

电容式加速度计简介:使用电容式传感测量加速度
在本文中,我们将讨论如何使用电容感应来测量加速度。
加速度计可用于不同的应用领域。例如,在汽车应用中,加速度计用于激活安全气囊系统。相机使用加速度计来主动稳定图片。计算机硬盘驱动器还依靠加速度计来检测可能损坏设备读/写头的外部冲击。在这种情况下,当发生外部冲击时,加速度计会暂停驱动操作。这些只是少数加速度计应用。
这些设备的用途实际上是无限的。微加工技术的巨大进步使当今小型、低成本的微加工加速度计成为可能。事实上,小尺寸和低成本是使我们能够将这些设备应用于如此广泛的应用的两个主要因素。
在本文中,我们将了解测量加速度的物理原理。我们将看到质量弹簧阻尼器(也称为质量阻尼器弹簧)结构如何将加速度转换为位移量,以及如何应用电容传感方法将这种位移转换为与加速度成正比的电信号。应用加速度。
使用质量弹簧阻尼器测量加速度
可以使用如图1所示的质量-弹簧-阻尼器结构来测量加速度。
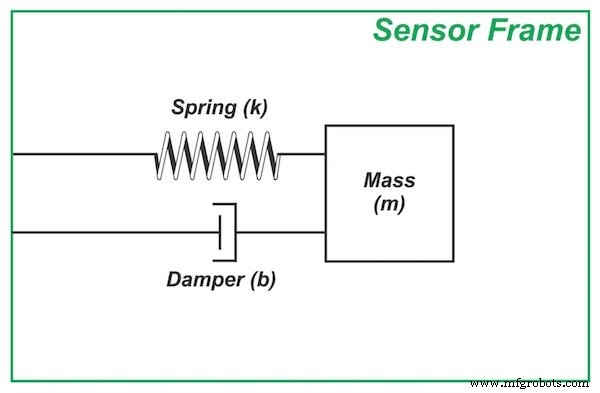
图 1。 质量-弹簧-阻尼器结构
已知数量的质量,通常称为检测质量(或测试质量),通过弹簧连接到传感器框架。
尽管阻尼器是该系统的重要组成部分,但我们将其搁置到本系列的下一篇文章中,因为它对 EE 来说可能有点神秘,并且可能需要用几段文字来介绍阻尼器的基本概念。
让我们看看图1所示的结构是如何检测加速度的。
当传感器框架因外力而加速时,质量块会由于其惯性而趋于“后退”。这会改变检测质量相对于传感器框架的相对位置,如下图所示。
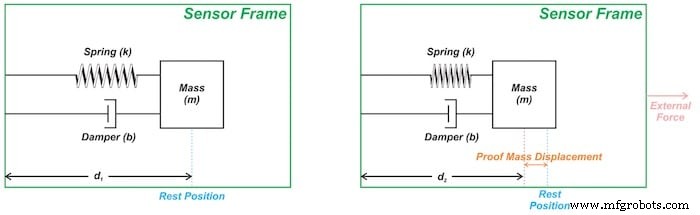
图 2。 (a) 当没有外力作用时,质量块处于静止位置。 (b) 当坐标系向右加速时,传感器坐标系中的观察者观察到质量块位移到其静止位置的左侧。
图 2(a) 显示了当没有外力时,质量块处于静止位置。当外力作用在框架上时,如图 2(b) 所示,框架向右加速。质量块最初趋于静止,这改变了质量块相对于框架的相对位置(d2
在传感器的非惯性(即加速)坐标系中的观察者观察到,质量块位移到其静止位置的左侧。弹簧由于检测质量位移而被压缩,并在检测质量上施加与位移成正比的力。弹簧所施加的力将质量块向右推,使其朝外力方向加速。
如果为系统的不同参数选择合适的值,则检测质量位移将与坐标系加速度的值成正比(在系统的瞬态响应消失后)。
总之,质量-弹簧-阻尼器结构将传感器框架的加速度转换为检测质量位移。剩下的问题是,我们如何测量这种位移?
