

比较汽车访问自动寻址方案
使用蓝牙低功耗的汽车门禁系统通常有一个中央模块和多个卫星模块/节点,它们通过控制器局域网 (CAN) 总线或本地互连网络 (LIN) 总线进行通信。卫星模块物理分布在汽车周围,以提高蓝牙通信范围。
系统设计人员希望通过设计一块具有相同软件的 PCB 来提高卫星模块的可制造性,以便在汽车中的安装与蓝牙节点的位置无关。然而,由于每个卫星节点在安装时的硬件和软件是相同的,因此需要一种方案,让中央模块在模块安装到车辆后为每个卫星节点分配唯一的CAN或LIN地址。
一种选择是使用专用的 LIN 菊花链网络在制造过程中将 CAN ID 共享给模块。在这种情况下,中央模块使用 LIN 接口对每个卫星模块进行寻址,但在车辆的整个生命周期内不会再次使用 LIN 接口。另一种选择是用分立式实现替代专用 LIN 总线,从而降低物料清单 (BOM) 成本。为了进一步降低系统成本,真正的无线选项只使用蓝牙,无需额外硬件,重新利用节点上已有的蓝牙基础设施来处理模块。
最终,无线方法减少了 BOM、系统布线以及库存、管理和组装现在不需要的组件的成本。在更深入地研究无线方法之前,本文先概述了有线自动寻址方法。
汽车门禁系统一直趋向于使用蓝牙低功耗实现电话即钥匙或其他数字钥匙功能。这些系统的操作类似于被动进入被动启动系统,但增加了使用驾驶员智能手机作为钥匙的能力,从而取代了传统的遥控钥匙。 Phone-as-a-key 兼容的车辆采用一个中央模块或智能钥匙模块和多个卫星模块,每个模块都能够从智能手机或遥控钥匙接收蓝牙信号。除了中央模块(图 1)之外,一个典型的系统可能有 6 到 12 个卫星模块。
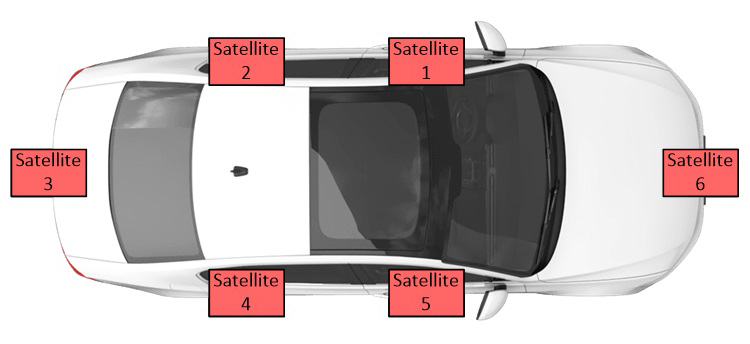
