

工业机器人:传统、协作和自适应
什么是工业机器人?
它们都是允许在工业环境中自动执行任务的复杂机制。这包括来自机械臂 , 堆垛机、3 轴系统、自动机 等。它们的特点是必须由外部信号及其编程动作控制,才能执行分配的任务。这些信号可以从PLC给出的任务开始信号到计算机视觉系统传输的运动坐标,以执行下一个任务。
工业机器人的种类及区别
工业机器人的两种类型是传统机器人和协作机器人。近年来,一种新型的工业机器人得到了定义和区分。它们是自适应或智能机器人。
- 传统机器人的主要特点 他们是否需要有物理屏障才能安全使用。
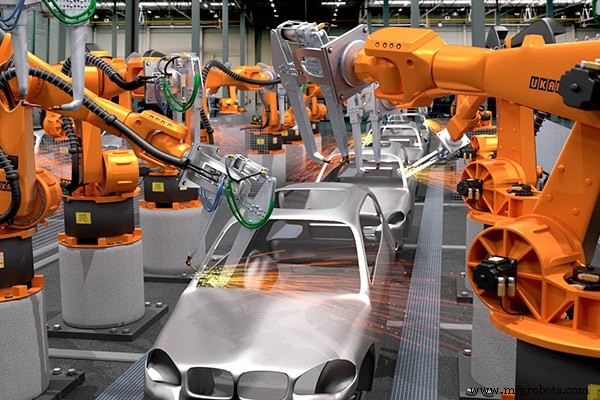

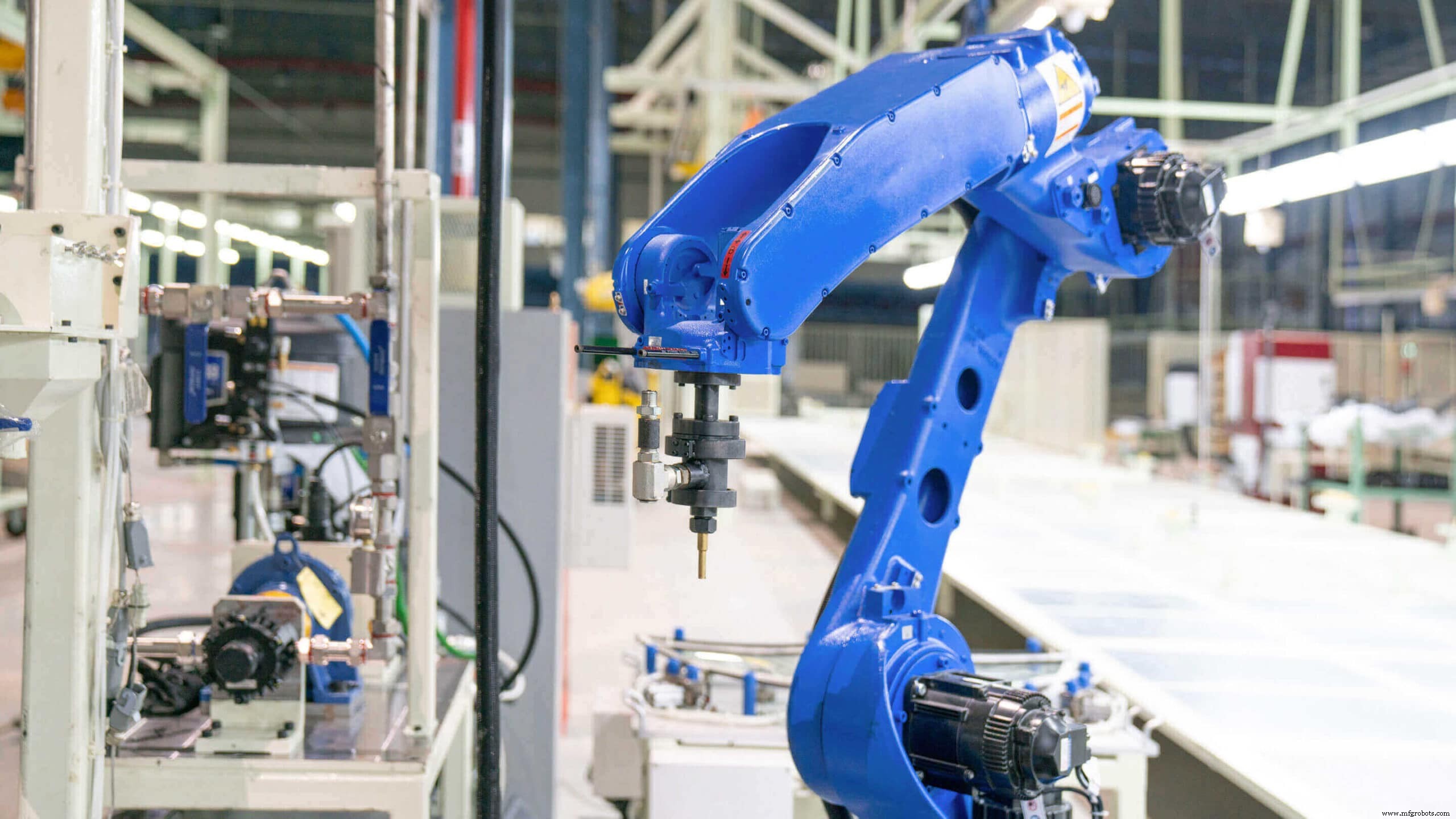
- 对于协作机器人 ,最具代表性的特点是他们的设计准备能够与人类操作员协作,而无需物理障碍。与传统机器人相比,保持这种操作形式的负面后果是协作机器人的速度和额定负载较低。
- 自适应或智能机器人 是两种类型的演变。它可以具有两种类型的优点和缺点。传统机器人和协作机器人都可以转变为自适应或智能机器人。主要特征是它能够对环境做出反应并使其动作适应它正在执行的特定任务。这要归功于为机器人提供“感官”的传感器层以及管理接收到的信息并控制自适应或智能机器人运动的深度学习或机器学习系统。
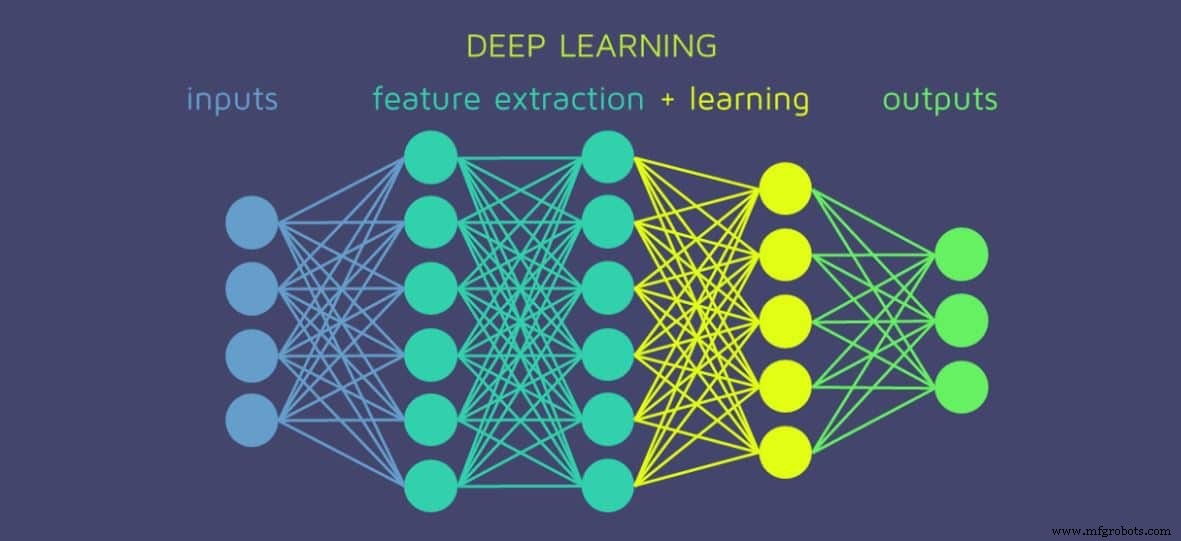
机器人中的深度学习和神经网络
传感器系统对机器人的数据贡献本身并不能提供智能或对环境和它正在执行的任务的适应性。必须处理和处理这些数据,以便定义自适应或智能机器人要执行的适当动作。根据其复杂性,可以使用传统软件或深度学习来完成此数据处理 系统和神经网络 .深度学习用于那些基于传感器数据进行决策非常复杂的系统中。
