

工业机器人的类型及其不同用途
发现多种类型的工业机器人及其独特的功能。清楚了解当今各类机器人的用途和应用:机械臂、移动机器人、空中无人机、水下机器人和协作机器人。
您如何决定适合哪种类型的工业机器人?
市场上有许多不同类型的机器人 - 您如何知道使用哪种类型?与许多设计和工程问题一样,“形式追随功能”。也就是说,需要哪种类型的机器人取决于其预期功能。机器人会固定在地板或其他表面上,还是需要移动?机器人每小时必须能够处理多少个单位?机器人必须举起的最大重量是多少?如果将机器人固定在一处,工作空间的尺寸是多少?工作信封是矩形还是圆形?回答这些问题将快速缩小您的选择范围,并让您能够根据自己的目的选择理想的工业机器人类型。
在本文中,我们将研究不同类型的机器人、它们的优点和缺点,以及如何确定它们的用途。
本文内容
- 固定机器人(机械臂)
- 自主移动机器人
- 飞行机器人(空中无人机)
- 水下机器人
- 如何为您的组织寻找理想的机器人类型
固定机器人(机械臂)
市场上有七种主要类型的固定式机器人。固定式是指用螺栓固定在地板、天花板或其他表面上的机器人——它们不能移动。通常,固定式机器人是设计用于拾取和放置、分类、组装、焊接和整理等任务的机械臂。
在这里,我们考虑不同类型的机械臂,以及它们的特性和用途。
- 铰接式机械臂
- 笛卡尔或矩形机器人
- SCARA 机器人
- 极地或球形机器人
- Delta 或并联机器人
- 龙门机器人
- 圆柱形
- 协作机器人/协作机器人
铰接式机械臂
优点: 所有机械臂类型中最灵活的运动。可以相当强大,能够举起重物。
缺点: 可能需要被围起来。比其他一些机械臂慢。比其他机械臂贵。需要更复杂的控制系统。
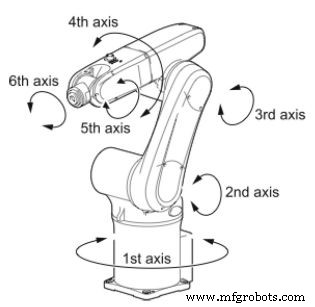
与其他类型的机器人手臂相比,铰接式机器人手臂的运动与人类手臂最为相似。典型的关节臂有六个轴或关节。它可能有更少或更多,具体取决于应用程序和制造商。机器人的关节越多,它的运动就越平滑,越不“像机器人”。这种运动灵活性由自由度描述。
有趣的事实: 人工手的设计者认为人手有 27 个自由度。人的手臂有 7 个自由度,人的手臂和手之间总共有 34 个自由度。
复制人类手臂和手可以移动的所有微妙方式对于工业机器人来说过于昂贵和复杂。人们普遍认为,工业机器人手臂的 6 个自由度足以让他们执行几乎任何需要的任务。
机器人不会弹钢琴,但它不需要!