图 1。此图显示了蓝牙卫星模块可以在整个汽车中的分布位置。
消费者需要手机即钥匙系统才能确定手机或钥匙卡何时处于车辆的解锁区域内。为了估计智能手机或遥控钥匙的位置,系统会对各种卫星模块接收到的信号进行三角测量,这些卫星模块分布在整个汽车的乘客侧门、门槛板、行李箱或保险杠等位置。
车辆的中央模块使用通信接口(例如 CAN 总线或 LIN 总线)与卫星模块通信。中央模块使用从每个卫星模块接收到的数据对智能手机或遥控钥匙的位置进行三角测量,然后确定是否允许进入汽车。图2说明了如何使用CAN总线作为中央模块和卫星模块之间的主要通信网络。
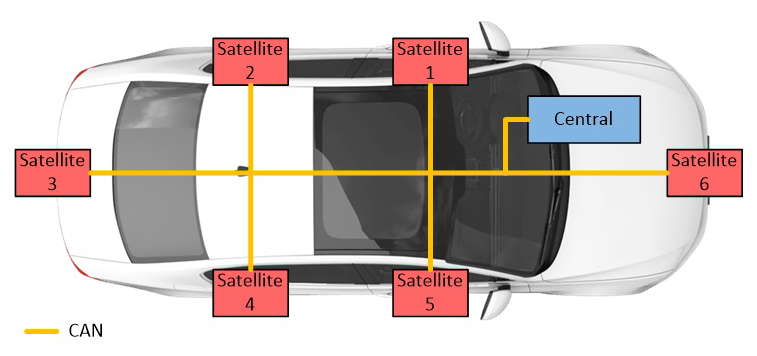
图 2. 可以假设 CAN 总线是蓝牙汽车接入系统网络中中央模块和卫星模块之间的主要通信网络。
卫星模块的 CAN 总线地址使中央模块能够确定它从哪个卫星模块接收数据。中央模块将唯一的 CAN ID 或地址与每个特定卫星模块的位置相关联,这由整个系统设计决定。与其为每个卫星模块都有一个唯一的 PCB,总线地址是硬连线或硬编码的,但让单个 PCB 设计为所有卫星模块运行单一版本的固件将是有利的。这避免了六个、八个或更多几乎相同单元的制造和库存管理所涉及的额外成本和物流问题。单一设计还可以通过在车辆的任何位置安装相同的卫星模块来简化制造。
由于卫星节点的硬件和软件在安装时都是相同的且未寻址,因此需要一种方案,使中央模块在安装到汽车上后为每个卫星模块分配唯一的CAN ID或地址。
有线自动寻址:LIN菊花链方法
