

自定义 RoboDK 界面的 10 种有用方法
每个机器人用户都有不同的编程品味。以下是自定义 RoboDK 界面以适合您的 10 种好方法。
你有没有试过在别人的厨房里给自己做早餐?
这是一场噩梦,不是吗!?
你不知道任何餐具在哪里,烤面包机的按钮排列混乱,冰箱看起来比魔多山脉更难导航。
这正是当您尝试使用不同于您通常使用的编程软件时的感觉。界面看起来不太对劲,可能需要一段时间才能适应。
但是,有了 RoboDK,您无需妥协。该界面是非常可定制的。有多种选项可以改变令人印象深刻的不同方面以满足您的需求。
以下是根据您的喜好自定义 RoboDK 界面的 10 种超级有用的方法。
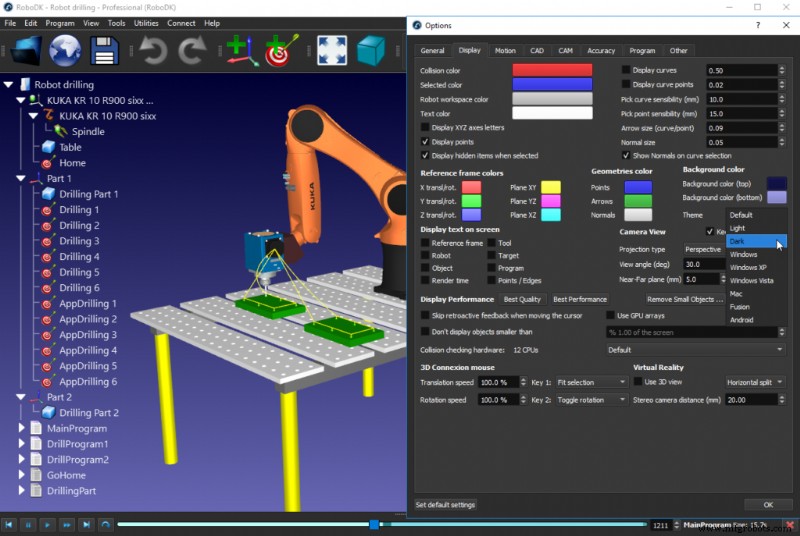
1。更改为暗模式
多年前,在我上大学的时候,我的一位同事告诉我在编程时更改为“暗模式”的好处。
大多数软件包使用带有黑色文本的白色背景。暗模式反转所有颜色,使它们相反,即背面背景上的明亮文本。许多人说暗模式可以减轻眼睛疲劳(并且有证据表明它可以减少旧 CRT 显示器的闪烁)。
对于现在使用现代屏幕的黑暗模式是否真的对眼睛更好,存在相互矛盾的理论——编程时定期让眼睛休息会更好——但我们可以肯定地说:有些人喜欢黑暗模式。
如果您喜欢暗模式,RoboDK 现在将在您将操作系统设置为暗模式时自动激活它。您也可以在显示选项中自定义此选项(选择 工具> 选项窗口> 显示选项卡 )。
使用 OLED 显示器(虽然不是 LCD),黑暗模式也可以减少屏幕使用的电量,如果您使用电池供电的 RoboDK,这非常棒。
2。选择所有颜色
即使您不使用深色模式,您也可以根据自己的喜好更改 RoboDK 中几乎所有的颜色。
您可以更改的颜色包括:碰撞颜色、文本颜色、点颜色、背景颜色、参考框架颜色和所选项目的颜色。
这些都可以通过工具>选项窗口>显示选项卡进行更改 .
3。匹配您最喜欢的鼠标模式
作为各种 3D 图形程序的用户,我知道当您切换到一个新程序并且鼠标模式不同时是多么烦人。突然,上变下,下变上,鼠标滚轮功能变化,按键功能翻转。
RoboDK 允许您通过 工具菜单> 选项窗口> 常规选项卡将鼠标模式更改为您喜欢的任何模式 .
