

LVDT 解调:整流器类型与同步解调
了解两种解调方法的比较:同步解调和整流型解调。在这里,我们将讨论每种方法的优点、缺点和适当的应用。
在上一篇文章中,我们讨论了二极管整流器解调器的操作和挑战。在本文中,我们将首先了解一般整流器型解调器的局限性。然后,我们将看到同步解调器可以解决其中的一些问题。最后,我们将看看 LVDT 应用中同步解调的缺点。
整流型解调器的局限性
尽管精密整流器可以解决简单二极管整流器的挑战,但整流器型解调器通常有几个缺点。对于整流器型解调器,我们需要访问 LVDT 次级的中心抽头,以对每个次级绕组两端的电压进行整流。因此,此类解调仅适用于 5 线 LVDT(图 1(b))。
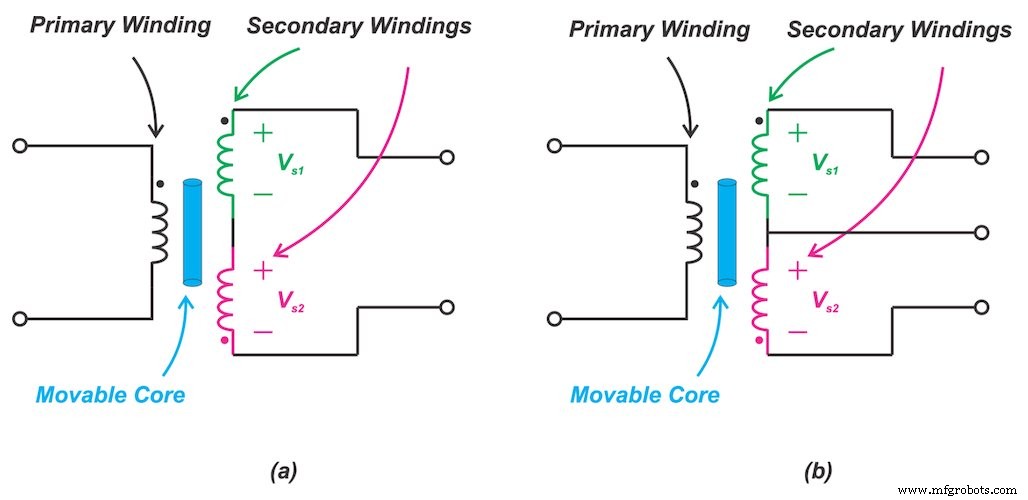
图 1. (a) 4 线和 (b) 5 线 LVDT。
还有其他解调方法不需要访问中心抽头,可以通过处理两个次级之间的电压差来确定磁芯位置。这些解调器允许我们使用 4 线 LVDT,如图 1(a) 所示。
拥有最少数量的电气连接真的很重要吗?
在许多应用中,调节电路位于离传感器很远的地方。一个很好的例子是在放射性应用的恶劣环境中进行测量,其中调节电路应放置在安全区域,甚至距离 LVDT 最远可达数百米。在这些情况下,通过 5 线配置远距离传输两个次级电压可能具有挑战性。由于调节模块位于远离 LVDT 的位置,因此需要具有低分布电容的良好平衡布线。这意味着布线成本的大幅增加。
整流器型解调器的另一个缺点是其噪声抑制能力有限。考虑一个 LVDT 传感器,其磁芯位移遵循 250 Hz 的正弦波形。图 2 中的红色曲线显示了使用典型二极管整流器获得的该 LVDT 的解调输出。
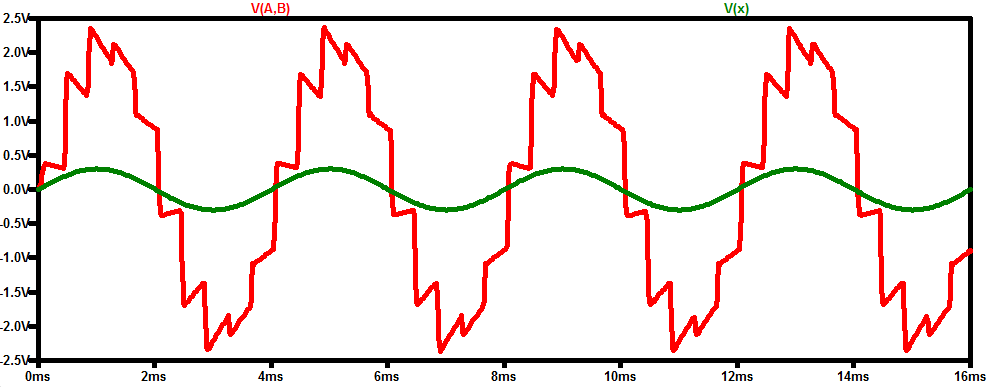
图 2.