目前,为汽车中的卫星模块分配 CAN 总线地址是使用单独的通信网络(如 LIN)完成的,卫星以菊花链形式连接在总线上(图 3)。中央模块通过 LIN 总线向第一个卫星节点发送 CAN 总线网络地址。完成后,第一个卫星节点将使用 LIN 总线将从中央模块接收到的下一个地址发送到第二个卫星。这个过程一直持续到所有卫星都收到了它们唯一的 CAN 地址。
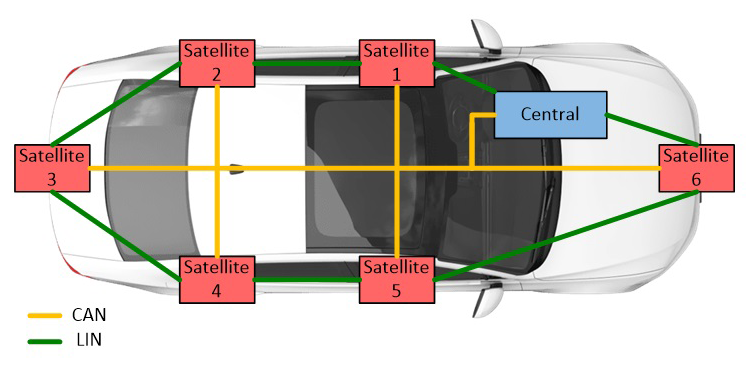
图 3. 这种自动寻址架构使用 LIN 菊花链向卫星发送唯一的 CAN ID。
该方案要求每个模块有两个 LIN 物理层 (PHY),一个用于接收数据,另一个用于传输数据。 LIN PHY 仅在自动寻址操作期间使用。一旦对卫星进行编程,所有标准数据通信都通过汽车访问 CAN 总线完成。一辆典型的汽车可能有 6 到 12 个卫星模块,这意味着它需要 14 到 26 个 LIN PHY 来支持一次性自动寻址操作,从而显着增加了车辆的 PCB BOM、系统成本和复杂性。
有线自动寻址:单线方式
德州仪器 (TI) 开发了一种替代方法,通过用 MOSFET 和几个电阻器替换专用的自动寻址 LIN PHY 来降低每个模块的 BOM 成本。该方案的自动寻址软件的主要区别在于,所有卫星模块都针对蓝牙芯片系统 (SoC) 进行编程,以忽略 CAN 总线,直到在 P_IN 线上接收到唤醒信号。图 4 显示了框图。
点击查看大图
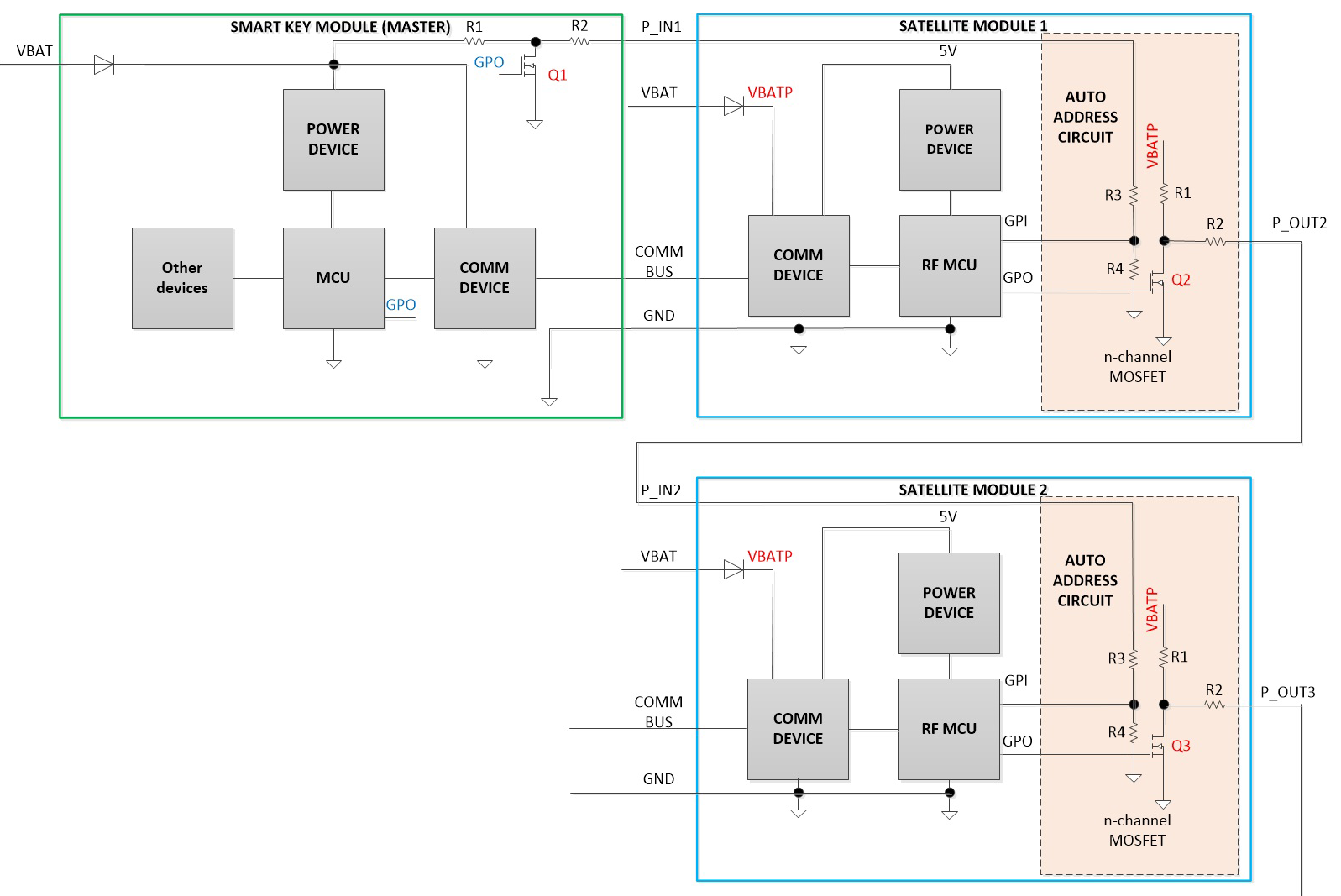 图 4. 单线自动寻址方法用一个 MOSFET 和几个电阻器代替了 LIN PHY。
图 4. 单线自动寻址方法用一个 MOSFET 和几个电阻器代替了 LIN PHY。