4。自动匹配您的 CAD/CAM 包
如果您已将您最喜欢的 CAD/CAM 软件包集成到 RoboDK 中,使用我们的插件之一,您可以让 RoboDK 自动匹配该程序的视觉样式和鼠标模式。
例如,如果您使用的是 SolidWorks 插件,您可以通过插件菜单设置“SolidWorks 主题”。
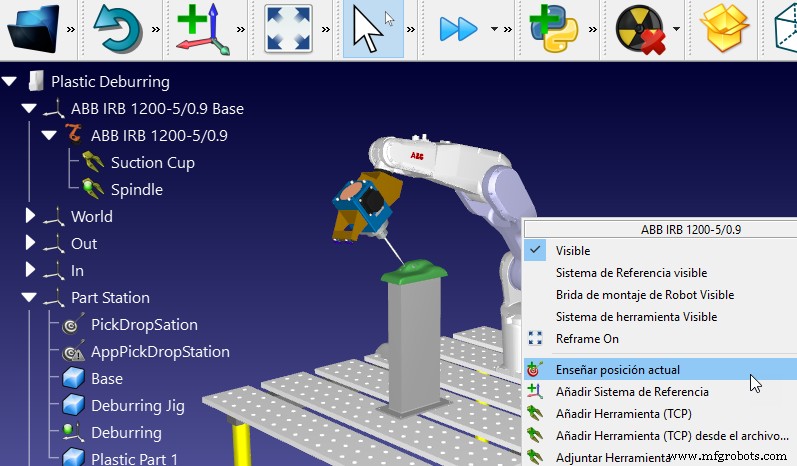
5。更改语言
如果菜单是用您的母语编写的,那么浏览新软件总是会更容易。
在 RoboDK 中,您可以通过工具菜单> 语言轻松更改语言。
在撰写本文时,它包含对 16 种最常用语言的支持。并非每种语言都已被完全翻译,但关键功能都得到了体现。
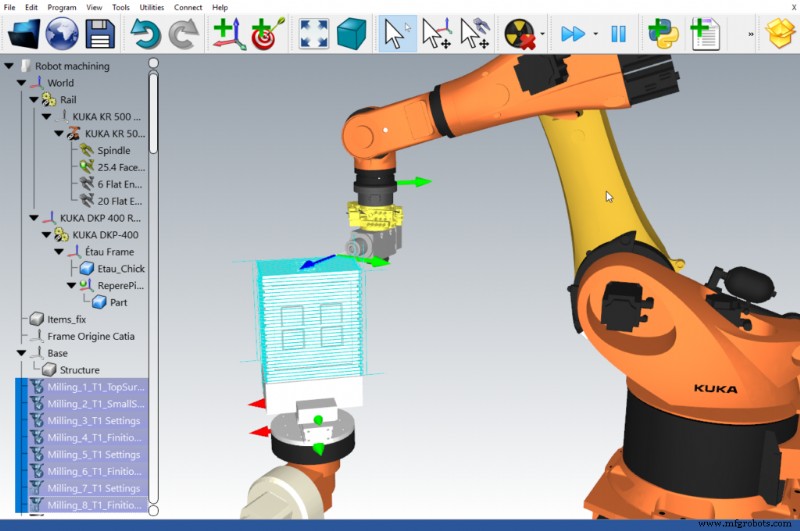
6。切换视角
使用 3D 图形的程序会遇到一个有趣的问题。有时您想像在现实世界中一样查看对象(具有逼真的透视效果)。其他时候,您希望视图更准确地反映尺寸,即使模型看起来不太真实。
您可以通过工具菜单> 选项窗口> 显示选项卡在两种视图(透视和正交)之间切换。
7。切换数字格式
世界上所有的国家都可以分为两组:用点(.)分隔十进制数的国家和使用逗号(,)的国家。
例如:
- 在日本,数字是这样写的: 1,234,567.89 — 全球约 41% 的国家/地区使用此表格。
- 在瑞典,数字是这样写的:1.234.567,89 — 世界上大约 55% 的国家/地区使用此表格。
- 最后,在加拿大,数字会根据上下文以两种形式书写。 — 世界上大约 4% 的国家都是这种情况。
您可以通过工具菜单> 选项窗口> 常规选项卡更改 RoboDK 的号码区域设置。
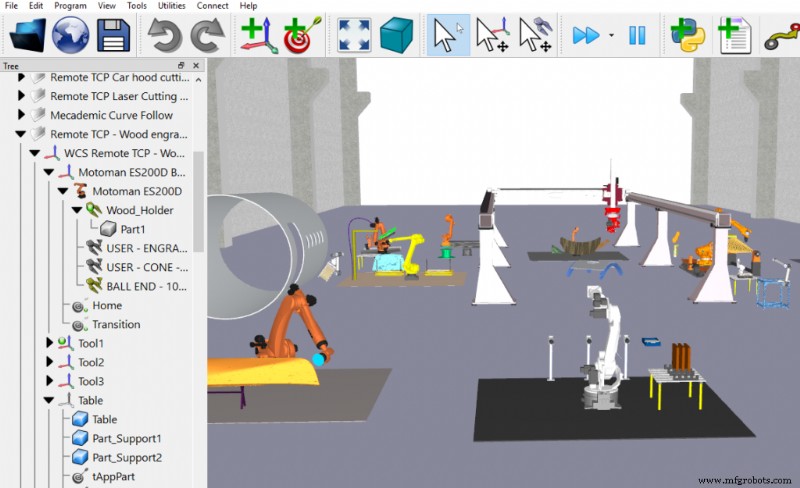
