

CNC 运动控制系统简化
我最近被要求向我的家人解释用于 CNC 机床的运动控制系统。意识到这个人根本没有制造背景——当然也没有任何如此复杂和技术性的经验——我不得不将我的解释与一些常见而简单的事情联系起来,让他们轻松地想象这个类比……就像开车一辆车。

虽然这个话题本质上是非常复杂和技术性的,但我认为这个类比在简化主题方面做得很好,但仍然让有兴趣的人对正在发生的事情有足够的基本了解。显然,这样一门先进的技术学科可能需要大学整个学期的大部分时间才能获得透彻的理解,但对于我们这些简单的人来说,我认为驾驶类比会很好用。但是,在我们开始之前,我们需要打下一些基础。您需要了解从我们大脑中开始的命令如何通过 CNC 控制并最终表现为机器线性轴的运动的基础知识。
让我们将我们的零件程序(会话或 G 代码)视为命令列表。这些命令由 CNC 控制器组织,并为机器的每个单独轴排列成不同的类别,然后传递到相应的轴。一旦伺服驱动器接收到特定轴的命令,该命令就会分解为一个简单的电压要求,以按照命令的顺序移动轴 - 然后将该电压施加到电机……导致电机旋转,从而导致轴移动。当轴移动时,其当前位置由安装在电机末端的编码器或沿轴长度安装的玻璃刻度持续监控。该监控设备向伺服驱动器提供反馈,因此可以在必要时更改电压命令……电压越高意味着电机旋转得更快,如果落后,轴就会赶上;电压越低意味着电机转速越慢,因此如果轴开始运行超出指令运动太远,则会减慢轴的速度。
现在,让我们应用我们的驾驶类比。首先,我们需要遵循一些命令……假设我们到达最终目的地的路线是我们的刀具路径,沿途的限速标志将作为我们的指令进给率。您的大脑是 CNC 控制器,您的肌肉将充当伺服驱动器,您的四肢可以成为控制您的轴的伺服电机。我们将使用我们的眼睛和速度计进行反馈。现在,因为生活中没有什么是完美或精确的,我们需要对我们的指挥位置留出一些可接受的公差……所以假设道路的整个宽度是我们的定位公差,只要我们留在柏油路,我们一切顺利!
在第一个类比中,想象自己停在一条废弃的高速公路上,在一个偏僻的地方,道路在你面前像箭头一样笔直。你被命令沿着路中间的双黄线行驶一英里,这条路的限速是每小时 100 英里。首先,你的大脑告诉你脚部的肌肉对油门施加压力,汽车开始移动。要沿着黄线行驶,您的大脑将使用来自您眼睛的视觉反馈,控制您手臂的肌肉,并使车辆保持直线行驶 - 根据从速度计接收到的反馈,您的大脑还必须控制脚踝的肌肉,以增加或减少施加在加速器上的压力,以保持 100 英里/小时的指令速度。位置公差在这里真的不是问题。好的,我意识到这非常简化,但现在你看到了我的驾驶类比可以如何应用,我们可以更进一步。
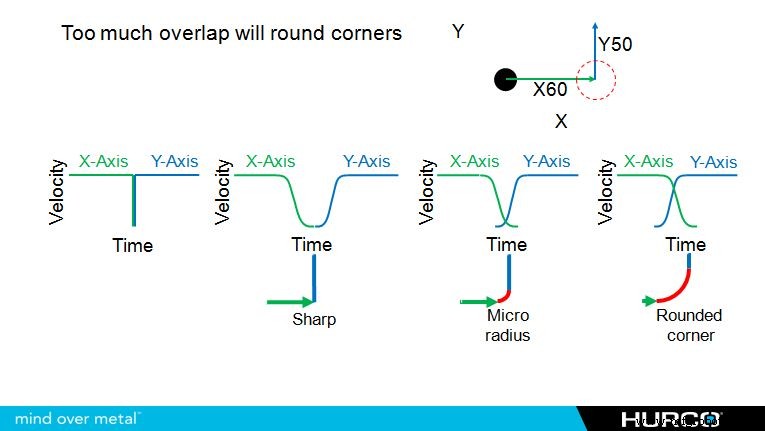