中央模块通过使用场效应晶体管 Q1 在 P_IN1 线上发送脉冲宽度调制 (PWM) 信号来启动自动寻址过程。通过分压器,第一个卫星模块接收电池电量唤醒信号 P_IN1,向蓝牙 MCU 发出信号以“监听”CAN 总线。同时,中央模块开始不断地在 CAN 总线上传输第一个卫星模块 CAN ID。一旦第一个卫星模块接收到 CAN ID 消息,它就会向中央模块发送一条确认消息,以确认地址的正确接收。发送确认消息后,第一个卫星模块向第二个卫星模块发送 PWM 唤醒信号,通知该模块开始侦听 CAN 总线并接收其新的 CAN ID。中央模块收到第一个卫星模块的确认报文后,CAN总线会不断地传输第二个卫星模块的CAN ID报文,直到收到第二个卫星模块的确认报文。
总之,每个卫星模块一个接一个地唤醒下一个接收来自 CAN 总线的 CAN ID。中央模块在接收到来自被寻址卫星模块的确认消息后,将发送的下一个 CAN ID 递增,直到所有模块都被寻址*。
虽然这是一个改进,但这种实现仍然需要在中央模块和每个卫星模块之间布线,如图 5 所示。
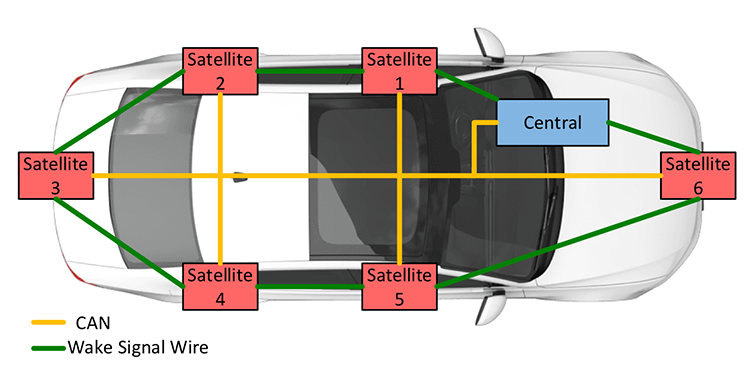
图 5. 单线自动寻址架构仍然需要在中央模块和卫星模块之间布线。
无线自动寻址/电缆更换
德州仪器 (TI) 还开发了一种使用蓝牙定位技术的自动寻址方法。这些技术使蓝牙卫星模块能够在制造期间和更换模块后从中央模块分配一个 CAN 地址。模块寻址过程从被确定为最靠近中央模块的模块开始,并按照距离从最近到最远的顺序继续,直到最远的模块被寻址。实际位置不是必需的,因为模块的放置、测量技术和模块周围环境将决定测量距离。距离 dn 表示测量的距离(从蓝牙接收信号强度指示 [RSSI]),理想情况下:
d1
例如,图6所示为框图以及各模块与中心模块的距离。
