

实现高质量机器人增量成型的 5 个步骤
机器人增量成型对于小批量板材成型具有成本效益。本案例研究展示了一个团队如何通过 RoboDK 实现质量。
Mario Guillo 和他的团队是法国 Institut Maupertuis 的研究人员,专门从事工业研究。
团队注意到传统钣金成型方法存在一些问题......他们决定解决这些问题。
为什么小批量表格成型成本高
钣金成型是一个数字游戏。如果您要制造大量相同的零件,成本和时间通常会相等。但是,如果您只制作一两个零件,很快就会变得不经济。
深拉深是板材成型最常用的方法之一。它涉及设计和制造模具,然后在模具上缓慢“拉伸”每张材料。当您只制作几个零件时,模具的成本大大超过了成型本身的成本。
传统上,大多数厂商处理这个问题的方式只是接受它。 “嗯,这就是生活,”你说。您祈祷并希望我们的其他加工操作能够平衡这一低效的过程。或者,如果质量不重要,您可以选择手工成型。
Mario 和他的团队决定不必这样。有一种方法可以形成对小批量经济的优质产品:增量成型。
在这个案例研究中,我们展示了 Mario 和他的团队如何使用 RoboDK 通过机器人增量成型经济地创造出优质产品。
什么是机器人增量成型?
 增量成型(也称为增量板材成型)是一种替代拉深的方法,它涉及使板材变形很少-一点一点,一层一层。这样一来,就有点像3D打印或者CNC加工了。不是在每一层中添加或移除材料,而是在每一层中将片材略微弯曲。
增量成型(也称为增量板材成型)是一种替代拉深的方法,它涉及使板材变形很少-一点一点,一层一层。这样一来,就有点像3D打印或者CNC加工了。不是在每一层中添加或移除材料,而是在每一层中将片材略微弯曲。
自 1990 年代以来,使用改进的 CNC 机床实现了增量成型。 CNC 工具被一个单点球体取代,该球体将所需的形状绘制到每一层的板材上。润滑剂用于减少摩擦的影响。
修改后的CNC机器是一个很好的解决方案,但它们有一个问题:它们对于较大的零件来说成本很高。这对于想要使用增量成型进行原型制作的公司来说是不可行的,这是一种常见的应用。
机器人增量成型通过使用工业机器人握住工具克服了这个问题。它与我们在上一篇文章中介绍的机器人加工有相似之处。
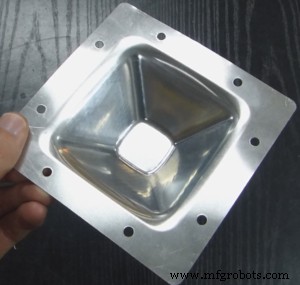
与CNC机器不同,机器人不限制零件的大小。因此,Mario 的团队认为机器人增量成型可用于需要成型大片材的大量应用,包括颅骨植入物、假肢和汽车镶板。
实现高质量机器人增量成型的5个步骤
机器人增量成型非常容易……但前提是您遵循正确的步骤。该团队使用以下五个步骤(如他们的研究论文中所述)通过机器人增量成型来实现优质产品:
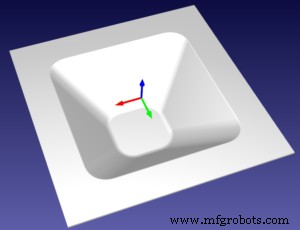
1.构建 3D 模型
几乎所有产品都是在 CAD(计算机辅助设计)包中设计的,所以这一步应该很简单。您需要定义要制造的形状并为其创建 3D 模型。
2.生成轨迹
然后你应该生成一个CNC轨迹。这可以在许多 CAM(计算机辅助制造)包中完成。您甚至可以在同一个软件中生成模型和轨迹。但是,如果您的 CAD/CAM 软件没有此功能,那么像 CamBam、MeshCAM 或 FreeMILL 这样的廉价 CAM 程序可能是一个不错的选择。
团队使用了CamBam CNC软件,这是一种用于设计和构建CNC模型和轨迹的高性价比工具。
在这一步中,你需要决定每一层的深度和分层策略。团队解释说,简单零件有两种常见的策略:
- Z层策略—— 这种简单的策略涉及单独绘制每一层,并在每一层的开头缩进。
- 螺旋策略—— 这个稍微复杂一点的策略包括画一条从表格顶部到底部的螺旋形连续线。这会产生更光滑的工件,并且对机器人施加的力更小。
3。生成 G 代码
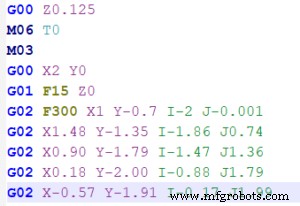
一旦你有了你的轨迹,下一步就是将其转换为 CNC 机器可以理解的指令。最常见的选项是 G-Code,但您也可以使用 APT-CLS 或 NCI。
对于传统的基于 CNC 的增量成型,这将是生产前的最后一步。然而,当我们使用机器人时,还有另一个非常重要的步骤。
4。将 G-Code 变成机器人指令
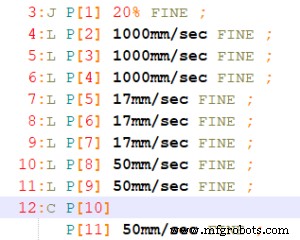
为了使用机器人进行增量成型,您需要将 G 代码转换为机器人能够理解的命令。但是,每个机器人制造商都有自己的编程语言。一些制造商有专门的 CNC 软件插件,但它们通常非常昂贵,并且只能与他们品牌的机器人一起使用。
Mario 和他的团队决定使用 RoboDK,因为它包含一个标准的机器人加工工具。它非常易于使用,并且比市场上的其他选项更具成本效益。您只需将 G-Code 文件加载到软件中,它就会自动生成机器人路径,避免机器人错误。
5。将程序传送给机器人
最后一步是将程序传送给机器人,开始增量成型过程。如果前面的所有步骤都顺利,这应该是相当简单的。但是,有两点你应该牢记:
- 选择高刚性机器人—— 机器人的刚度低于数控机床。当施加非常大的力时,这可能会导致工具偏转,这可能发生在加工任务中。该团队使用了一个重载机器人(有效载荷超过 500 公斤)来确保它有足够的刚度来完成任务。
- 避免不必要的厚材料—— 由于刚性低,较厚的材料很难用机器人成型。仅选择您的产品所需的材料厚度,如果您开始看到工具变形,请准备好使用较薄的材料。
第一次运行程序时,请留意任何可能因机器人工具受力过大而导致的工具偏差。
这是该团队项目的视频:
这项工作由 Institut Maupertius 与 Halcyon performance 合作完成。
工业机器人