在此图中,绿色曲线显示核心位移 x。如您所见,输出信号看起来像 x 的放大版本,只是它有一些对应于某些高频分量的突变。
为了去除这些不需要的高频分量,我们可以使用截止频率略高于系统机械带宽 (250 Hz) 的低通滤波器。因此,即使使用理想的低通滤波器,所有高达 250 Hz 的频率分量都将通过滤波器而不会衰减。因此,任何耦合到传感器输出的低于 250 Hz 的噪声分量也会出现在解调器输出上。
低噪声性能是整流型解调器的主要缺点。对于长电缆,这种限制变得更加明显。噪声性能以及 5 线配置要求使该电路不适合连接到远程位置的长电缆。下面讨论的同步解调可以解决这两个问题。
同步解调
考虑图 3 所示的 LVDT。假设我们有 \[V_{EXC} =A_p\cos(2\pi \times f_p \times t)\]。
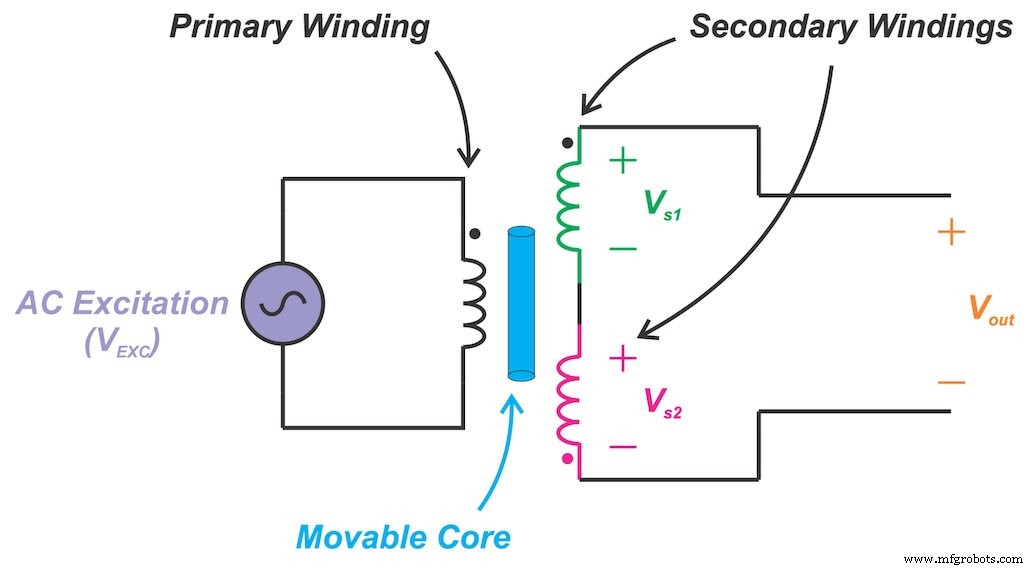
图 3。 LVDT 示例
差分输出(\[V_{out}\])是一个调幅信号,可以表示为:
\[V_{out} =A_s \times x \times \cos(2\pi \times f_p \times t + \phi)\]
等式 1.
其中 x 是核心位移,\[A_s\] 是一个比例因子,给出给定 x 的整体输出幅度。相位项 \[\phi\] 是由初级和次级电压之间的 LVDT 引起的相位差。理想情况下,此相移应该非常小,尤其是在制造商提供的特定频率附近。但是,我们通常需要考虑这种相移。
同步解调技术将 LVDT 差分输出乘以激励信号(或通常与激励信号同步的信号)。这给出了:
\[V_{demod} =V_{out} \times V_{EXC} =A_s \times x \times \cos(2\pi \times f_p \times t + \ phi) \times A_p\cos(2\pi \times f_p \times t)\]
等式 2。
简化为:
\[V_{demod} =\frac{1}{2} \times A_s \times x \times A_p [\cos(\phi) + \cos(2\pi \times 2f_p \times t + \phi)]\]
括号内的第一项是直流,然而,第二项是激励频率的两倍。因此,窄低通滤波器可以去除第二项,我们有:
\[V_{filtered} =\frac{1}{2} \times A_s \times x \times A_p\cos(\phi)\]
等式 3。
这给了我们一个与磁芯位移 x 成正比的直流电压。
乘以方波的同步解调
我们可以使用模拟乘法器将 LVDT 输出乘以激励正弦波(公式 2);然而,模拟乘法器价格昂贵且具有线性限制。我们可以将信号乘以与激励输入同步的方波,而不是乘以正弦波。
您可能想知道如何使用方波代替正弦波?在 ±1 之间切换的方波可以表示为方波频率奇次谐波处的正弦曲线的无限和。因此,频率为\[f_p\]的方波可以表示为:
\[v_{squarewave}(t) =\sum_{n=1, 3, 5}^{\infty}\frac{4}{n\pi}\sin (2\pi \times nf_p \times t)\]
当 LVDT 输出(\[f_p\] 处的正弦曲线)乘以方波时,方波的基本分量 \[(\frac{4}{\pi}\sin(2\pi \times f_p \时间 t))\] 在 \[2f_p\] 处产生直流分量和高频分量。如前一节所述,高频分量将被低通滤波器抑制,而所需的直流分量将出现在输出端。
