

同步电机
单相同步电机
单相同步电机有小尺寸可供选择,适用于需要精确计时的应用,例如计时、(时钟)和磁带播放器。尽管电池供电的石英调节时钟随处可见,但交流线路操作的时钟具有更好的长期精度——超过几个月。
这是由于发电厂运营商有意保持交流配电系统频率的长期准确性。如果它落后几个周期,他们将弥补AC丢失的周期,使时钟不浪费时间。
大型与小型同步电机
超过 10 马力 (10 kW) 时,更高的效率和领先的功率因数使大型同步电机在工业中非常有用。大型同步电机比更常见的感应电机效率高几个百分点,但同步电机更复杂。
由于电动机和发电机在结构上相似,因此应该可以将发电机用作电动机,反之,将电动机用作发电机。
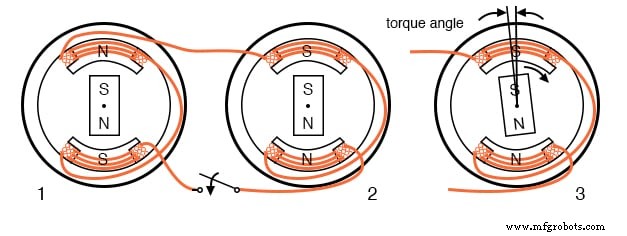
异步电动机类似于具有旋转磁场的交流发电机。下图显示了带有永磁旋转场的小型交流发电机。下图可以是两台并联同步的由机械能源驱动的交流发电机,也可以是一台驱动同步电机的交流发电机。或者,如果连接外部电源,也可以是两个电机。
关键是在任何一种情况下,转子都必须以相同的标称频率运行,并且彼此同相。也就是说,它们必须同步 .同步两台交流发电机的程序是:(1) 打开开关,(2) 以相同的转速驱动两台交流发电机,(3) 提前或延迟一台发电机的相位,直到两个交流输出同相,(4) 关闭在它们偏离相位之前切换。
一旦同步,交流发电机将相互锁定,需要相当大的扭矩才能使一个单元与另一个单元松脱(不同步)。
同步电机与发电机同步运行
用同步电机计算扭矩
如果在旋转方向上向上述旋转交流发电机之一的转子施加更大的扭矩,则转子的角度将相对于定子线圈中的磁场提前(与(3)相反),同时仍保持同步,并且转子将像交流发电机一样向交流线路输送能量。
转子也将相对于另一个交流发电机中的转子前进。如果对上述单元之一施加诸如制动器之类的负载,则转子的角度将滞后于定子磁场,如(3)所示,从交流线路中提取能量,就像电动机一样。
如果施加过大的扭矩或阻力,转子将超过最大扭矩角 提前或滞后太多以至于失去同步。只有在保持电机同步时才会产生转矩。
同步电机加速
在用小型同步电机代替交流发电机的情况下,无需为交流发电机进行复杂的同步程序。然而,同步电机不是自启动的,在它锁定(同步)到发电机转速之前,仍必须达到近似的交流发电机电气速度。
一旦达到速度,同步电机将与交流电源保持同步并产生转矩。
正弦波驱动同步电机
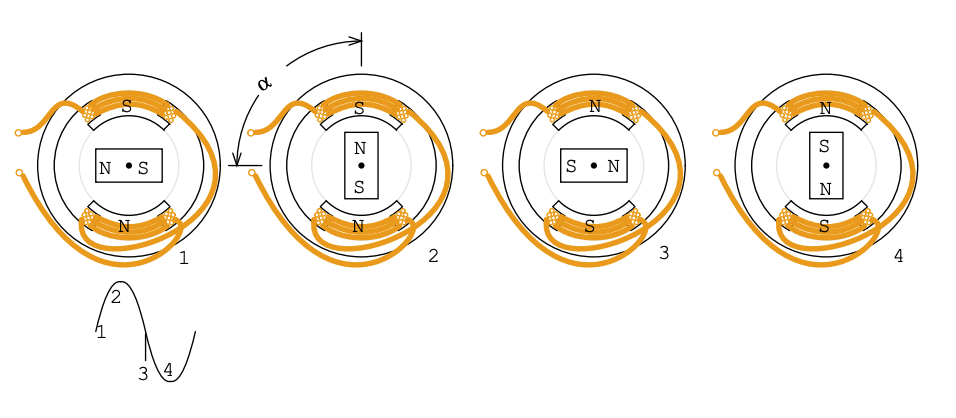
假设电机达到同步转速,当正弦波在上图(1)中变为正时,下方的北线圈推动北转子极,而上方的南线圈则吸引转子北极。同理,转子南极被上层南极线圈排斥而被下层北极线圈吸引。
