

使用 SRF04 的全自动水位控制器
使用 SRF04、L293D 和 PIC16F84A 的全自动水位控制器
自动水位控制器简介
监测和控制水箱中的水位 是几乎许多住宅和商业领域中最重要的工作之一。在大多数情况下,尤其是在住宅建筑中,由于没有任何自动装置,经常监测水箱中的水位变得令人厌烦和不便。事实上,对于缺水的地方来说,溢水是一件非常昂贵的事情。
解决上述问题的唯一方法是拥有一种自动监测和控制水位的方法。虽然使用距离传感器、使用电流探头、使用超声波测距仪等技术有很多,但这里我们将重点介绍使用超声波测距仪。

- 相关项目:雨警报电路 - 雪、水和雨探测器项目
水位控制器系统概览
该系统由放置在水箱顶部的超声波测距传感器组成,一旦触发,它就会发出超声波信号。水箱中的水会反射掉信号。传感器会接收到这个信号,这两个信号之间的时间可以估计出信号行进的距离,从而估算出顶部的水位。
这里使用微控制器向超声波测距仪发送触发信号。一旦接收到回波,就会计算两个脉冲之间的时间延迟,这与水位成正比。延时是通过定时器计算的,定时器的计数脉冲数表示信号行进的距离,或水位。
由于这里的护林员被放置在水箱顶部,因此可以根据水箱顶部的水位来控制水流。例如,如果发现测量范围在 0 到 1 cm 之间,则说明水箱溢出,微控制器发送控制信号使电机反向旋转,以去除多余的水。 '
如果范围在 2 到 5 cm 之间,则油箱已满,微控制器发送控制信号以关闭电机。如果范围超过5cm,则油箱几乎是空的,微控制器发出控制信号使电机正向旋转。
自动水位控制器电路图
点击图片放大
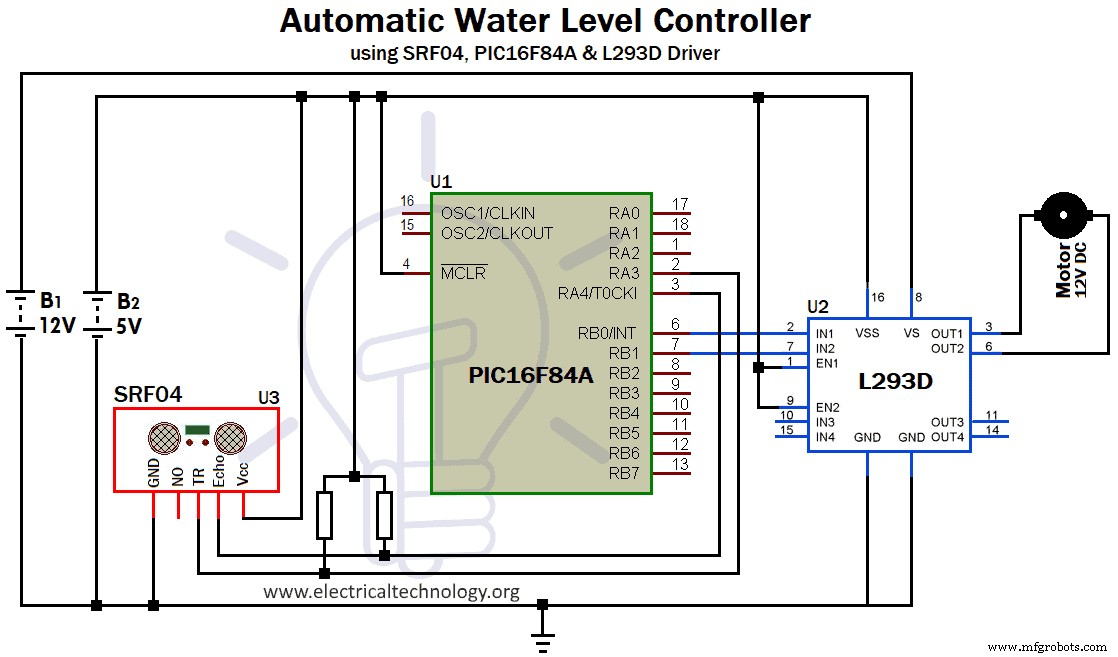
图1:水位控制器
部件说明
以下组件将用于设计电路。
- 超声波测距仪 SRF04
- PIC单片机PIC16F84A
- 电机驱动器 L293D
- 直流电机
- 两个 1K 电阻
让我们对每个组件有一个简单的了解
超声波测距仪 SRF04 :
SRF04 是一种高质量的超声波测距仪,用于许多机器人应用中,以便轻松检测障碍物。它需要 10 微秒的信号被触发。 
图 2:SRF04 超声波测距仪
一旦触发,它会发出 8 个超声波脉冲,频率为 40 KHz,同时发送将其回波线提升到 HIGH。一旦它接收到反射信号或回波,它就会将回波线降低到 LOW。
因此,回波脉冲的宽度表示信号行进的距离,即从护林员到物体的距离。因此,回波线是一个脉冲,其宽度与到物体的距离成正比。对于 1cm,回波脉冲宽度为 58 微秒。 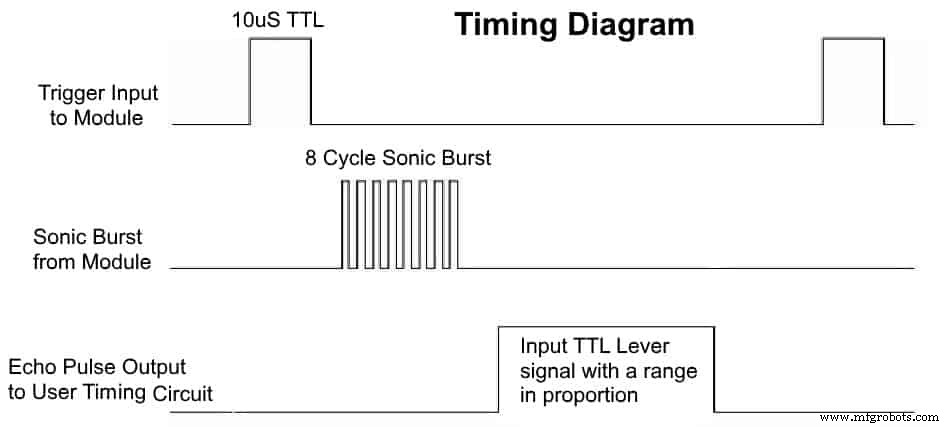
图 3:SRF04 时序图
PIC单片机PIC16F84A:
图4:PIC单片机PIC16F84A
它是一个 CMOS 兼容的 8 位 18 引脚闪存微控制器,带有一个 8 位定时器(带有 8 位可编程预分频器)。定时器操作由以下寄存器控制——OPTION_REG、TMR0 和 INTCON。 OPTION_REG 是一个 8 位寄存器,其 5 th 位(T0CS)选择所需的定时器或计数器操作。