机器人爪子和工具的设计
工业机器人系统的一个非常重要的部分是与产品或过程交互的方式。爪子和工具的设计与机器人的编程和通信一样重要。这些系统必须保证工业机器人不会损坏产品 并且他们在工业过程中正确地执行他们的任务。有时,由于要处理的产品的形状或工艺的复杂性,这种设计可能非常复杂。

自适应或智能机器人的应用、优势和优势
工业机器人的应用广为人知,涵盖的主题包括:
- 组装
- 机器的装卸。拾取和放置
- 包装和码垛
- 零件运输、零件拆卸
- 切割、打磨和抛光
- 绘画过程
- 粘合剂和密封剂应用
- 焊接
- 测量和质量控制
然而,由于其可变性,更复杂的过程 不是自动化的。几乎每天都为新变体创建程序或无法保证水平,这使得通过传统或协作机器人技术实现工业化不可能或无利可图。对于这些情况,自适应或智能机器人 提供了一个解决方案。它的主要优点是适应工作环境 .您无需使用预设任务或运动坐标,而是使用浮点 .这些点在每种情况下都由我们连接到装置的传感器定义。传感器提供控制单元用来定义浮点的信息。这种对环境的适应或多或少取决于控制单元的处理能力以及传感器提供的数据的分辨率和质量。
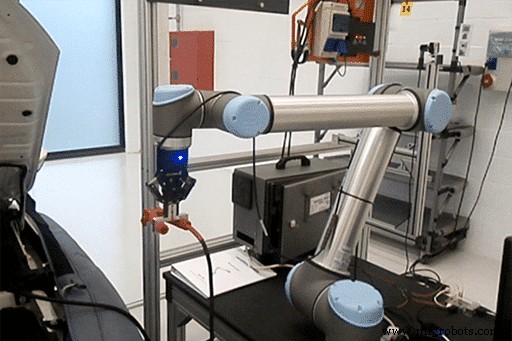
在这个项目中 由 ATRIA 执行,您可以了解自适应机器人系统,在该系统中,借助视觉相机,系统能够处理和选择应连接电池的点,而无需任何类型的固定尺寸。自适应机器人的另一个优势是它可以应用于预先存在的协作或传统装置 投资水平较低。 这是因为硬件可以在新安装中得到充分利用。最后,自适应或智能机器人的另一个优势是其灵活性 .如果环境或流程发生变化,系统无需经济投资即可适应。软件级别的修改或传感器更新可能足以使自适应或智能机器人安装正常运行。