当正弦波在 (2) 处达到峰值时,保持转子北极向上的扭矩最大。该转矩随着正弦波在 (3) 处减小到 0 VDC 而减小,且转矩最小。
当正弦波在 (3&4) 之间变为负值时,较低的南线圈推动南转子极,同时吸引北转子极。以类似的方式,北转子极被上北线圈排斥并被吸引到下南线圈。在 (4) 处,正弦波达到负峰值,同时保持扭矩再次达到最大值。随着正弦波从负到 0 VDC 再到正,这个过程重复一个新的正弦波周期。
请注意,上图说明了空载条件下的转子位置(α=0°)。在实际操作中,加载转子会导致转子滞后角α所示的位置。该角度随着负载增加,直到在 α=90° 时达到最大电机扭矩。
超过这个角度就会失去同步和扭矩。单相同步电机线圈中的电流在极性交替时脉动。
如果永磁转子速度接近此交替的频率,则它与此交替同步。由于线圈磁场脉动且不旋转,因此必须使用辅助电机使永磁转子加速。这是一个类似于下一节中的小型感应电机。
添加场极降低速度
2 极(一对 N-S 极)交流发电机在以 3600 rpm(每分钟转数)旋转时会产生 60 Hz 的正弦波。 3600 rpm 对应于每秒 60 转。类似的2极永磁同步电机也会以3600转/分的速度旋转。
可以通过添加更多极对来构建低速电机。 4 极电机的转速为 1800 rpm,12 极电机的转速为 600 rpm。所示的结构样式(上图)仅用于说明。效率更高、扭矩更大的多极定子同步电机实际上在转子中有多个极。

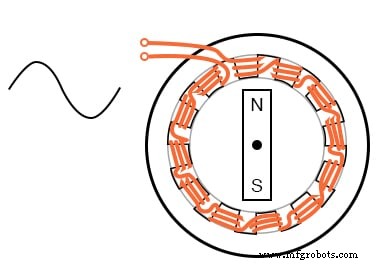
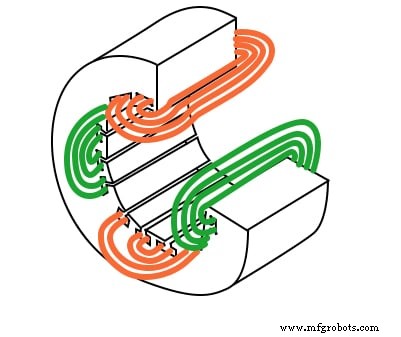
单绕组12极同步电机
对于 12 极电机,不是缠绕 12 线圈,而是缠绕带有十二个叉指钢极片的单个线圈,如上图所示。尽管线圈的极性因施加的交流电而交替,但假设顶部暂时为北,底部暂时为南。
极片将南通量从线圈的底部和外部路由到顶部。这些 6 向南与从线圈钢极片顶部向上弯曲的 6 向北接头交错。因此,永磁转子条在条形磁铁的一次物理旋转中将遇到对应于 6 个交流周期的 6 极对。
旋转速度将是交流电速度的 1/6。转子速度将是 2 极同步电机的 1/6。示例:60 Hz 会使 2 极电机以 3600 rpm 的速度旋转,或者 12 极电机以 600 rpm 的速度旋转。
经 www.clockHistory.com 上的 Westclox History 许可转载
定子(上图)显示了一个 12 极 Westclox 同步时钟电机。结构与上图类似,带有单个线圈。单线圈结构对于低扭矩电机来说是经济的。这个 600 rpm 的电机驱动减速齿轮移动时钟指针。
问: 如果 Westclox 电机使用 50 Hz 电源以 600 rpm 的速度运行,需要多少极?
