

使用面向场的控制算法平滑 EV 动力系统性能
高性能电机需要一种控制机制来确保提高平稳性、可靠性和效率。这种应用最恰当的例子之一是电动汽车 (EV) 动力系统中使用的电机,它可以由基于磁场定向控制 (FOC) 的系统控制。
为了让 EV 动力系统平稳行驶,控制方案应该使电机能够在很宽的速度范围内运行,并在最低速度下产生最大扭矩。从技术上讲,电机控制必须基于转矩和磁通量,因此我们可以通过控制电流来精确控制转矩。
电机转子旋转的基本原理是在定子中产生磁场。这是通过用交流电给定子线圈通电来实现的。电机平稳运行的秘诀在于了解转子的位置,即转子磁通轴与定子磁轴之间的夹角。一旦知道该值,定子电流就会与转子的扭矩轴对齐。为了达到峰值效率,定子磁通必须垂直于转子磁通。
基于 FOC 的电机控制
在纸面上,典型的基于磁场定向控制(FOC)的电机控制系统如图1所示。
点击查看全尺寸图片
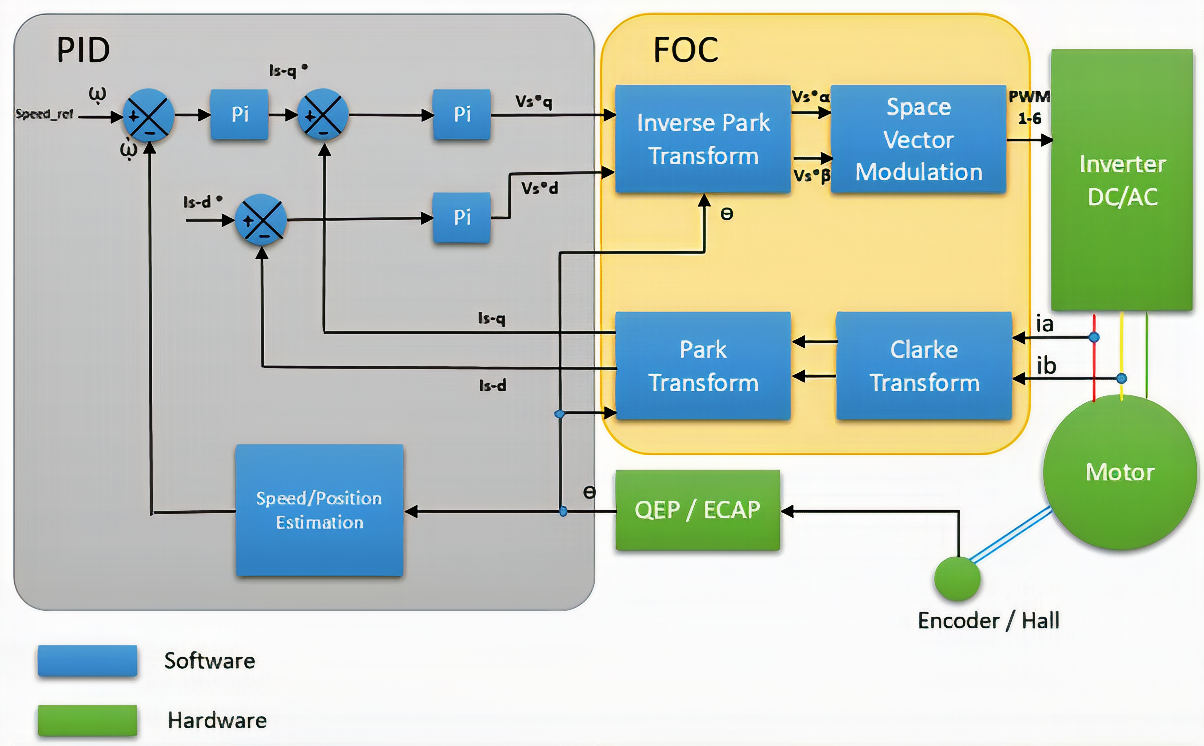
图 1:该图显示了基于 FOC 的电机控制系统的硬件和软件组件。资料来源:德州仪器
让我们了解每个软件和硬件组件:
- 三相逆变器 :三相 AC/DC 逆变器为 PMSM/BLDC 电机提供三相电压以进行驱动。它从空间矢量调制 (SVM) 模块获取脉宽调制 (PWM) 信号。
- QEP 接口 :它与编码器接口以获得转子的机械位置并将其传递给其他块。
- 速度/位置估计块 :顾名思义,获取转子位置和速度的计算在此块中执行。
- PID 控制 :比例积分微分 (PID) 是一种控制回路,它依赖于电机以转矩形式的反馈。通过计算所需扭矩与从 Park 变换块接收到的扭矩之间的差异,进行修正。
- 克拉克变换 :克拉克变换模块使用克拉克变换公式将定子电流 (ia, ib) 转换为磁通和扭矩 (d-q) 坐标系。将三相系统的静止参考系转化为静止参考系中的二象限系统。
- Park 变换和 Park 逆变换 :此块使用具有正交轴的两相系统将静止参考系转换为旋转参考系。正交分量是 d-q,分别是电机直轴和交轴。当定子输出电压必须转换回静止坐标系(定子参考)时,逆帕克变换模块就会出现。