根据应用的不同,机器人手臂可能配备一个抓手,相当于一只手的机器人。通常,机器人抓手比人手简单得多。有时它们可能像吸盘或电磁铁一样简单。或者,也许可以使用三指柔软的抓手来抓取精致的物体,例如新鲜农产品或鸡蛋。有许多不同类型的抓手,目前还没有发现可以处理所有应用的单一机器人抓手。
或者,所谓的臂端工具 (EoAT) 可以是某种工具,可能是一种旋转工具,可以固定钻头或其他类型的钻头,用于去毛刺、研磨或铣削。有很多可能性,包括用于焊接、喷漆、打磨、激光切割等的专用 EoAT。
铰接式机器人非常灵活,因为它们的所有关节都可以旋转,而不是线性或平移关节,后者只能沿直线移动。
铰接式机器人用于拾取和放置、弧焊、点焊、包装、机器管理和材料处理等应用。在难以触及的地方产生弧线(或类似图案)的能力使铰接式机器人成为汽车行业和其他需要这种能力的制造业的理想选择。
从历史上看,能够捡起重达一吨或更多物体的大型而强大的关节臂机器人没有配备传感器来感知周围环境。如果有人妨碍这样的机器人,他们可能会受到重伤甚至死亡。
因此,这样的机械臂需要被分隔成自己的空间。只有完全了解机器人功能的合格人员才能进入此类机器人运行的围墙或围栏空间。
但是,如果铰接式机械臂配备了合适的传感器和控制软件,它就可以在人周围安全地操作。例如,使用带有摄像头或 LiDAR 传感器的计算机视觉,如果这样的机器人感觉到有什么东西挡住了它的运动路径,或者甚至有人或物体正在接近但尚未挡道,机器人可以减速或停止。其他传感器可以检测到碰撞——如果手臂撞到什么东西,它会停止和/或逆转。通常,可以安全地与人一起操作的关节臂被设计为限制他们的速度和力量。
笛卡尔或矩形机器人
优点: 简单的控制系统。根据型号的不同,可以举起非常重的物体。准确的。在所有三个轴上都是刚性的。比关节臂便宜。
缺点: 不能做旋转运动。
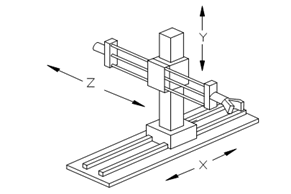
这些机器人使用笛卡尔坐标系(X、Y 和 Z)沿三个轴(前后、上下和左右)进行线性运动。所有三个关节都是平移的,这意味着关节的运动仅限于直线运动。这就是为什么这种机器人也被称为“线性”机器人。
笛卡尔机器人可用于取放、物料搬运、包装自动化、存储和检索、切割和钻孔以及更多应用。