答: 10 极电机将有 5 对 N-S 极。它将以 50/5 =10 转/秒或 600 rpm(10 s-1 x 60 s/分钟)的速度旋转。

经 www.clockHistory.com 上的 Westclox History 许可转载
转子(上图)由永磁棒和钢制感应电机杯组成。在极耳内旋转的同步电机棒保持准确的时间。条形磁铁外部的感应电机杯安装在用于自启动的凸片外部和上方。曾经生产过不带感应电机杯的非自启动电机。
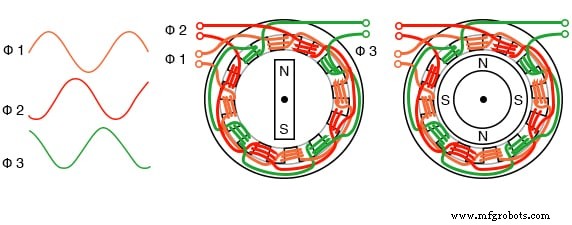
三相同步电机
如下图所示的三相同步电机在定子中产生旋转电场。如果使用工业环境中的固定频率电源(例如 50 或 60 Hz)启动,此类电机不会自启动。
此外,转子不是工业中使用的多马力(多千瓦)电机的永磁体,而是电磁体。大型工业同步电机比感应电机效率更高。当需要恒定速度时使用它们。具有超前功率因数,他们可以校正滞后功率因数的交流线路。
定子励磁的三相矢量相加以产生单个合成磁场,该磁场每秒旋转 f/2n 次,其中 f 是电源线频率,工业电源线操作的电机为 50 或 60 Hz。极数为n。对于以 rpm 为单位的转子速度,乘以 60。
S =f120/n 其中: S =转子速度,单位为 rpm f =交流线路频率 n =每相极数
3 相 4 极(每相)同步电机将以 1800 rpm 的 60 Hz 功率或 1500 rpm 的 50 Hz 功率旋转。如果线圈按φ-1、φ-2、φ-3的顺序一次通电一个,转子应依次指向相应的极。
由于正弦波实际上是重叠的,因此合成场将旋转,不是逐步旋转,而是平滑旋转。例如,当 φ-1 和 φ-2 正弦波重合时,场将处于指向这些极点之间的峰值。所示的条形磁铁转子仅适用于小型电机。
具有多个磁极的转子(右下方)用于驱动大量负载的任何高效电机。这些将是大型工业电机中的滑环馈电电磁铁。大型工业同步电机通过在电枢中嵌入鼠笼式导体自启动,充当感应电机。
电磁衔铁只有在转子达到接近同步转速后才通电。
三相四极同步电机
小型多相同步电机
小型多相同步电机可以通过将驱动频率从零斜升到最终运行频率来启动。多相驱动信号由电子电路产生,除最苛刻的应用外,在所有应用中都是方波。
这种电机被称为无刷直流电机。真正的同步电机由正弦波形驱动。通过在定子中提供适当数量的绕组,可以使用两相或三相驱动。上面只显示了三相。
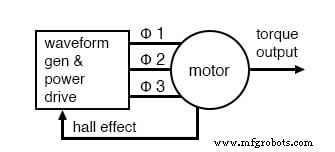
电子同步电机
框图显示了与低压 (12 V DC) 同步电机相关的驱动电子设备。这些电机有一个位置传感器 集成在电机内,提供频率与电机转速成正比的低电平信号。
位置传感器可以像固态磁场传感器一样简单,例如霍尔效应 为驱动电子设备提供换向(电枢电流方向)定时的设备。位置传感器可以是高分辨率角度传感器,例如旋转变压器、感应同步器(磁编码器)或光学编码器。
如果需要恒定且准确的旋转速度,(对于磁盘驱动器)转速计 和锁相环 可能包括在内(下图)。该转速计信号是一个与电机速度成正比的脉冲序列,被反馈到锁相环,该环将转速计频率和相位与稳定的参考频率源(如晶体振荡器)进行比较。
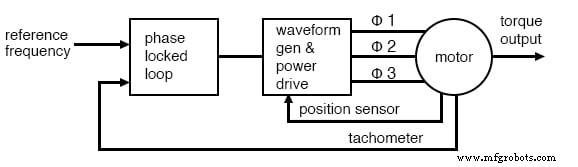
锁相环控制同步电机速度