- 空间矢量调制 :这是一种确定要应用于电机的 PWM 信号的技术。 SVM 以定子电压矢量为输入,产生三相输出电压作为输出。
接下来,我们将探讨如何将这些组件用于使用 FOC 算法驱动电机。
FOC 工作流程视图
对于要控制的三相电动机,我们必须通过读取相电流 Ia、Ib、Ic 为电动机提供适当的电压。如果不对它们进行控制,就不可能创建与转子磁通矢量成 90 度的定子磁通矢量。
FOC 是一种数学密集型算法,有助于轻松实现这一点,但开发 FOC 非常复杂。 FOC 算法能够通过将三相正弦电流参考系分解为磁通和转矩 (d-q) 参考系来简化对三相正弦电流参考系的控制。这两个组件可以单独控制。
图 1 显示了确定转子位置并将其传递到速度/位置块的编码器/霍尔。该值也被馈送到 Park 和逆 Park 变换块。同时,来自电机的相电流 (ia, ib) 被馈送到 Clarke 转换块。来自电机的相电流通过克拉克变换转换为两个正交电流 (iα, iβ)。新转换的相电流现在分别表示产生转矩和产生磁通的电流。虽然我们已经成功地将相电流分解为磁通和转矩分量,但它们仍然是正弦波,随着它们不断变化,很难控制。
FOC 算法的下一个任务是消除正弦波,这需要一个重要的输入——转子位置。我们在图中看到,这个值也被馈送到 Park-transform 块。在这个模块中,技巧是从静止参考系(从定子的角度)移动到从转子的角度看的旋转参考系。简单来说,Park 变换模块将两个交流电流(iα、iβ)转换为直流电流。这使得 PID 块可以很容易地按照它希望的方式对其进行控制。
现在让我们将 PID 块带入图片中。从 FOC 模块到 PID 模块的输入是 Iq 和 Id、转矩和磁通分量。在 EV 环境中,当驾驶员操作油门时,PID 模块将接收速度参考。 PID 块现在比较两个值并计算误差。此错误是 PID 块必须旋转电机的值。 PID 模块给出的输出是 Vq 和 Vd。该输出到达逆克拉克和帕克变换,在那里发生与克拉克和帕克变换完全相反的事情。逆 Park 变换模块将旋转参考系转换为静止参考系,以便电机的相位可以换向。
