

机器人关节类型:详细指南
来源:www. idtechex.com
随着越来越多的公司采用机器人技术,制造业的自动化正在迅速发展。这归因于业务自动化的好处以及更智能和更智能流程的使用。您可以获得更多的生产量,并降低制造工厂受伤的风险。大多数企业倾向于使用机械臂来满足拾放、包装、喷漆和组装等任务。
来源:www.研究门网
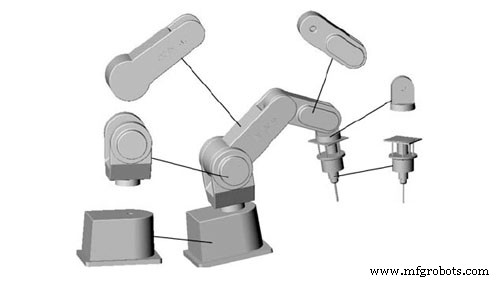
机器人关节是指机器人的可移动部件,导致相邻连杆之间产生相对运动。在这种情况下,链接用于指连接关节的刚性构件,以实现清晰和充分的功能。这表明工业机器人手臂的特点是使用链接和关节的组合来实现最佳功能。必须确保机械手上的关节相应地工作,以确保在应用程序中具有精度和准确性。
机器人关节有时也称为轴。它们是必不可少的,可以派上用场,以确保手臂的运动不受限制或干扰。了解有关机器人关节的更多信息将帮助您根据要满足的任务确定要使用的机械臂类型。 来源:www.大不列颠网
鉴于制造业中使用了不同类型的机器人,您还会发现各种机械接头。这些关节在运动和应用方面有所不同,尤其是在要使用的机器人类型方面。
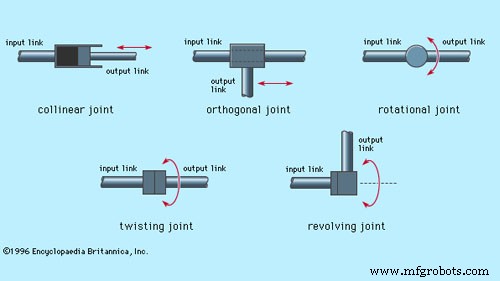
当谈到机械臂中的机械关节时,您需要考虑五种主要类型。其中两个关节是线性的,这意味着相邻连杆之间的相对运动是平移的。另一方面,其他三个是旋转的,这意味着连杆的相对运动涉及它们之间的旋转。机器人机械关节的五种类型包括:
在线性关节中,相邻连杆的相对运动是平行的。这意味着输入和输出链接在线性运动中滑动。这种运动导致平移运动。这种线性运动可以通过多种方式实现,包括使用伸缩机构和活塞。这种类型的接头也称为 L 型接头。
正交接头也通常称为 O 型接头。它们具有输入链接和输出链接所采取的相对运动。正交关节中涉及的这种运动是平移滑动运动。然而,与线性关节排列不同的是,正交关节的输出连杆垂直于输入连杆。
当涉及到旋转关节时,您会发现旋转相对运动的使用对于在多个工作区工作的机器人机械手来说非常方便。这些运动是在旋转轴垂直于输入和输出连杆的轴的情况下进行的。这些旋转接头也称为 R 型接头。
这种类型的关节具有旋转运动,在使用时也会导致一定程度的旋转。这些关节的运动是相对于旋转轴的,旋转轴垂直于输入和输出连杆的轴。扭转接头也称为T型接头。
在旋转关节中,与其他关节相比,情况略有不同。这些关节还具有在不同应用中派上用场的旋转运动。这些关节的运动以两个连杆之间的运动为特征。输入连杆的轴设计为平行于关节的旋转轴。另一方面,输出连杆的轴线设计为垂直于关节的旋转轴线。这种接头也称为V型接头。 来源:www.科技评论网
不同的机器人将使用不同类型的机械关节。了解更多有关不同机器人的信息将使您能够更好地投资适合您的机器人。需要考虑的一些最常见的机器人包括:
关节式机器人设计很可能具有不同的旋转关节范围和组合。该范围可能具有简单的 2 个关节结构,并移动到具有 10 个或更多关节的更复杂结构。在这种设计中,手臂通过扭转接头连接到底座,而手臂中的连杆则通过旋转接头连接。
对于笛卡尔机器人,该设计的特点是使用三个线性关节。这些关节位于涉及 X、Y 和 Z 的笛卡尔平面上。这些机器人还可能具有附接的手腕,具有更容易旋转的关节以进行移动。这种特殊的机器人也被称为直线或龙门。
圆柱形机器人有一个连接到底座的旋转关节和一个用于连接不同链接的线性关节。鉴于圆柱形机器人在圆柱形的工作范围内工作,旋转和线性运动可以派上用场,以确保达到精度。
在机器人的极轴设计中,手臂使用扭转接头连接到底座。有时,您还会发现使用两个旋转接头和一个线性接头的组合。由于该机器人也被称为球形机器人,因此所展示的工作范围也将是球形的。该机器人中使用的轴形成了一个极坐标系,使机械手可以轻松工作。
SCARA 机器人是许多制造商的热门选择,尤其是那些希望实现装配流程自动化的制造商。这种机器人通常是圆柱形的,工作在相对圆柱形的工作范围内。它的特点是使用了在组装过程中派上用场的两个平行接头。当机器人在使用中时,这些关节在一个选定的平面上提供顺应性。
Delta 机器人采用蜘蛛式结构设计,可以为用户提供优质服务。它们由连接并连接到公共底座的平行四边形构成。这种类型的机器人上的关节既是旋转的又是线性的。这允许机器人在圆顶形工作区域中移动手臂工具的单端。提高其性能,确保不同任务的开发准确进行。
在使用机器人技术作为自动化业务中不同流程的手段时,您需要牢记不同的方面。这些方面在您选择使用的特定机器人的性能方面发挥着巨大的作用。当谈到使用工业机械臂时,机器人关节应该是不断更新的东西。
了解不同的关节以及它们如何影响机器人的性能。这将帮助您衡量最适合您想要自动化的活动的关节类型。一旦你有了它,你就可以投资购买带有你在市场上的关节的机器人手臂。花点时间与自动化设备制造商合作,他们将为您提供帮助。 
当您将机械臂纳入您的业务时,请确保您与能够为您提供最佳产品的优质机械臂制造商合作。此外,对它们的含义有基本的了解也很重要。机械臂具有具有特定功能的身体、手腕和末端执行器。为了使这些不同的部件准确工作,需要存在机器人关节。在本文中,我们将深入研究不同的机器人关节,让您更好地理解。 目录
什么是机器人关节?
机器人机械关节的类型
线性关节
正交关节
旋转关节
扭转接头
旋转关节
不同类型的机器人和使用的机械关节

铰接式
笛卡尔
圆柱形
极地
SCARA
Delta
结论
工业机器人