在这个另一个项目 并且还得益于自适应机器人系统,机器人能够决定如何参与,因为它们是在混乱中接收的,以及应该如何将它们放入盒子中
执行机器人项目的步骤
在涉及工业机器人的任何自动化过程中,我们应该遵循的最常见步骤是:
- 需求定义 :在此步骤中,定义了工业机器人要执行的任务及其必须满足的特性。良好的需求定义可以在后续步骤中节省大量后期工作和开发资金。
- 硬件和软件选择 :应该基于上一步得到的数据和工作组的经验。在此步骤中,定义最合适的机器人系统类型是传统机器人、协作机器人还是自适应/智能机器人。
- 装置设计 使用前两个步骤中客户端定义和验证的所有数据。在设计中,需要定义流程的不同阶段和部分,以及不同元素之间的工作流程和关系。
- 验证设计阶段检测到的最关键点 .为此,可以进行设备的原型和部分构造。这一步在自适应或智能机器人的情况下非常重要。也适用于零件或流程的可变性非常高的设施。
- 工业化 设计和验证的设施。在此步骤中,定义将用于验证安装的测试非常重要。
您想在您的任何流程或产品中应用机器人吗? 联系我们!
相关帖子:
- 未来工厂的工业机器人
- 人工智能机器人
- 为什么要使用协作机器人?
- 工业 4.0 在不同领域的应用
相关项目:
- 将电池与计算机视觉相结合
- 使用 UR 和视觉从胶带中拾取和放置
- 带协作机器人的末端功能系统
- 视觉和两臂协作机器人拣货
- 在高温下使用 MIR+UR 测试功能
工业机器人