它们在所有三个维度上都是刚性的,这使得它们非常准确和可重复。它们比关节式机械臂更简单,具有更简单的软件控制,并且可能更便宜,具体取决于应用。
龙门机器人 - 一种笛卡尔机器人
优点: 根据型号的不同,可以举起非常重的物体。如果需要,可以做得非常大,跨越设施的整个长度。对于正确的应用程序来说非常具有成本效益。
缺点: 不能做旋转运动。

直角坐标或线性机器人可以配置为龙门机器人。龙门机器人沿着高架轨道移动。根据其设计,龙门机器人可以处理非常重的负载并快速准确地移动它们。如果需要,它们也可以做得非常大,覆盖设施的整个地面空间。较小的龙门机器人可用于拾放和其他涉及高精度和良好刚性的操作。
由于线性机器人的运动控制方面相对简单,因此其成本通常低于其他类型的机器人,可以成为许多自动化任务的高性价比解决方案。
笛卡尔机器人的工作包络是矩形的。添加垂直移动意味着工作信封是一个盒子的形状。
SCARA 机器人
优点: 非常适合许多装配应用。快速准确。具有成本效益的装配操作。
缺点: 不如关节臂灵活。不如笛卡尔臂准确。不如Delta机器人手臂快。
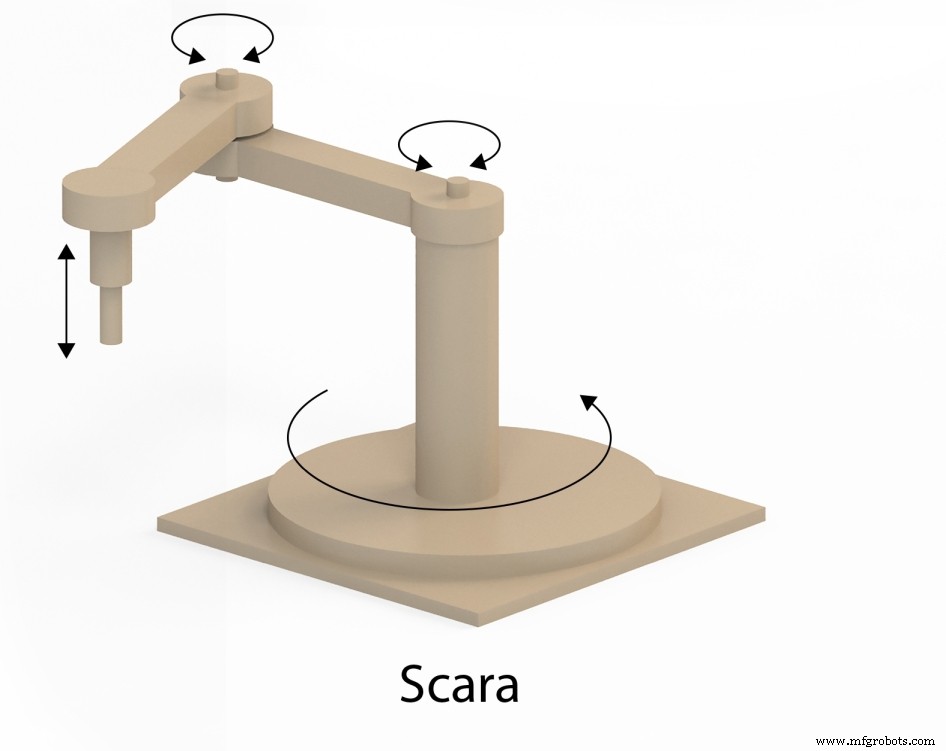
SCARA 机器人(Selective Compliance Assembly Robot Arm)与笛卡尔机器人相似,它们在 3 个关节或轴上移动。然而,与笛卡尔机器人相比,SCARA 机器人的两个关节是旋转的。因此,它们能够进行比笛卡尔机器人更复杂的运动。它们通常速度更快,运动更灵活,但不如笛卡尔机器人精确。
有趣的事实: SCARA 机器人的广泛使用彻底改变了小型电子行业。由于其占用空间小、简单和设计特点,它们非常适合这一应用领域,并且已被证明具有很高的成本效益。
顾名思义,SCARA 机器人手臂是为装配应用而发明的。 SCARA 机器人由日本山梨大学的 Hiroshi Makino 于 1981 年创建。名字中的“顺从”是指一定数量的“给予”。也就是说,如果你在水平面上推动一个 SCARA 机器人,它会产生一点点 - 它会移动,它不是完全刚性的。但是,在垂直平面上,SCARA 机器人是相当刚性的,向这个方向推动它不会“屈服”。因此,它具有“选择性”依从性。它在水平平面上是顺应的,而不是在垂直平面上。
