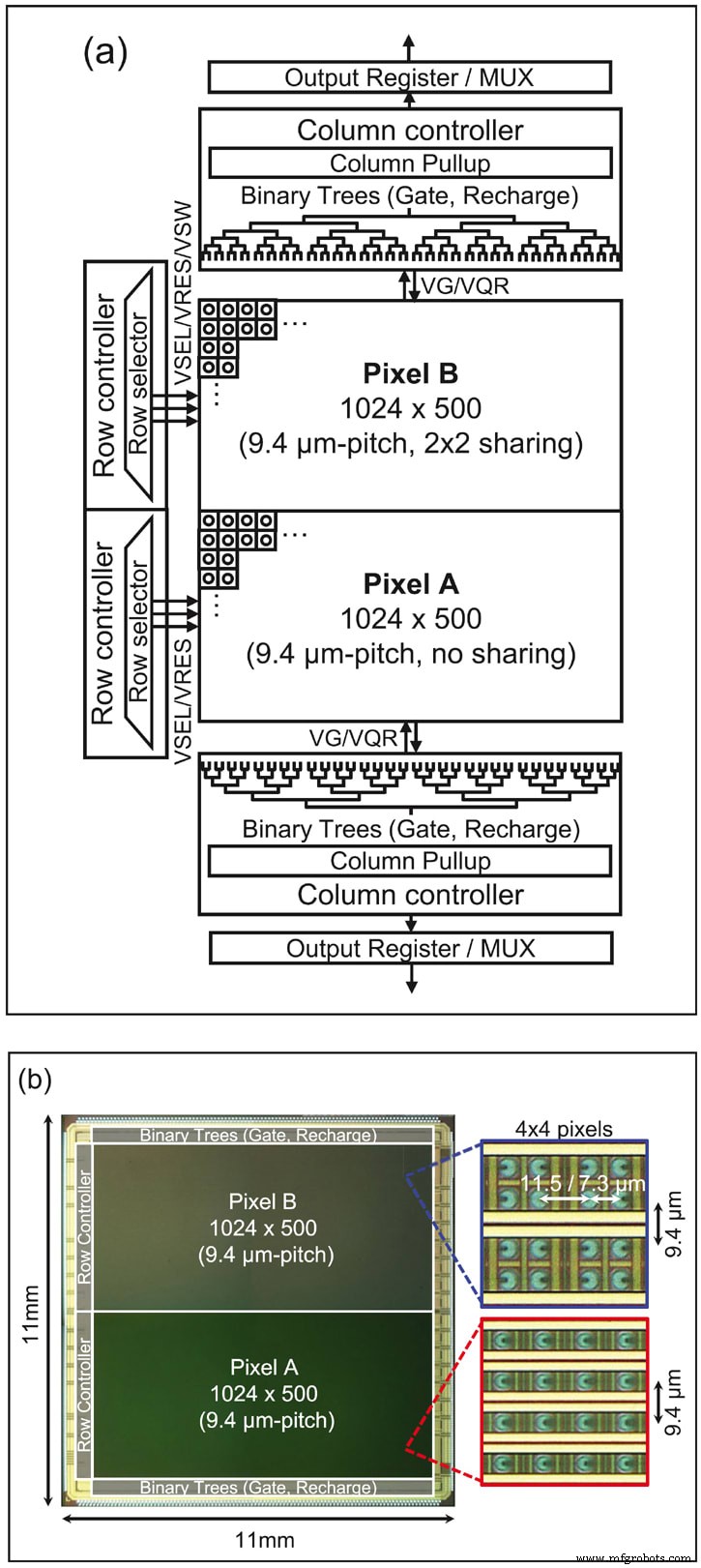
在同行评审期刊 Optica 上发表的一篇论文中,我们展示了第一台基于 SPAD 像素的 1-Mpixel 相机。像素间距为 9.4 μm,采用 7T(每个像素 7 个晶体管)或 5.75T 架构。相机芯片的显微照片如图1(b)所示。相机框图如图1(a)所示;它包括一个用于控制快门的双二叉树,精度约为 100ps,位置可调,步长为 36ps。这使得人们能够通过测量光脉冲在离开激光器并被物体反射时的飞行时间来重建 3D 图像。它还使人们能够捕捉飞行中的光,从而在实验室中展示有趣的相对论效应。
该芯片作为强度图像传感器进行了测试,具有像素级高达 14 位的标准图表(图 2(a))。图 3(a) 和 (b) 显示了 2D 和彩色编码的 3D 图片,通过以 40 MHz 脉冲并在半分辨率图像传感器上捕获的 637 nm 激光照射场景获得。长度为 3.8 ns 的栅极窗口以 36 ps 的步长从 0.6 ns 移动到 13.2 ns,以获得作为栅极位置函数的完整光子强度分布。

此测量中的 LSB 距离对应于 5.4 mm。通过检测每个像素的平滑强度分布的上升沿位置来重建深度信息,对应于反射激光脉冲的到达时间。通过从测量的到达时间分布中减去独立测量的时序偏斜分布来补偿阵列上的门时序偏斜。在图 3(b) 中,红色表示离 SPAD 相机的距离更高,而蓝色对应于更远的距离。本次测量的最大深度范围设置为2m,但可以通过降低激光重复频率和增加浇口步长将其扩展到数十米。
精细的门扫描间距和长曝光用于实现高深度精度,该测量的数据采集时间为几十秒。这比间接飞行时间等其他测距方法要长得多,但可以通过增加栅极扫描间距、减小扫描范围和增加激光功率以减少曝光时间来轻松减少。此外,通过实现片上微透镜来提高灵敏度,有望进一步改善。