无刷直流电机
由简单的霍尔效应传感器提供的方波电流驱动的电机被称为无刷直流电机 .这种类型的电机具有更高的纹波扭矩 通过轴旋转比正弦波驱动电机的变化。对于许多应用程序来说,这不是问题。不过,在本节中,我们主要对同步电机感兴趣。
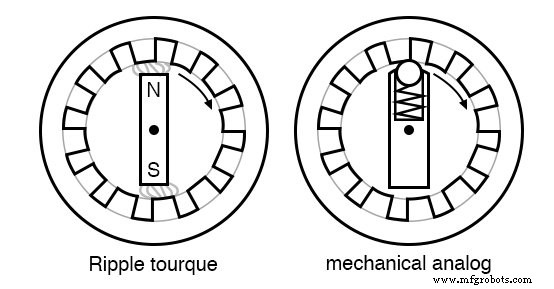
电机纹波转矩和机械模拟
纹波转矩或齿槽效应是由转子磁极对定子磁极片的磁力吸引引起的。 (上图)注意没有定子线圈。永磁转子可以用手转动,但靠近极片时会被极片吸引。
这类似于机械情况。对于磁带播放机中使用的电机,纹波转矩会成为问题吗?是的,我们不希望电机在将录音带移过磁带播放头时交替加速和减速。纹波转矩是否会成为风扇电机的问题?号
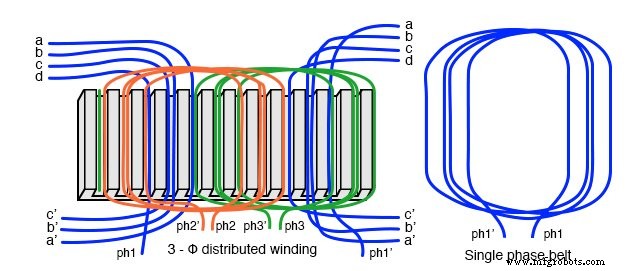
分布在皮带中的绕组产生更正弦的场
如果电机由与电机反电动势同步的电流正弦波驱动,则它被归类为同步交流电机,无论驱动波形是否由电子方式产生。同步电机将产生一个正弦反emf 如果定子磁场呈正弦分布。
如果磁极绕组分布在一条带上的多个槽中而不是集中在一个大磁极上(如我们的大多数简化插图中所画),则会更加正弦。这种安排消除了许多定子场奇次谐波。
在相绕组边缘具有较少绕组的槽可以与其他相共享空间。缠绕带可以采用交替的同心形式,如下图所示。
同心带
对于由正弦波驱动的两相电机,通过三角恒等式,扭矩在整个旋转过程中是恒定的:
sin2θ + cos2θ =1
与无刷直流电机中使用的霍尔效应传感器相比,驱动波形的生成和同步需要更精确的转子位置指示。 解析器 , 或 光学或磁性编码器 , 提供每转数百到数千个部分(脉冲)的分辨率。
旋转变压器以与轴角的正弦和余弦成正比的信号形式提供模拟角位置信号。编码器提供串行或并行格式的数字角度位置指示。
正弦波驱动实际上可能来自 PWM,脉宽调制器 ,一种用数字波形逼近正弦波的高效方法。每个相位都需要驱动电子设备来为这个波形进行适当的相位偏移。
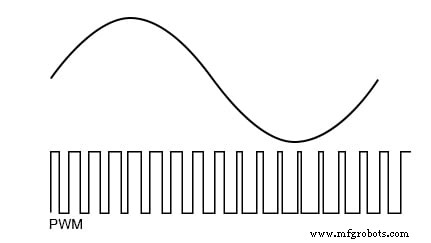
PWM 近似于正弦波
同步电机的优点
同步电机效率高于感应电机。同步电机也可以更小,尤其是在转子中使用高能永磁体的情况下。现代固态电子设备的出现使得以变速驱动这些电机成为可能。
感应电动机主要用于铁路牵引。然而,安装在驱动轮内的小型同步电机使其对此类应用具有吸引力。 高温超导 该电机的版本是铜绕电机重量的五分之一到三分之一。
最大的实验超导同步电机能够驱动海军驱逐舰级舰艇。在所有这些应用中,电子变速驱动器是必不可少的。变速驱动器还必须在低速时降低驱动电压,因为在较低频率时感抗会降低。
为了产生最大扭矩,转子需要滞后定子磁场方向 90°。再多,它就会失去同步。更少的结果会导致扭矩降低。因此,需要准确地知道转子的位置。并且需要计算和控制转子相对于定子磁场的位置。
这种类型的控制称为矢量相位控制 .它是通过一个快速微处理器驱动定子相位的脉宽调制器来实现的。同步电机的定子与比较流行的感应电机的定子相同。
因此,感应电机使用的工业级电子调速也适用于大型工业同步电机。如果将传统旋转同步电机的转子和定子展开,就会产生同步直线电机。
该类电机应用于精密高速直线定位。
相关工作表:
- 交流电机理论工作表
工业技术