例如,在需要将零件插入电路板的装配操作中,选择性顺从性非常有用。这种装配通常需要将零件装入孔中。将零件居中放入孔中通常需要一点“合规性”才能找到中心点 - 稍微晃动一下,或者一点点“让步”。然后,向下移动的插入力需要牢固和刚性。
与可以举起相当重的物体的笛卡尔机器人相比,SCARA 机器人的刚性不如笛卡尔机器人,并且还受到它们可以举起的重量的限制。 SCARA机器人占地面积小,一般用于移动距离相对较小的应用场合。它们比铰接臂具有更少的自由度。另一方面,它们具有很高的准确度并且具有很高的可重复性。而且它们比铰接臂便宜。
SCARA 机器人的工作包络线是圆柱形的,这也是考虑应用时的一个考虑因素。 SCARA 机器人通常比关节臂快,但不如 Delta 机器人快。
极地或球形机器人
优点: 比关节臂更简单的控制系统。可以有很长的距离。非常适合许多焊接应用。可能比关节臂快。
缺点: 不如铰接式机械臂灵活。较旧的技术。通常需要相当大的占地面积。不如Delta武器快。
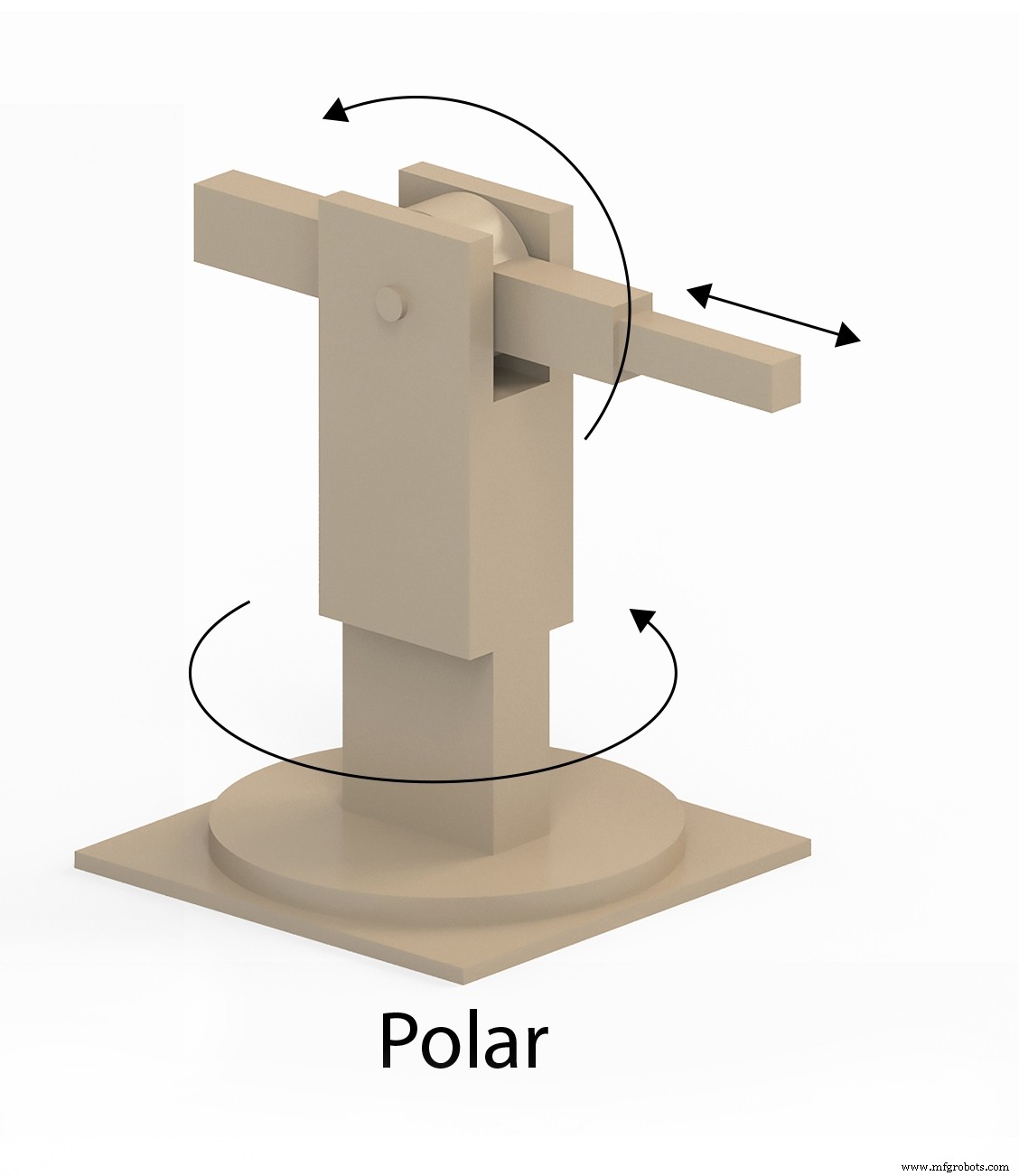
Polar 机器人(有时称为球形机器人)具有两个旋转关节和一个线性关节的组合。他们的设计创造了一个球形的工作空间。
有趣的事实: 第一个工业机器人(创建于 1950 年代),称为“Unimate”,是一个球形机器人。
Polar 机器人可用于注塑、喷漆、弧焊和点焊。当配备合适尺寸的线性臂时,它们可以达到很长的范围。
极地机器人是一项较旧的技术,可以用关节臂机器人(也具有球形工作范围)代替,尽管在某些应用中,极地机器人可能仍然比其替代品更具成本效益。
Delta 机器人
优点: 用于拾取和放置操作的机械臂的最快设计。轻的。准确的。
缺点: 仅限于相对小而轻的物体。不适合在垂直平面上处理物体。范围有限。
Delta 机器人 (也称为平行机器人)具有平行四边形形状的三个机械臂。通常,delta 机器人位于工件上方,连接到高架支架上。因为所有的电机都在底座上,所以机器人的关节和手臂与其他机器人相比非常轻。 Delta机器人有一个倒置的圆顶形工作空间。
有趣的事实: Delta 机器人最初的设计目的是让巧克力制造商能够捡起巧克力块并将它们放入盒子中。

Delta 机器人的设计实现了高速和精确的操作。 Delta 机器人主要用于拾取和放置应用。其他应用包括点胶、焊接和组装。 Delta 机器人不能承载重载荷,这限制了末端工具 (EoAT) 的类型和它们可以处理的任务。