8。设置树的大小和样式
程序树在 RoboDK 窗口的左侧可见。它包含当前模拟的所有对象和程序指令。
有时,您可能希望缩小程序树以更全面地查看其中的所有项目。其他时候,你会想再次放大。
您可以通过按住 Ctrl 来更改程序树的大小 键并旋转鼠标滚轮。
您还可以通过 View menu> Show Tree Inside the Window 将树的背景从透明更改为停靠,反之亦然。
9。优化速度或性能
RoboDK 在性能较低的计算机上运行良好。但是,您可能需要更改一些显示设置以减少计算负载。
您可以通过 工具菜单> 选项窗口> 显示选项卡找到 3 个涉及显示性能的选项 .这些允许您自定义最佳质量或最佳性能的显示。或者,您可以使用 Simplify Object 来减少 3D 模型中的顶点数。
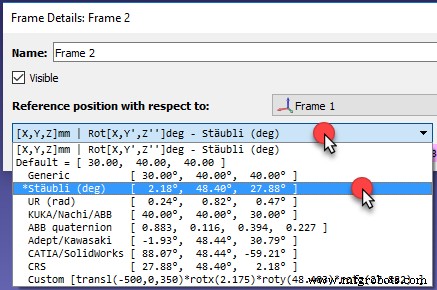
10.选择欧拉角模式
欧拉角是机器人技术中用来表示空间位置和方向的方法。令人恼火的是,每个机器人制造商和 CAD/CAM 软件包都使用略有不同的欧拉角约定来表示一个坐标系(也称为位姿)相对于另一个坐标系的位置。
RoboDK 支持所有主要机器人制造商的欧拉角约定。您可以通过每个坐标系的设置或工具菜单>选项窗口>常规选项卡中的默认设置更改每个使用的约定。
有关欧拉角的完整介绍,请查看我们的文章 Robot Euler Angles:The Essential Primer。
无论您的喜好是什么,RoboDK 都有适合您的选择!
您想如何自定义 RoboDK? 在下面的评论中告诉我们,或加入 LinkedIn、Twitter、Facebook、Instagram 或 RoboDK 论坛上的讨论。
工业机器人