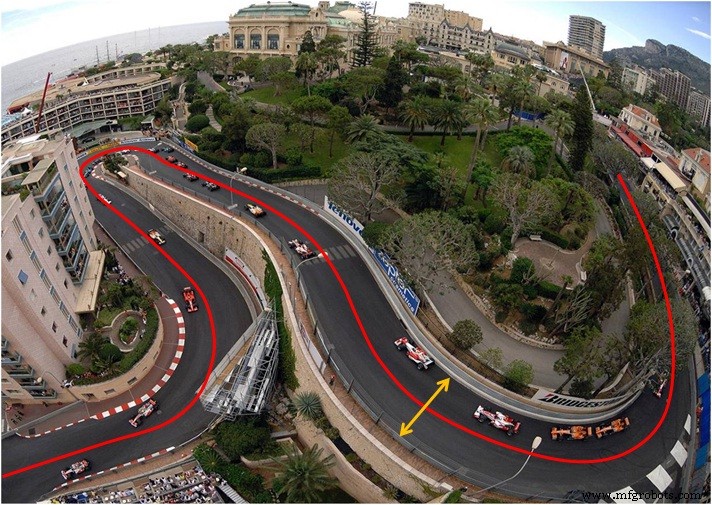
使用与上述相同的命令(沿着双黄线行驶一英里,以 100 英里/小时的速度,并使用道路的整个宽度作为我们可接受的公差)让我们继续进行类比二……我们坐在中间我们将在下一英里遇到的最后一条笔直的道路。摆在我们面前的道路多风多山,这次在我们的命令范围内操作将更具挑战性。我们加速到 100 英里/小时的指令速度,但很快就遇到了第一个障碍……向右转了整整 90 度。意识到我们无法成功导航这个转弯,并且仍然保持我们当前的速度,我们不得不降低我们的速度。我们必须在转弯时找到一条平滑的轨迹,这将使我们能够保持尽可能接近我们指令速度的速度,但不会导致我们偏离道路。根据从我们的视觉设备收到的反馈,我们的大脑发送命令来控制必要的运动并调整我们的速度和轨迹路径以成功导航转弯。
然后,几乎立即,我们发现自己面临着更具挑战性的障碍……“S”形曲线,上半场是上坡,下半场是下坡。虽然这种情况的处理方式很像上面简单的 90 度转弯 - 控制我们的速度和轨迹,以尽可能平稳和最快的路径,同时仍然保持安全在路上 - 我们现在也必须对海拔的变化做出反应......在转弯的第一段攀爬时增加加速器的压力,但在最后一段降低压力,并在必要时应用刹车,这样当重力开始接管时,我们不会超过我们的指令速度 100 英里/小时。对于我们遇到的每一个障碍,这种行动和反应都将继续下去,直到我们到达或最终目的地……程序结束!
在谈论运动控制时,我们还必须讨论一种称为“块前瞻”的东西,它通常通过控件能够提前处理的块数来衡量——使控件能够更好地为即将到来的障碍做好准备。在我们的驾驶类比中,块前瞻可能被显示为安装在仪表板上的 LCD 显示器,它可以为我们提供轨道地图,因此我们可能能够改变当前障碍物的轨迹,所以我们将处于更好的位置以顺利执行未来的障碍。显然,刀具路径变得越复杂,为保持最平滑和最快的路线到达终点线,可能需要更多可用的前瞻。尽管每个机床制造商都有类似的方法来处理块前瞻,但有些人比其他人更有效。
Hurco 的 WinMax 控制有一种叫做 UltiMotion 的东西……一种基于软件的专利运动控制系统,提供可变块前瞻;这允许控制系统在必要时查看多达 10,000 个块,并且可以将循环时间减少多达 30% - 特别是在需要更多前瞻的更复杂的刀具路径上。显然,在更简单的刀具路径上——就像我们上面前两个类比中的那些——与最后一个场景相比,控件需要的前瞻要少得多……因此,更多的控件 RAM 内存被释放,并且可以更好地用于其他场景事物。不具备这种“适应”当前控件需求的独特能力的控件,无法重新利用任何可用的控件 RAM 内存,也无法从这种可变性中受益。

数控机床