检测质量位移可以通过多种方式测量。一种常见的方法是图 3 中描绘的电容式感应方法。
有两个电极固定在传感器框架上,还有一个可移动电极连接到质量块。这将创建两个电容器,Cs1 和 Cs2,如图 3 所示。
当质量块沿一个方向移动时,可动电极和固定电极之一之间的电容增加,而另一个电容器的电容减小。这就是为什么我们只需要测量感应电容器的变化即可检测与输入加速度成正比的检测质量位移。
为了准确测量感应电容的变化,我们可以应用同步解调技术。图 4 显示了 ADI 公司 ADXL 系列加速度计中采用的信号调节的简化版本。
在这种情况下,1 MHz 方波用作感应电容器 Cs1 和 Cs2 的交流激励。施加到固定电极的方波具有相同的幅度,但彼此相差 180°。当可动电极处于静止位置时,放大器输入端的电压为零伏。
当可移动电极靠近固定电极之一时,来自该电极的激励电压的较大部分出现在放大器输入 Vbridge,这意味着出现在放大器输入端的方波与激励电压同相较近的电极。
例如,在图4中,由于Cs1大于Cs2,放大后的输出是与Vdrive+同相的方波。
Vbridge 的振幅是检测质量位移的函数;但是,我们还需要知道Vbridge相对于Vdrive+和Vdrive-的相位关系,以确定质量块的位移方向。
同步解调器基本上是将放大器输出乘以激励电压(Vdrive+ 或 Vdrive-),将放大器输出端的方波转换为可显示位移量及其方向的直流电压。
要了解同步解调如何实现这一点,请参阅我关于 LVDT 解调技术的文章:LVDT 解调:整流器类型与同步解调。
图 3 中描绘的电容式感应具有差分性质:当 Cs1 增加时,Cs2 减少,反之亦然。
也可以采用单端电容感测,其中省略了一个固定电极,因此只有一个可变电容器。在这种情况下,我们可以对系统进行建模,如图 5 所示。
这个单端版本似乎是一个更简单的解决方案。那么,我们为什么不使用单个感应电容器呢?
让我们更仔细地研究一下这个电路。
在上图中,Cp 模拟了从可移动电极到地面的总寄生电容。理想情况下,Vbridge 在虚拟地,我们可以忽略 Cp,因为它在一侧有地,在另一侧有虚拟地。
因此,输出可以简单地获得为:
\[ V_{output} =-\frac{C_s}{C_F} V_{drive}\]
请注意,偏置电流路径未在图 5 中显示。使用电容器基本方程,我们可以根据检测质量位移来表示输出。
对于电容器 C,我们有:
\[ C =\epsilon \frac{A}{d}\]
其中 ε 是介电常数,A 是平行板面积,d 是两个导电板之间的距离。为简单起见,假设两个电容器 Cs 和 CF 具有相同的 ε 和 A。
等式 1 可以简化为:
\[ V_{output} =-\frac{d_F}{d_s} V_{drive}\]