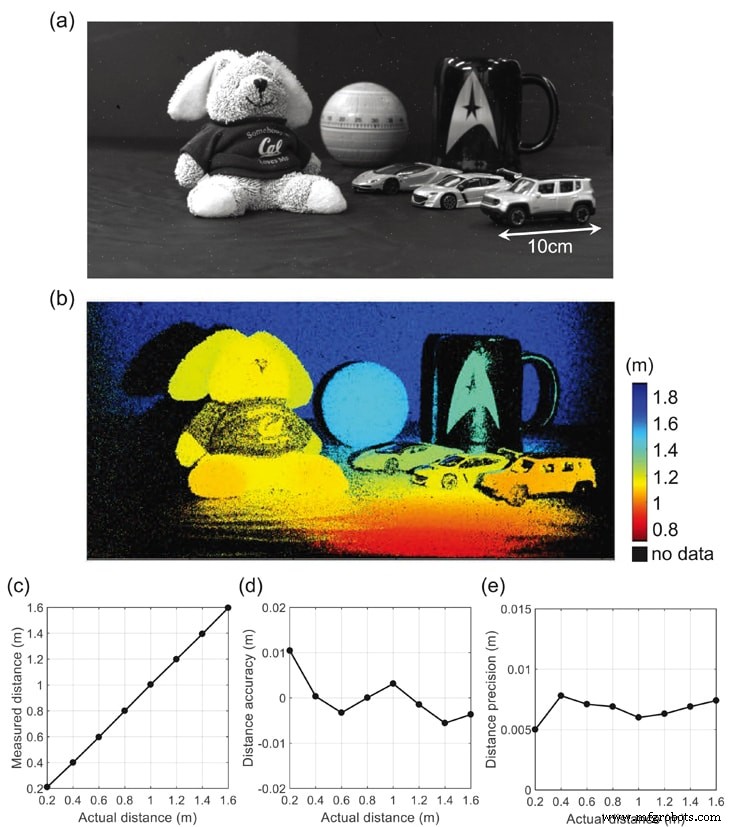
图 3(c) 显示了作为实际物距函数的测量距离。在图 3(c)、(d) 和 (e) 中,使用覆盖有白纸(反射率在 60% 左右)的平面物体来评估测量的距离、准确度和精度。在图 3(c) 中,通过取阵列中心 20×20 像素上的单个像素距离的平均值来提取测量距离。在 0.2 到 1.6m 的测量范围内观察到与实际距离非常吻合。在图 3(d) 中,距离精度计算为平均测量距离减去实际距离。对于测量的距离范围,精度始终优于 1 厘米。在图 3(e) 中,距离精度被用作阵列中心 20×20 像素上的单个像素距离的标准偏差。 1.6m以内的所有测量点精度均优于7.8 mm (rms)。
多目标检测已经通过对时间照明或曝光模式进行编码进行了实验证明,这涉及到恢复 3D 图像的大量计算成本。时间门控飞行时间传感器通过紧凑的像素电路和不太复杂的计算提供了一种替代的、可扩展的解决方案。
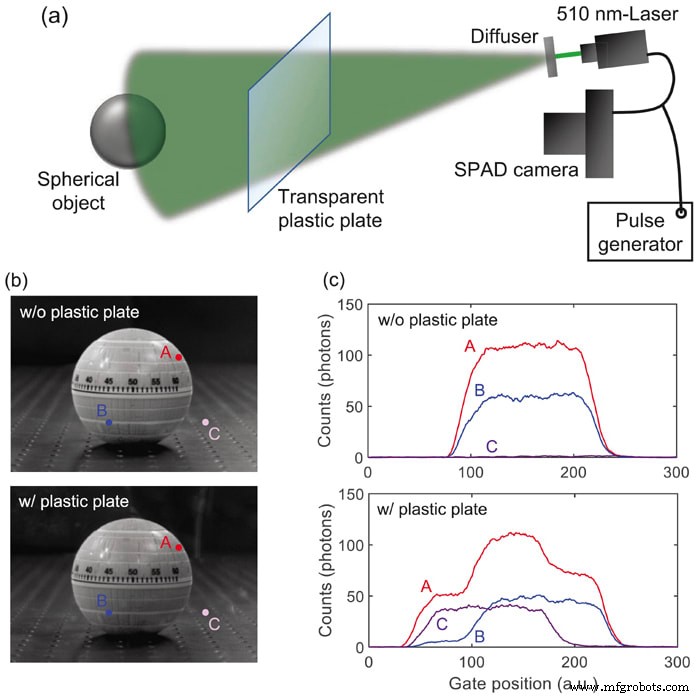
图 4(a) 显示了实验装置:以 40 MHz 脉冲的 510 nm 激光束由扩散器扩散并用于照亮球形目标。 SPAD相机与激光触发信号同步,在相机和物体之间插入一块透明塑料板。相机到塑料板和物体的距离分别为0.45m和0.75m。图 4(b) 显示了插入和未插入塑料板的室内照明下的 2D 强度图像。由于该板几乎是透明的,因此这两种情况在二维图像中没有观察到显着差异。
三个代表点(A、B 和 C)的测量时间门控曲线绘制在图 4(c)中。在没有板的情况下,点 A 和 B 的时间选通曲线仅显示单个平滑矩形函数波形,其上升沿围绕选通位置 100(位置的一步对应于 36 ps)。对于 C 点,在测量的门位置范围内,光子计数保持接近于零,表明在该像素处未检测到反射物体。
