

Selsyn(同步)电机
通常情况下,绕线转子感应电动机的转子绕组在启动后会短路。在启动期间,可以将电阻与转子绕组串联以限制启动电流。如果这些绕组连接到一个共同的启动电阻,两个转子将在启动过程中保持同步。
这对于印刷机和吊桥很有用,其中两个电机在启动期间需要同步。一旦启动,转子短路,同步转矩就消失了。启动时电阻越大,一对电机的同步转矩越大。
如果移除了启动电阻,但转子仍然并联,则没有启动转矩。然而,存在相当大的同步转矩。这称为 selsyn ,是“自同步”的缩写。
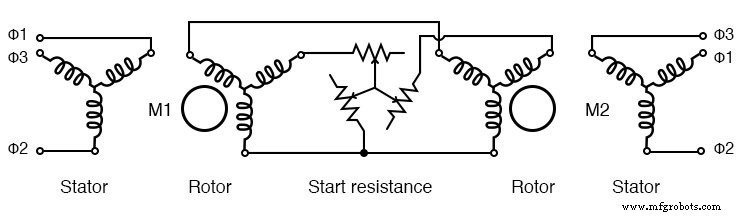
从普通电阻启动绕线转子感应电机
转子可以是静止的。如果一个转子移动一个角度 θ,另一个自同步轴将移动一个角度 θ。如果对一个 selsyn 施加阻力,则在尝试旋转另一个轴时会感觉到这种情况。
虽然存在多马力(多千瓦)selsyns,但主要应用是仪表应用的几瓦小单位——远程位置指示。
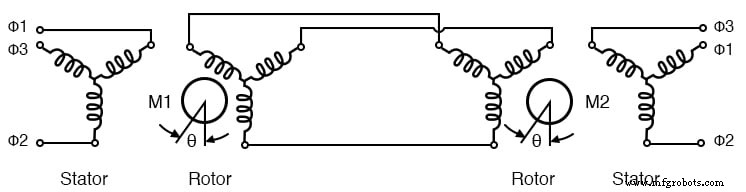
Selsyns 无启动阻力
仪表 selsyns 没有用于启动电阻器(上图)。它们不打算自旋转。由于转子没有短路,也没有加载电阻,因此没有启动转矩。
然而,手动旋转一根轴会导致转子电流不平衡,直到并联单元的轴跟随。请注意,两个定子均采用公共三相电源。虽然我们上面展示的是三相转子,但单相动力转子就足够了,如下图所示。
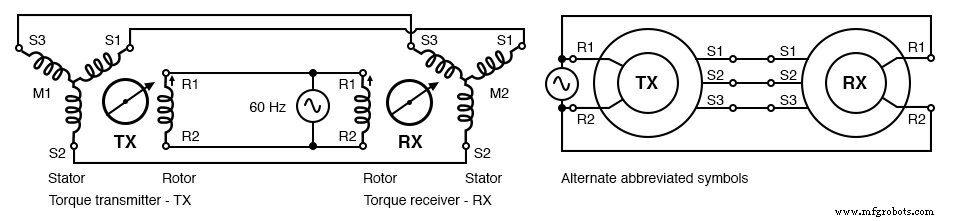
发射器 - 接收器
小型仪器 selsyns,也称为 synchros , 使用单相并联交流通电转子,保留三相并联定子,定子不从外部通电。下图是旋转变压器的同步功能。
如果两个扭矩传感器的转子 (TX) 和扭矩接收器 (RX) 角度相同,定子感应电压相位相同,无电流流过。
如果一个转子与另一个转子发生位移,则发送器和接收器之间的定子相电压将不同。定子电流将流过产生扭矩。接收器轴电气从动于发射器轴。可以旋转发射器或接收器轴来转动对面的装置。
同步器具有单相动力转子
同步定子缠绕有引出到外部端子的 3 相绕组。扭矩发送器或接收器的单转子绕组由拉丝滑环引出。同步发射器和接收器在电气上是相同的。
然而,同步接收器具有内置的惯性阻尼。同步扭矩传感器可以代替扭矩接收器。
远程位置传感是主要的同步应用。例如,耦合到雷达天线的同步发射器在控制室的指示器上指示天线位置。
耦合到风向标的同步发射器在远程控制台指示风向。 Synchros 可用于 240 Vac 50 Hz、115 Vac 60 Hz、115 Vac 400 Hz 和 26 Vac 400 Hz 电源。
同步应用:远程位置指示
差分收发器
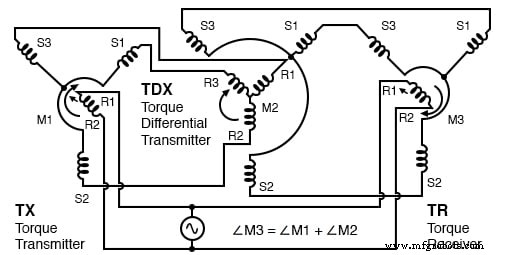
同步差分发送器 (TDX) 具有三相转子和定子。同步差动变送器将轴角输入与转子输入上的电角输入相加,在定子输出上输出总和。
该定子电角度可以通过将其发送到 RX 来显示。例如,同步接收器显示雷达天线相对于船首的位置。通过同步差分发射器增加船舶罗盘航向,在 RX 上显示相对于真北的天线位置,无论船舶航向如何。