Delta 机器人的混合设计有时会在手臂末端放置旋转关节,以增加其运动的灵活性。
圆柱形机器人
优点: 死板的。准确的。非常适合需要圆形几何的应用。
缺点: 较旧的技术。运动灵活性有限。
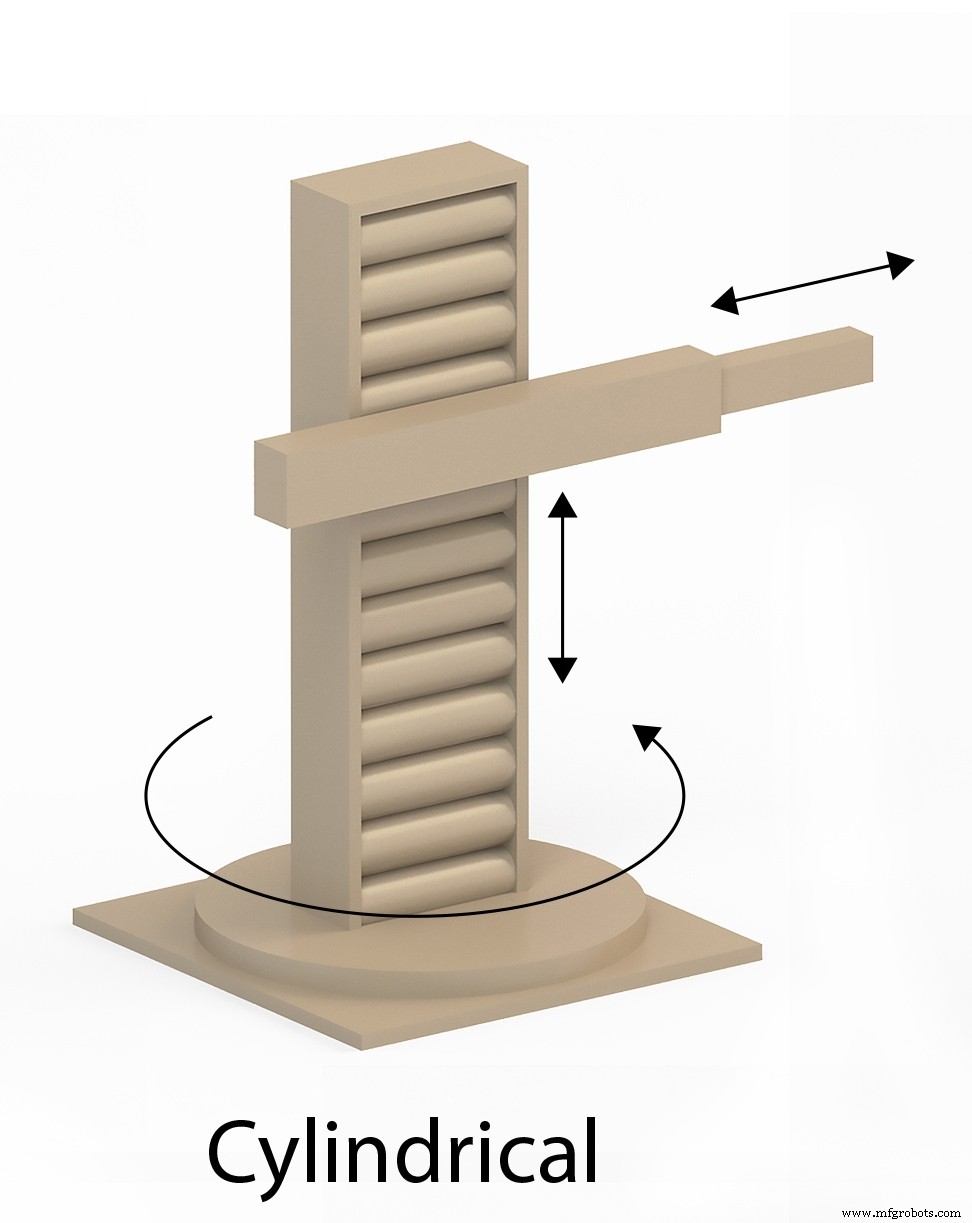
圆柱形机器人 底部至少有一个旋转关节和两个线性关节。这种设计导致了一个圆柱形的工作空间。
圆柱形机器人通常用于狭小的工作空间,它们非常适合需要圆形对称的物体(例如电线、管道)。研磨、组装和点焊应用使用圆柱形机器人。
协作机器人(cobots)
优点: 与人一起工作是安全的。现代界面允许“教”机器人手臂做什么,而无需编写代码。
缺点: 并不总是最快的机械臂。力量和速度有限。
协作机器人 (cobot) 可在安全的工作环境中实现人机交互,而无需在传统工业机器人应用中采取围栏或其他安全措施。但是,安全措施会导致操作速度降低。

除了与人类一起安全操作外,使协作机器人更具协作性的功能之一是操作员能够教机器人手臂进行动作而无需编写编程代码。操作员抓住机器人手臂并按照机器人需要的方式移动它。然后机器人手臂可以复制演示的运动。
标准协作机器人通常并非设计用于处理非常重的物体。这对其可以管理的产品范围造成了限制。
协作机器人具有广泛的应用,例如机器管理、拾取和放置、组装、弧焊,但通常不适合重型应用或非常高速的任务。
自主移动机器人

AMR 或自主移动机器人代表了工业机器人市场中一个快速增长的部分。它们有多种形状和尺寸,针对它们设计执行的任务进行了优化。
轮式推车
推车或带轮车辆形式的 AMR 通常用于在工厂或仓库设施内运输货物。它们配备了传感器、机载计算能力和电动机,使它们能够在设施周围移动并创建内部地图。这通常是由一个人跟随 AMR 来完成,通过远程控制引导它。
一旦创建了内部地图,就可以指示 AMR 其需要前往的目的地。 AMR 的一个关键特征是它们可以独立(“自主”)从一个地方到另一个地方,避开沿途的障碍物。如果有人、叉车或其他物体挡住了他们的去路,他们可以转向避开障碍物,甚至可以规划一条通往目的地的全新路线。
与传送带系统相比,AMR 的自主功能使其非常灵活。