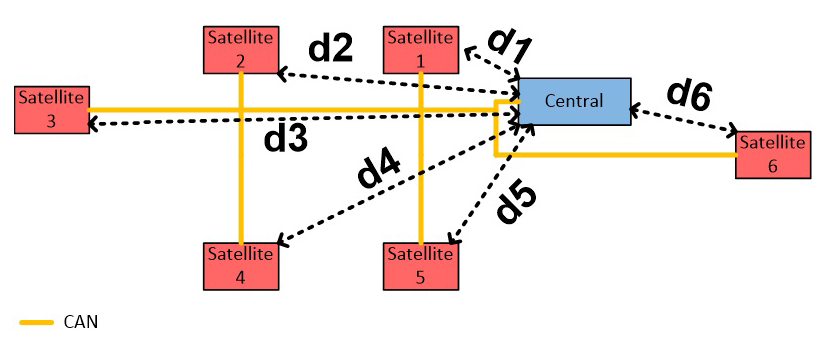
图 6. 该图显示了无线自动寻址方法中每个模块与中央模块之间的距离。
实际上,由于特定卫星和中央模块之间空间的射频 (RF) 传播特性,实际距离可能与测量距离不同。但是,只要每个卫星模块的测量距离重复一致,并且多个模块的测量距离之间没有重叠,中央模块就可以正确定位它们,而无需知道它们在车辆周围的确切位置,因为测量的距离总是从最短到最远的顺序相同。因此,中央模块通过之前的测试会知道,第一个模块始终是驾驶员侧车门(CAN 地址 1),第二个模块始终是前保险杠(CAN 地址 2),依此类推。
为了确保自动寻址方案能够可靠地工作,必须进行仔细的测试以了解每个车型的特征,从而能够识别和解决任何潜在问题。例如,如果两个或多个未寻址卫星模块之间的中央模块距离测量值相似或相等,则可以使用先前寻址的卫星模块来定位那些中央无法区分的未寻址模块,如图 7 所示。这可以也可以使用多个卫星模块来完成。
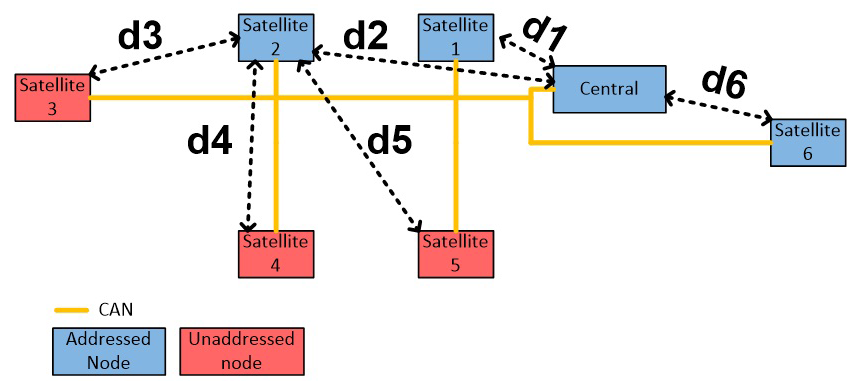
图 7. 先前寻址的卫星模块可用于定位主机无法区分的未寻址模块。
当中央模块能够定位卫星 1、2 和 6,但不能定位卫星 3、4 和 5 时,然后使用卫星模块 2 测量卫星模块 3、4 和 5 的距离。同样,只要距离测量一致,模块间距离测量不重叠,卫星模块可以正确寻址,并且总是以相同的顺序寻址。
实施
为了与低功耗蓝牙协议的通用访问配置文件 (GAP) 层保持一致,我们将中央模块称为“扫描器”,将卫星模块称为“广告商”。 GAP 层处理设备的访问模式和程序,包括设备发现、链路建立、链路终止、安全特性的启动和设备配置。与自动寻址相关的设备的两种状态是:
- 广告商:设备用特定数据做广告,让任何发起设备知道它是一个可连接的设备(注意:此广告包含设备地址,并且可以包含一些附加数据,例如设备名称)。
- 扫描器:当接收到广告时,扫描设备向广告商发送扫描请求。
广告商以扫描响应进行响应;这个过程称为设备发现。扫描设备知道广告设备并且可以发起与它的连接。图 8 显示了下面的广告商和扫描仪流程。
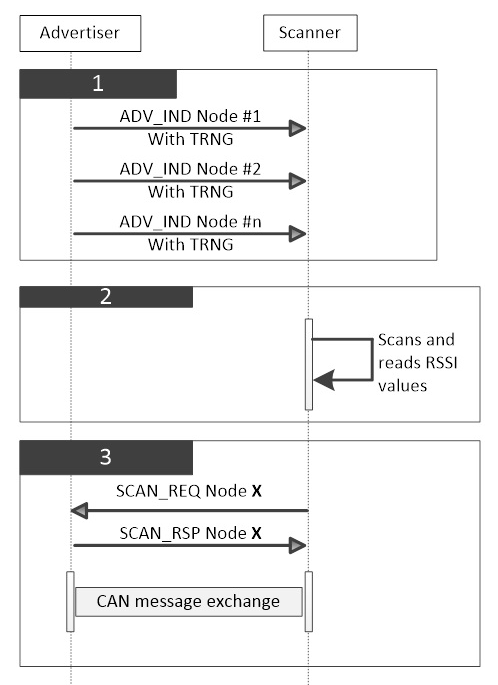
图 8. 此低功耗蓝牙软件图显示了广告商和扫描仪流程。
看看图 8,所有的广告商都会用特定的数据做广告,他们会生成一个真正的随机数作为他们广告数据的一部分。这保证没有节点重复。
扫描器会多次扫描并读取每个广告商的 RSSI 值;然后它会平均 RSSI 值以确定最接近它的广告客户。
扫描器将向最近的广告商发送 SCAN 请求;然后它会发送自动寻址CAN消息并等待广告商CAN消息确认。
广告商将使用 SCAN_REQ 启用 CAN 自动寻址。广告主收到自动寻址CAN报文后,发送CAN确认报文,停止广告。
重复这些步骤,直到所有广告客户都已自动寻址。
结果
测试是使用汽车访问蓝牙低功耗 + CAN 卫星模块参考设计以及 12 英尺线束完成的。每个连接器之间的间隔约为 6 英尺(图 9)。
点击查看大图
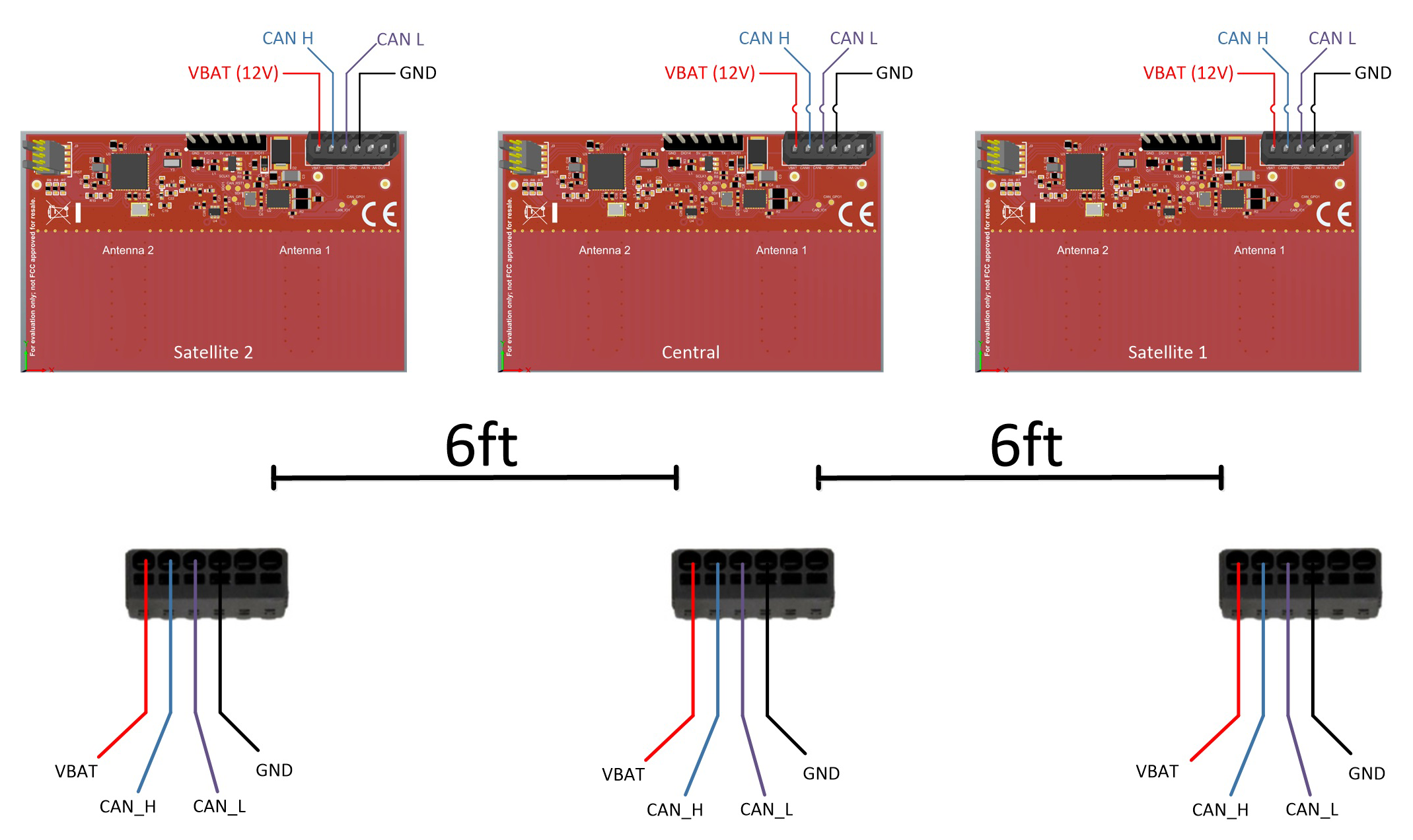
图 9. 用于测试的硬件设置包括 TIDA-020032 参考设计。
并且如图 10 所示放置电路板(其中 d1 ~4 ft 和 d2 ~8 ft):
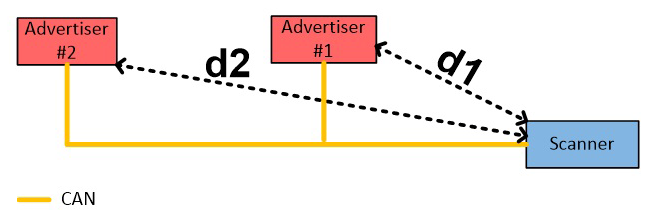
图 10. 此图显示了用于测试的硬件位置。