点击查看全尺寸图片
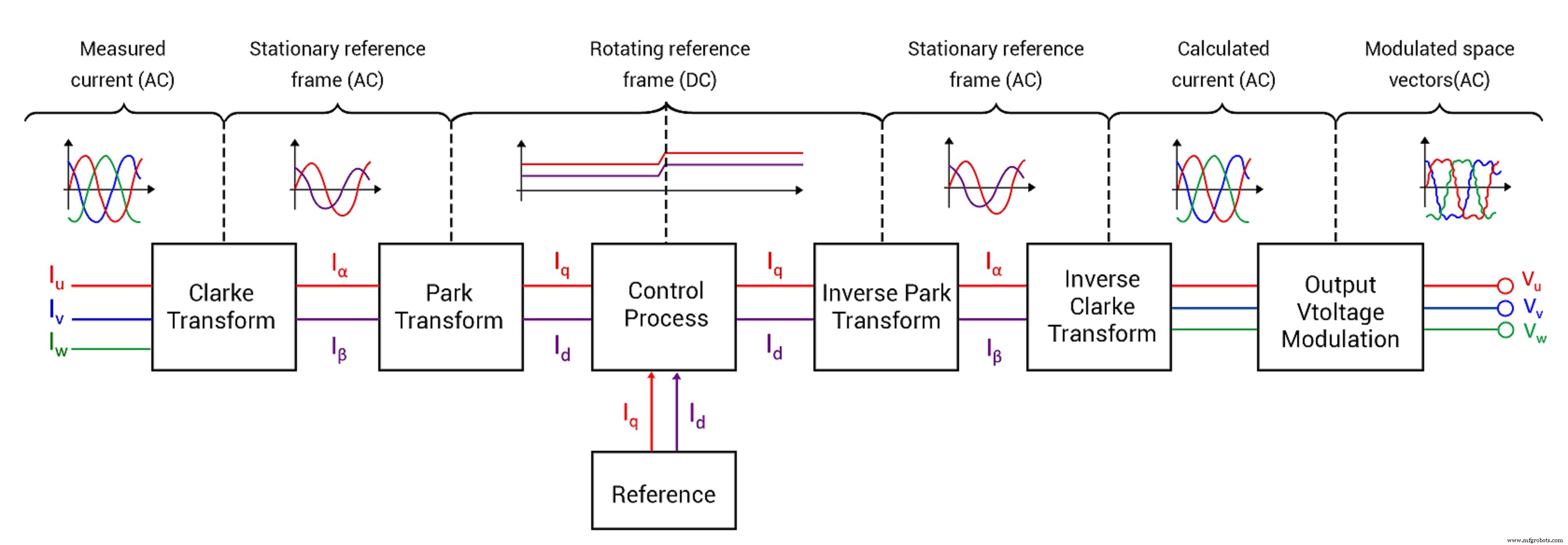
图 2:PID 的输出到达逆克拉克和帕克变换,其中发生与克拉克和帕克变换完全相反的过程。资料来源:德州仪器
在基于 FOC 算法的电机控制的最后一步中,空间矢量调制 (SVM) 的作用非常重要。 SVM 的作用是产生馈入逆变器的 PWM 信号,逆变器反过来产生驱动电机的三相电压。在某种程度上,SVM 也完成了逆克拉克变换的工作。
三相逆变器有六个晶体管,用于向电机提供输出电压。基本上有两种状态,其中这些输出必须是顶部晶体管关闭和底部晶体管打开,反之亦然。有两个状态和三个输出,总共八个状态(2 3 ) 可以计算。当您在六角星图上绘制这八个状态(也称为基向量)时,您会发现每个相邻向量的相位差为 60 度。 SVM 找到给出输出电压 (Vout ) 的平均向量。
事实上的电动汽车电机控制
FOC 作为电机控制方案对于 EV 设计是必不可少的。凭借 EV 所要求的那种无噪音且平稳的电机运行,FOC 非常适合。许多 OEM 和控制系统开发人员经常调整标准 FOC 算法以适应其 EV 项目的独特要求,但核心概念保持不变。
汽车级 MCU 的进步,例如 Microchip 的 PIC18Fxx39 系列微控制器或 TI 的 C2000 实时微控制器,能够加快电动汽车电机控制系统 FOC 算法的开发。
>> 本文最初发表在我们的姊妹网站 EDN .
 Vaibhav Anand 是 Embitel 的数字营销主管。
Vaibhav Anand 是 Embitel 的数字营销主管。  Saurabh S. Khobe 是 Embitel 的嵌入式工程师。
Saurabh S. Khobe 是 Embitel 的嵌入式工程师。
相关内容:
- 解决确定性多轴电机控制设计挑战
- 安全控制电动汽车牵引逆变器
- 新兴解决方案增强了电动汽车的电源管理
- 确定电子电气开发的要求
- 电机控制器集成了 Arm Cortex-M0 内核
有关 Embedded 的更多信息,请订阅 Embedded 的每周电子邮件通讯。
嵌入式