相比之下,对于塑料板,A 点的轮廓在栅极位置 40 和 100 周围显示两步上升沿。假设光子计数的测量轮廓是单个平滑矩形函数和反射光子强度分布的卷积,两步轮廓令人信服地证明了塑料板和球形物体的双重反射。在点 B 观察到类似的行为,其中浇口位置 40 周围的第一个上升沿的斜率比点 A 的斜率更平缓。点 C 处的轮廓仅显示浇口位置 40 周围的单个上升沿,对应于塑料的反射盘子。浇口位置40附近上升沿的斜率在不同点之间的变化是由塑料板表面的非均匀反射引起的。
结果证明了时间门控SPAD相机执行空间重叠多目标检测的能力。请注意,所提出的方案可以应用于检测多于两个反射峰。在后处理中对虚拟门窗进行更精细的扫描可以系统地检测多个峰。两个相邻反射材料之间的最小可分辨距离从根本上受到门窗轮廓的有限上升或下降时间的限制,对应于该 SPAD 传感器中的 5-10 cm。
总之,首次报道了 1 兆像素时间门控 SPAD 图像传感器。在 SPAD 研究中,实现百万像素 SPAD 传感器被认为是十多年来最重要的里程碑之一。该传感器应用于高动态范围2D成像和高时空分辨率3D成像。据我们所知,单光子时间门控方案的空间重叠多目标检测已首次通过实验证明。
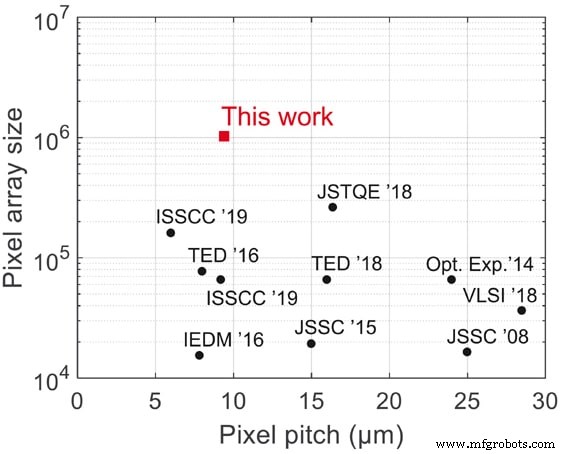
图 5 显示了 SPAD 像素间距和阵列大小的最新比较。传感器的阵列尺寸最大,几乎是最先进传感器的 4 倍,而像素间距是最小的之一。由于其高分辨率 2D 和 3D 成像能力,所提出的传感器将可用于各种工业应用,例如安全、汽车、机器人、生物医学和科学应用,包括量子成像和超高速成像。
阅读科学期刊 Optica 上关于该技术的完整报告 .
本文由瑞士洛桑联邦理工学院教授 Edoardo Charbon 撰写。如需更多信息,请访问此处 .
传感器