扫描仪的低功耗蓝牙参数为 1 秒扫描持续时间和 250 毫秒扫描窗口和间隔。广告商的低功耗蓝牙参数以 100 毫秒的间隔进行广告。在每个测量周期内,扫描仪为每个节点采集 10 个 RSSI 样本,并对每组测量值求平均值以生成每个广告客户的测量距离值。
比较三种自动寻址方案
之前测试的结果总结在表 1 中,该表比较了本文讨论的三种自动寻址技术的相对延迟、可靠性和实现成本。
表 1. 自动寻址技术的比较
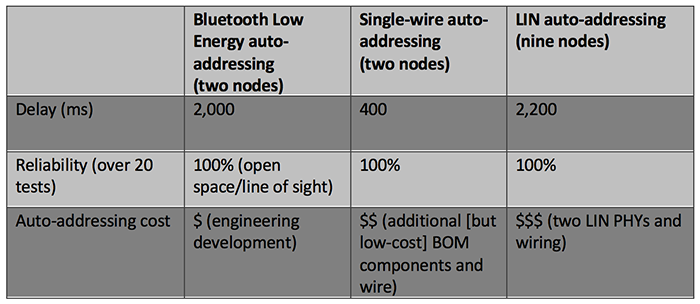
表 1 比较了我们的无线蓝牙低功耗寻址测试与前面讨论的两种有线自动寻址技术的结果。从这些结果来看,无线技术似乎比有线技术需要大约 5 倍的时间。通过进一步细化蓝牙低功耗网络的参数,可以实现更好、更快的响应;有改进的余地。这将需要进一步测试,因为实际距离可能与测量距离不同,这是由于与车辆中每个节点的特定位置相关的射频传播特性(即非视距挑战)。
从材料的角度来看,无线自动寻址是成本最优化的解决方案,不需要额外的硬件,也不需要模块之间的额外布线。但是,为了享受这些优势,系统设计人员需要进行测试以提供 RF 性能以优化软件并解决不准确之处。如果您更喜欢有线方法,TI 的有线自动寻址方法需要在 BOM 中添加一些小型低成本组件,以及连接每个模块之间的电线。在为蓝牙汽车访问系统选择实现自动寻址功能的方法时,它们共同提供了一组选项。
* 有关单线自动寻址方法的其他详细信息和测试结果,请参阅德州仪器 (TI) 汽车接入蓝牙低功耗 + CAN 卫星模块参考设计指南。
参考资料
- 蓝牙核心规格
- 连接标准为蓝牙 SIG 制定了新的安全标准
>> 本文最初发表于我们的姊妹网站 EDN。
嵌入式