其中 dF 和 ds 分别表示 CF 和 Cs 电极之间的距离。 ds可以表示为初始距离d0与位移值Δd之和。
从那里我们可以得到:
\[ V_{output} =-\frac{d_F}{d_0 + \Delta d} V_{drive}\]
如您所见,位移项 (Δd) 位于输出方程的分母中。因此,输出是检测质量位移Δd的非线性函数。
让我们来看看图 4 中描绘的差分电容感应的传递函数。
您可以验证,通过差分电容感应,Vbridge 由下式给出:
\[ V_{bridge} =\frac{C_{s1} V_{drive+} + C_{s2} V_{drive-}}{C_{s1} + C_{s2 }} \]
应用公式 2 并假设两个电容器 Cs1 和 Cs2 具有相同的 ε 和 A 值,我们得到:
\[ V_{bridge} =\frac{d_{s2} V_{drive+} + s_{s1} V_{drive-}}{d_{s1} + d_{s2 }} \]
其中 ds1 和 ds2 分别表示 Cs1 和 Cs2 电极之间的距离。当 ds1 增加时,ds2 减少相同的量,反之亦然。
假设:
\[ d_{s1} =d_0 - \Delta d \] \[ d_{s2} =d_0 + \Delta d \] \[ V_{drive+} =- V_{drive-} \]
等式 3 简化为:
\[ V_{bridge} =\frac{\Delta d}{d_0} V_{drive+} \]
如您所见,对于差分结构,输出电压是检测质量位移 Δd 的线性函数。请注意,虽然我们可以使用软件来消除传感器线性误差,但线性响应是可取的,因为它可以提高测量精度并便于系统校准。
我们看到了质量弹簧阻尼器结构如何将加速度转换为位移量,以及如何应用电容传感方法将这种位移转换为与施加的加速度成正比的电信号。
我们还简要介绍,对于对施加的加速度成比例的证明批量位移,应适当地选择质量弹簧阻尼系统的不同参数。
在下一篇文章中,我们将推导出质量-弹簧-阻尼器系统的传递函数,以更深入地了解系统操作。
测量证明质量位移:电容传感方法
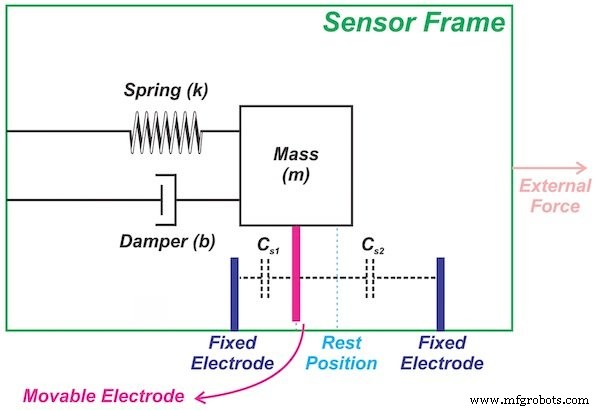
图 3
使用同步解调的加速度计信号调节
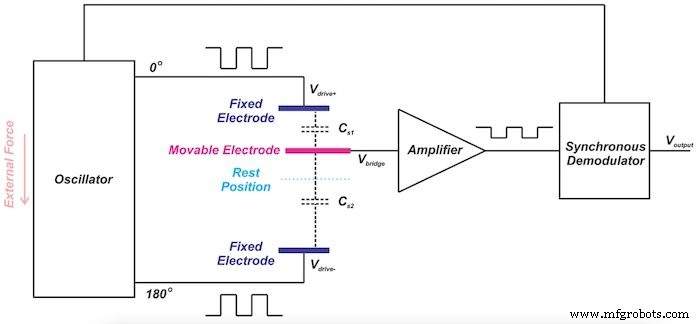
图 4。 图片(改编)由 Analog Devices 提供
为什么不使用单个感应电容器?
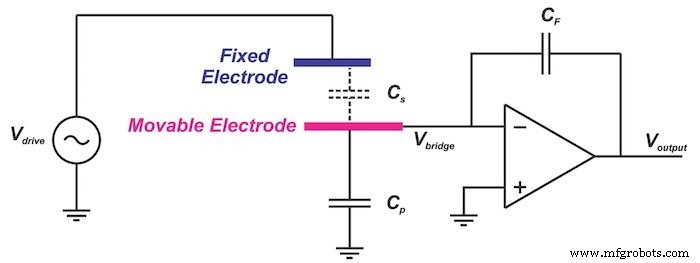
图 5
单感测电容结构:非线性输出
等式 1
等式 2
微分结构:线性输出
等式 3
结论
要查看我的文章的完整列表,请访问此页面。
传感器