乘以方波的高次谐波将产生 \[f_p\] 偶数倍的高频分量。因此,直流分量是唯一出现在滤波器输出端的分量,就像将信号乘以正弦波的情况一样。乘以方波的主要优点是可以大大简化解调器的电路实现。
同步解调器的电路实现
基于方波的同步解调器如图4所示。
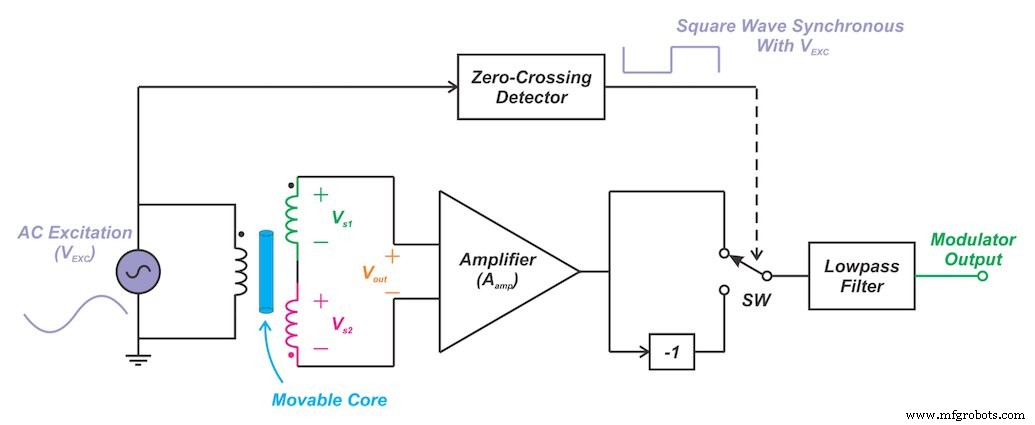
图 4。 一种基于方波的同步解调器
在这种情况下,LVDT 输出的放大版本乘以方波而不是激励正弦波。方波与激励输入同步,通过“过零检测器”获得,如上图所示。
为了与方波进行乘法运算,信号链的增益在\[±A_{amp}\](\[A_{amp}\] 是放大器增益)之间周期性变化。请注意,较低的路径包含 -1 的增益。这是通过使用方波驱动开关 SW 来实现的,该开关改变了上下路径之间的信号路径。这实际上等效于将放大器输出乘以方波。
最后通过低通滤波器保持输出的直流项,抑制高频成分。
LVDT 同步解调器的优点
同步解调的主要优点是其噪声性能。如上所述,同步解调将 LVDT 输出频移至直流,并使用低通滤波器保持此直流分量。低通滤波器将抑制其通带外的所有噪声分量。
由于我们想要的信号是直流,我们可以使用窄的低通滤波器。这将限制系统带宽并允许解调器显着抑制耦合到 LVDT 输出的大部分噪声。此外,通过同步解调,我们可以使用4线LVDT。
LVDT 同步解调器的缺点
尽管与整流器型解调器相比,同步解调可以提供更高的抗噪能力,但其输出取决于激励电压的幅度(公式 3 中的\[A_p\])。因此,对于同步解调,激励输入的幅度稳定性至关重要。
另一个问题是解调器输出取决于 LVDT 传递函数的相移(公式 3 中的 \[\cos(\phi)\])。理想情况下,该相移应该非常小;然而,它不是恒定的,会随着工作点的变化而变化。实用的解调器电路通常采用相位补偿网络来调整产生的方波的相位。补偿网络会增加解调器的复杂度。
然而,与整流器型解调器相比,这种增加的复杂性使得该电路适用于相对较长的电缆。这是因为可以使用相移项\[\phi\] 来考虑布线引起的延迟。因此,相位补偿电路也可用于补偿电缆延迟,使电路适用于较长的电线。
其他解调技术
同步解调提供更高的抗噪性,并且只需要四个电气连接;然而,它有其自身的局限性,例如依赖于激励输入的幅度以及相移问题。为了解决这些问题,还有其他几种解调技术。这些技术通常采用比率测量概念和基于 DSP 的方法来规避同步解调器的限制。
有关同步解调应用于其他传感器类型时的更详细讨论,请参阅以下文章:
- 同步解调简介
- 使用模拟乘法器的同步解调与基于开关的乘法器
- 同步解调器的模拟和数字实现
要查看我的文章的完整列表,请访问此页面。
物联网技术
- 开放式 DDS 与 RTI DDS 软件
- 明日自动驾驶汽车内部:从概念验证到现实
- DDS 安全硬件(硬件)方式 - SGX 第 3 部分:强化 DDS 服务
- DDS Security the Hard(ware) Way - SGX:Part 2 (Micro + Security + SCONE)
- DDS 安全硬件(硬件)方式 - SGX:第 1 部分(概述)
- MQTT 和 DDS:物联网中的机器对机器通信
- 什么是工业物联网?工业物联网入门
- RTI的软件测试
- Connext DDS 的 Telegraf 插件:使用 DDS 和 InfluxDB 构建时间序列监控系统
- Connext 6:现在可用!
- Connext DDS 和工业物联网:需要了解的前 5 件事
- CNC 车床采用同步主轴技术