在 TX 和 TDX 之间反转 S1-S3 定子引线对减去角位置。
扭矩差动发送器 (TDX)
耦合到同步发射器的舰载雷达天线对相对于船首的天线角度进行编码(下图)。需要显示相对于真北的天线位置。
我们需要添加从陀螺罗盘航向到船首相对天线位置的船舶,以显示相对于真北的天线角度(∠antenna + ∠gyro)。
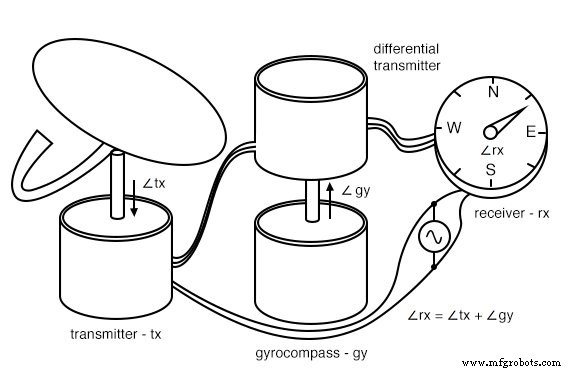
扭矩差动变送器应用:角度相加
∠天线-N =∠天线 + ∠陀螺 ∠rx =∠tx + ∠gy
例如,船舶航向为∠30°,天线相对于船首的位置为∠0°,∠antenna-N为:
∠rx =∠tx + ∠gy ∠30° =∠30° + ∠0°
例如,船舶航向为∠30°,天线相对于船首的位置为∠15°,∠antenna-N为:
∠45° =∠30° + ∠15°
加法与减法
作为参考,我们展示了使用 TDX(扭矩差分发送器)和 TDR(扭矩差分接收器)进行轴角相减和相加的接线图。 TDX在轴上有扭矩角输入,在三个定子连接上有一个电角输入,在三转子连接上有一个电角输出。
TDR 在定子和转子上都有电角度输入。角度输出是 TDR 轴上的扭矩。 TDX和TDR的区别在于TDX是扭矩传递器,TDR是扭矩接收器。
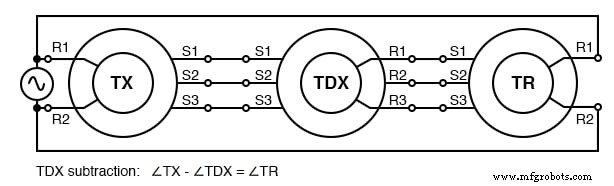
TDX 减法
扭矩输入为 TX 和 TDX。扭矩输出角差为TR。
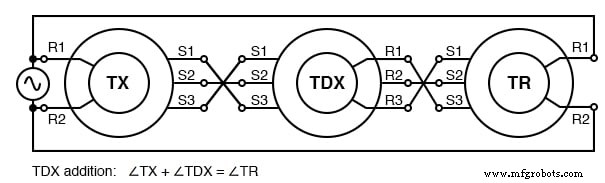
TDX 添加
扭矩输入为 TX 和 TDX。扭矩输出角和为TR。
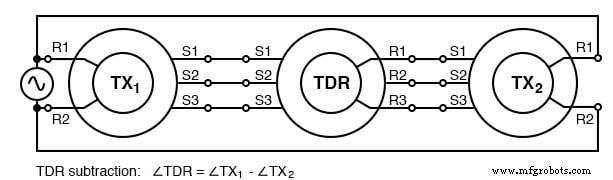
TDR 减法
扭矩输入为 TX1 和 TX2。扭矩输出角差为TDR。
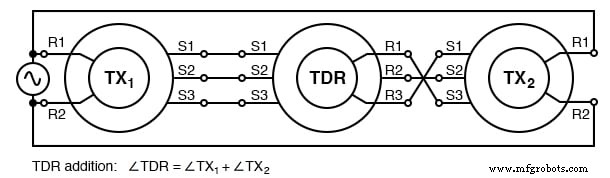
TDR 添加
扭矩输入为 TX1 和 TX2。扭矩输出角和为TDR。
控制变压器
同步发射器的一个变体是控制变压器 .它与 TX 一样具有三个等距的定子绕组。它的转子比发射器或接收器缠绕的圈数更多,以使其在旋转时更灵敏地检测零点,通常由伺服 系统。
当 CT(控制变压器)转子输出与定子磁场矢量成直角时,它的输出为零。与 TX 或 RX 不同,CT 既不传输也不接收扭矩。它只是一个灵敏的角位置检测器。
控制变压器(CT)检测伺服空
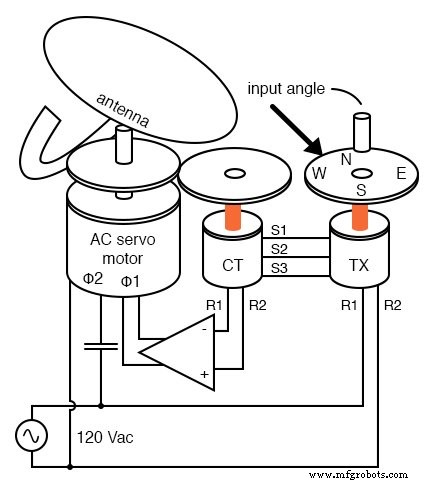
在上图中,TX 的轴被设置到雷达天线的所需位置。伺服系统将使伺服电机驱动天线到指令位置。 CT 将指令与实际位置进行比较,并向伺服放大器发出信号以驱动电机,直到达到指令角度。
Servo 使用 CT 感测天线位置 null
当控制变压器转子在 90° 处检测到零位时 到定子磁场的轴线,没有转子输出。任何转子位移都会产生与位移成正比的交流误差电压。
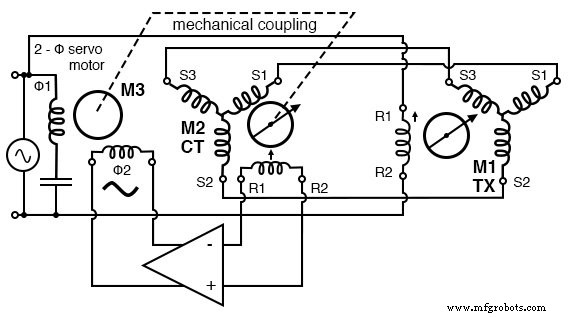