轮式推车形式的 AMR 可单独用于运输货物,也可用作机器人群或机器人车队的一部分。例如,亚马逊使用 AMR 车队。亚马逊使用所谓的“货到人”配置,其中每个机器人都会拿起整个货架上的产品,然后将其带到拣货站的人员手中。然后,该人从货架上挑选产品并将其放入容器中以完成电子商务订单。
最近,计算机视觉、人工智能和夹持器技术的进步使得用铰接式机械臂代替拣选站的人员成为可能。在这种情况下,轮式推车 AMR 将货物带到机器人手臂上,进行机器人对机器人的协作。
自动导引车 (AGV)
AGV 通常是带有轮子的车辆形式,它们是比 AMR 更古老的技术。它们的机载智能较少,因此不像 AMR 那样自主。 AGV 不具备绘制设施地图的能力。相反,他们依赖于为他们制定的路径。路径由放置在地板中的电线、特殊胶带或其他类型的导轨定义。如果AGV在其路径上遇到障碍,它只能停下来寻求帮助。
然而,AGV 和 AMR 之间的区别正变得越来越模糊。 AGV 获得了更多的车载计算能力,有些现在确实能够绕过其路径中的障碍物。
带有机械臂的 AMR
机械臂可以安装在轮式推车 AMR 的顶部。这增加了机器人的灵活性和它可以执行的各种任务。一个应用是使用这样的机器人来管理整排机床。机器人可以卸载一个成品并将一个新的空白工件装入一台机器,然后向下移动并重复一系列机器的操作。
腿式机器人
数百万人看过波士顿动力公司制作的跳舞机器人的 YouTube 视频,因此也看到了两足和四足机器人。一种带腿机器人的工业用途设想将它们部署到包裹递送中。另一个用例是搜索和救援行动。
用腿代替轮子有一定的优势。腿使机器人能够在某些地形上行驶,而带轮的手推车会发现这些地形是困难的或不可能的。腿使爬楼梯成为可能,并且比带轮子的手推车更容易进出车辆。
球形 AMR
球体形式的自主移动机器人可在市场上买到,并且与其他形状因素相比具有特殊优势。球形 AMR 的系统组件密封在耐用的外壳内。这使它们能够在恶劣的环境中运行。它们还可以漂浮并在水上旅行。球形 AMR 可以是两栖的,可以在水上和陆地上行驶。
球形 AMR 的推进系统最常见的是基于移动重心。
球形 AMR 的工业应用主要用于监视和远程检查。配备摄像头和通讯设备,他们可以将视频传输回远程操作员。对于可能存在有毒气体或其他危险条件的恶劣环境,球形 AMR 可能是理想的选择。
