

通过垃圾箱拣选自动化您的流程——这就是要寻找的内容
为什么 阅读: 多年来,拣选箱一直是自动化领域最具挑战性的过程之一。虽然该技术可以通过多种方式优化您的生产,但某些任务可能仍然过于复杂而无法处理。本文展示了可以通过垃圾箱拣选实现自动化的流程、潜在挑战及其解决方案。
什么是拣货箱?
垃圾箱拾取的目标是使用视觉系统、机器人和抓手从垃圾箱中拾取随机放置和定向的类似物体。视觉系统通常会对对象进行 3D 扫描,给出其点云(空间中构成对象的一组点),从而识别它。
然后机器人被驱动进入垃圾箱,捡起物体,离开垃圾箱并到达放置目标,通常是一个盒子或其他一些固定装置。
垃圾箱拣选过程中机器人部分的挑战和解决方案
有些物品将难以到达
捡拾垃圾箱的一个主要问题是机器人无法从垃圾箱中捡起所有碎片。拾取 80% 到 85% 是可以管理的,因为视觉系统将命令机器人拾取易于抓取的物体(例如坐在上面的物体)。
困难的部分是设法抓住最后一个交织在一起或坐在垃圾箱角落的物品。这可以通过两种方式解决。第一个意味着重新设计垃圾箱,使其具有更实用的形状。例如,圆锥形状会使所有部分始终保持在中间。
第二个解决方法是摇动垃圾箱(例如自动使用电机),以便重新排列零件的位置和方向,不再混合。然后相机会更容易识别它们。
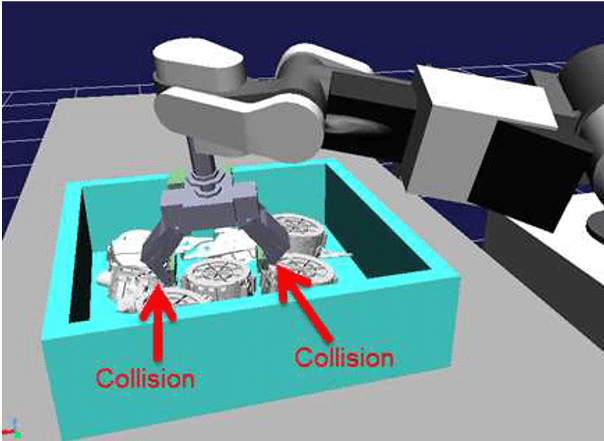
夹持器可能会损坏收集的物品
另一个问题是抓手在尝试拾取物体时可能会与其他物体发生碰撞。拣货策略需要精确,以避免损坏剩余部件(尤其是易碎部件)。
对此的解决方案是具有避障功能的精确路径规划算法。机器人学中的路径规划是寻找从A点到B点的最优连续路径的过程。如果也包括避障,同样的任务也不会碰到任何障碍物。
在某些情况下,垃圾箱中的物体可能具有不同的形状或性质(例如苹果和橙子)。在这种情况下,可以使用软夹具或带吸盘的真空夹具,以适应任何尺寸和形状。

拣选过程中视觉部分的挑战和解决方案
垃圾箱拣选解决方案的视觉系统可以包括 2D 或 3D 摄像头。不用说,3D 摄像头(创建 3D 图像的双摄像头)更贵,但更有效。此外,可以使用产生上述点云的3D激光扫描仪。
闪电、遮挡和边缘检测会使过程复杂化
视觉中反复出现的问题包括照明、遮挡和边缘检测。它们适用于 2D 和 3D 视觉系统。
照明 意味着阴影从每个物体投射到其余物体,因此相机很难检测到它们。可以通过为场景提供额外的照明来解决这个问题,这些照明可以连接到相机旁边或机器人的手腕上。
遮挡 当另一个物体被放置在它的顶部时,该物体对相机不完全可见时发生。同样,在这种情况下,摇动垃圾箱会很有用,因此可以更轻松地检测到物体。更容易检测到。
边缘检测 是找出对象的轮廓周长(边缘)的挑战。当大量物体并排放置时,就像在垃圾箱拣选中一样,这会变得更加困难。解决此问题的方法取决于所使用的软件和方法。
如何通过拣选来发现流程自动化的潜力
如果您考虑使用垃圾箱拣选在您的公司中实现流程自动化,以下几点可能表明了自动化的一些潜力:
- 大量小部件: 如果系统设置正确,机器人可以快速而稳健地拾取这些零件(例如螺钉或垫圈)。
- 无序项目: 无法从先前的流程或次级供应商处有序接收项目的流程。在大多数情况下,要求以结构化的方式交付物品会更有效,从而完全避免拣货。
- 具有磨砂表面的部件。 如果零件具有高度反射性,例如机加工的金属零件,则可能会遇到闪电问题。大多数相机系统都很难找到要拣选的物品。
- 循环时间超过大约 10 秒的过程 ,并且最好带有用于拾取零件的缓冲区。垃圾箱拣选系统需要一些时间来查找和拣选每件商品。
结论
对于开发人员来说,垃圾箱拣选是真正的圣杯。对于客户来说,可能并非如此。通常,尽量避免使用垃圾箱拣选解决方案是一个好主意,只需确保物品的交付格式是有序的,而不是在垃圾箱中随机放置。
这通常会增加一些成本,但与使用 bin 拣选相比,它通常更便宜且处理速度更快。
然而,在某些情况下这是不可能的,或者非常昂贵。在这些情况下,能够使用垃圾箱拣选功能非常棒。
如果您的流程符合前四点,则它可能非常适合垃圾箱拣选。在寻找要使用的解决方案时,请注意一些解决方案仍处于实验阶段,而其他解决方案则需要几年时间才能成熟并证明其稳健性。
工业机器人