设置该位选择计数器操作,清除它选择定时器操作。 TMR0 是定时器寄存器,而 INTCON 是中断寄存器,其第 5
位 (T0IE) 表示定时器标志,即它在定时器溢出时设置。 
电机驱动器 L293D:
图5:电机驱动IC L293D
它是一个 16 针、基于 H 桥的直流电机驱动器 IC。它具有驱动两个电机和双向驱动的能力。它由两个启用引脚(引脚 1 和 9)组成,当设置为高电平时,启用 IC 操作。它基本上充当微控制器和直流电机之间的接口。它由四个输入引脚组成——每个 H 桥电路两个。下面给出了一个表示电机控制的表格。 
| IN1(引脚 2) | IN2(引脚 7) | EN1(引脚 1) | 电机操作 |
| 高 | 高 | 高 | 关闭 |
| 低 | 低 | 高 | 关闭 |
| 高 | 低 | 高 | 开启(顺时针) |
| 低 | 高 | 高 | 开启(逆时针) |
| X | X | 低 | 关闭 |
注意:由于SRF04是TTL兼容器件,PIC16F84A是CMOS兼容器件,我们使用1K值的上拉电阻来补偿电压电平变化。
自动水位控制器的工作与操作
程序是这样编写的,从微控制器发送一个 10 微秒的脉冲来触发超声波测距仪。这是使用延迟函数编写的。定时器寄存器 TMR0 装入十进制值 200,因此它进行 55 次计数。
SRF04的输出,回波信号在RA4管脚(定时器时钟管脚,从而为定时器提供外部时钟脉冲)接收。一旦回波信号从 HIGH 变为 LOW,定时器就会被激活。随着定时器计数,中断标志位 T0IE 被监控。一旦设置,定时器将被停用。
对另一个回波脉冲重复该过程,依此类推。计算计时器操作的次数,这表示回波脉冲的数量。由于每个回波脉冲为 58 微秒,因此它表示 1 厘米。因此,5 个回波脉冲将表示 5cm。该计数值,以整数形式存储,用于控制直流电机。
如果数值在2到5之间,单片机发送HIGH信号到引脚RB0和RB1(分别连接到L293D的IN1和IN2),关闭电机。如果值在 5 到 20 之间,则微控制器向 IN1 发送 HIGH 信号,向 IN2 发送 LOW 信号,以打开电机并使其顺时针方向旋转。如果值在 0 到 1 之间,则微控制器向 IN1 发送 LOW 信号,向 IN2 发送 HIGH 信号,以打开电机并逆时针方向旋转。
使用SRF04自动水位控制器的优势
- 这将是一个简单方便的系统。
- 由于使用低成本组件,这将是一个低成本系统。
- 使用自动技术将消除使用手动方式控制水位所面临的障碍。
- 由于不使用机械部件,这将消除机械磨损或腐蚀的风险。
自动水位控制器的缺点
- 超声波测距仪 SRF04 会因使用许多电子设备而受到阻尼,因此应适当绝缘。
- 该系统的设计使得传感器和执行器需要彼此靠近放置。通俗地说,这个控制系统是针对水箱靠近水泵的地方。因此,对于许多使用潜水泵且水箱位于屋顶的建筑物,此自动水位控制器系统 不能使用。但是,这可以通过使用通信电路进行修改。
工业技术