飞行机器人(空中无人机)
无人驾驶飞行器 (UAV) 或无人机正越来越多地用于各种工业目的。一种应用是在仓库中使用无人机进行盘点。无人机可以飞过仓库的过道,并使用计算机视觉来计算货架上箱子里的物品数量。

根据其设计,工业无人机可以是一种自主移动机器人 (AMR),因为某些模型可以自动检测障碍物并避开它们,并独立导航到目的地。一些工业无人机可以被赋予“任务”,其中可能包括飞越露天采矿作业或基础设施项目。无人机自主飞行,可以记录项目的视频,或进行某些测量并记录下来。此类无人机可用于监控建设项目的进度。
亚马逊和其他公司已经在有限地使用无人机来运送耐用品和杂货。
水下机器人

有各种各样的机器人设计用于水下。一些水下机器人被设计为自主的(自主水下航行器 - 无人机),有些被设计为通过无线或有线系绳进行远程控制。一些水下机器人使用螺旋桨作为推进系统,类似于潜艇。另一方面,许多这样的机器人模仿生物的动作来推进。有些模仿海豚的动作,有些模仿蛇,还有一些像鱼一样移动。以这种方式模仿自然被称为“仿生”,因为机器人的动作模仿生物。
水下机器人可用于海上石油平台、管道的检查和科学研究。其他应用包括使用水下机器人检查桥底、检查水电大坝进水口和检查珊瑚礁。
警察部门正在使用水下机器人对水体底部进行录像以寻找证据。军方也对水下机器人感兴趣。声纳系统能否分辨出机器人“海豚”和真正的“海豚”之间的区别吗?
水下机器人的优点很多。这样的机器人意味着没有必要承担人类潜水员的风险和费用。机器人可以比人在水中停留的时间更长。为水下机器人配备传感器使它们能够测量和记录几乎无限数量和类型的特性
如何为您的组织寻找理想的机器人类型
HowToRobot 是一个全球平台,可帮助公司通过自动化取得成功。通过使用超过 15,000 家机器人公司的 HowToRobot 全球目录,您可以找到您需要的机器人类型,非常适合您的应用。
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Please note there are impartial HowToRobot experts who can help you navigate through the process.单击此处与专家顾问进行咨询。
工业机器人