伺服 试图将由于负反馈引起的命令变量和测量变量之间的误差最小化。控制变压器将轴角与TX定子发送的定子磁场角进行比较。
当它测量到最小值或零点时,伺服驱动天线和控制变压器转子到指令位置。测量位置与指令位置无误差,无CT输出放大。
伺服电机 ,一个两相电机,停止旋转。但是,任何 CT 检测到的错误都会驱动驱动电机的放大器,直到错误最小化。这对应于伺服系统已驱动天线耦合 CT 以匹配 TX 命令的角度。
伺服电机可以驱动减速齿轮系,并且与 TX 和 CT 同步器相比更大。然而,交流伺服电机的低效率将它们限制在较小的负载上。它们也很难控制,因为它们是恒速设备。
但是,可以通过改变一相的电压与另一相的线电压来在一定程度上控制它们。大型直流伺服电机更有效地驱动重负载。
机载应用使用 400Hz 组件——TX、CT 和伺服电机。交流磁性元件的尺寸和重量与频率成反比。因此,将 400 Hz 组件用于飞行器应用,例如移动控制面,可以节省尺寸和重量。
解析器
解析器 (下图)有两个定子绕组放置在 90° 相互之间,以及由交流电驱动的单个转子绕组。旋转变压器用于极坐标到矩形的转换。转子轴上的角度输入会在定子绕组上产生直角坐标 sinθ 和 cosθ 成比例的电压。
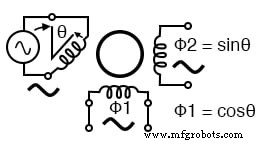
解析器将轴角转换为角度的正弦和余弦
例如,雷达内的黑匣子将到目标的距离编码为正弦波比例电压 V,方位角为轴角。转换为 X 和 Y 坐标。正弦波被馈送到旋转变压器的转子。轴承角轴连接到旋转变压器轴。坐标 (X, Y) 在旋转变压器定子线圈上可用:
X=V(cos(∠bearing)) Y=V(sin(∠bearing))
笛卡尔坐标 (X, Y) 可以绘制在地图显示上。 TX(扭矩发送器)可用作解析器。

Scott-T 将 3-φ 转换为 2-φ,使 TX 能够执行解析器功能
可以使用 Scott-T 从同步发射器中导出类似旋转变压器的正交角分量 变压器。三个 TX 输出,三相,由 Scott-T 处理 变压器转换成一对正交元件。还有一个线性版本的解析器,称为感应同步器。 inductosyn 的旋转版本 具有比解析器更精细的分辨率。
总结:Selsyn(同步)电机
- 一个同步 ,也称为 selsyn , 是用于传递轴扭矩的旋转变压器。
- 一个 TX,扭矩发送器 , 在其轴上接受扭矩输入,以在三相电输出上进行传输。
- 一个 RX,扭矩接收器 , 接受角度输入的三相电气表示,以在其轴上转换为扭矩输出。因此,TX 将扭矩从输入轴传输到远程 RX 输出轴。
- 一个 TDX,扭矩差动发送器 , 将电角输入与轴角输入相加,产生电角输出
- TDR,扭矩差分接收器, 将两个电角输入相加,产生一个轴角输出
- A CT,控制变压器 , 当转子与定子角度输入成直角时检测到零点。 CT 通常是伺服反馈系统的一个组件。
- 一个解析器 输出轴角输入的正交 sin(θ) 和 cos(θ) 表示,而不是三相输出。
- TX 的三相输出由 Scott-T 变压器转换为旋转变压器式输出 .
工业技术