

这是您唯一需要的制造单元吗?
想象一下,您只需要一个可以做所有事情的制造单元。这就是一组研究人员正在使用 RoboDK 所做的事情。
想想你现在是如何制造零件的。
有很多步骤,不是吗?一个单元将原材料变成可用的工件。另一个单元切割出零件的粗略形状,然后完成精细加工。还有一个单元进行表面处理。最后,您的工作车间里挤满了机器,这导致您的操作员四处奔波以试图跟上。
如果你只有一个单元格来完成所有这些阶段不是很有用吗?
这是一组研究人员决定在最近的欧盟地平线 2020 资助计划项目提案中解决的问题。
介绍... HYROMAN
HYROMAN 是 2017 年提交的欧盟项目提案的名称。
欧盟(欧盟)将其对研究项目的资助分为几轮。本轮称为 Horizon 2020,到目前为止,在过去 5 年中已提交超过 600,000 份申请(其中只有 3% 获得资助)。
HYROMAN 代表混合机器人制造。该项目背后的想法是开发一个平台,可以在一个机器人单元内实现所有制造阶段。
项目提案解释说,HYROMAN“打算建立一个颠覆性的创新制造系统,以实现敏捷且具有成本效益的生产。”
HYROMAN 平台
拟议项目的核心是“HYROMAN 平台”,它“是一种先进的机器人系统……可以最大限度地减少生产时间、车间空间和所需的资本支出。”
这将三个核心制造步骤组合到一个单元中:
- 增材制造 — 电池不会使用金属片,而是使用“沉积工具”(3D 打印)来构建零件的粗略形状。将附加一个挤出机工具作为机器人末端执行器以完成此阶段。
- 减材制造 — 接下来,单元内的第二个机器人将使用加工工具从零件中去除多余的材料。
- 转型制造 — 最后,第二个机器人将其加工工具更换为表面处理末端执行器。这将用于改变零件表面的微观结构并使其达到最终质量。
实际上可以用一个机器人完成所有这三个阶段。然而,增材制造比其他两个步骤需要更长的时间,因此使用两个机器人是有意义的。也许在 3D 打印阶段使用多个机器人来增加单元的整体吞吐量甚至可能是有意义的。
HYROMAN 如何使用 RoboDK
HYROMAN 之所以成为一个好主意,是因为它使用 RoboDK 作为编程平台。 RoboDK 使得在同一环境中实现所有三个编程步骤变得非常容易。
在他们的提议中,团队使用该软件构建了细胞第一阶段(3D 打印)的模拟。为此,他们使用了 3D 打印向导。然而,这仅仅是开始。借助 RoboDK 的集成编程向导,所有三个阶段都很容易实现。
以下是 HYROMAN 团队如何使用相同的软件进行增材制造、减材制造和转型制造:
增材制造 — 3D 打印向导
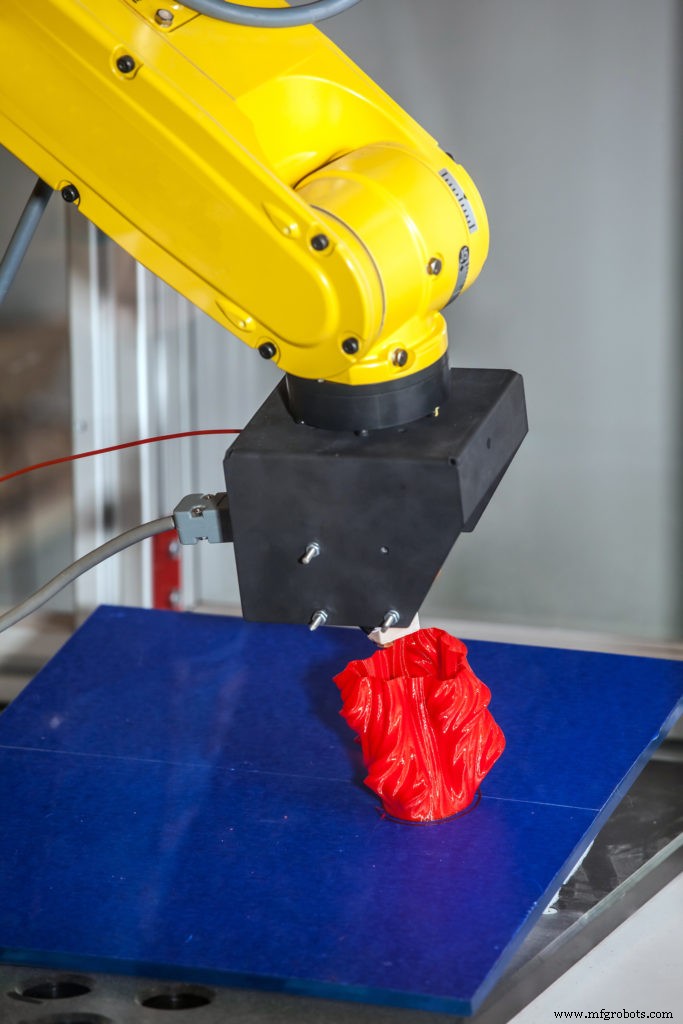
第一步是使用增材制造3D打印零件的大致形状。
RoboDK 的 3D 打印向导让您可以轻松地将 CAD 模型转换为一系列机器人指令。它需要一个GCODE文件作为输入,可以通过免费软件Slic3r生成。
3D打印有很多可能性。最近,我们报道了一个团队正在使用 RoboDK 来 3D 打印食物。我们还看到了用于建筑应用的具体 3D 打印。
请参阅以下 RoboDK 中的 3D 打印示例,并查看文档页面以获取实用说明。
减材制造 - 机器人加工向导
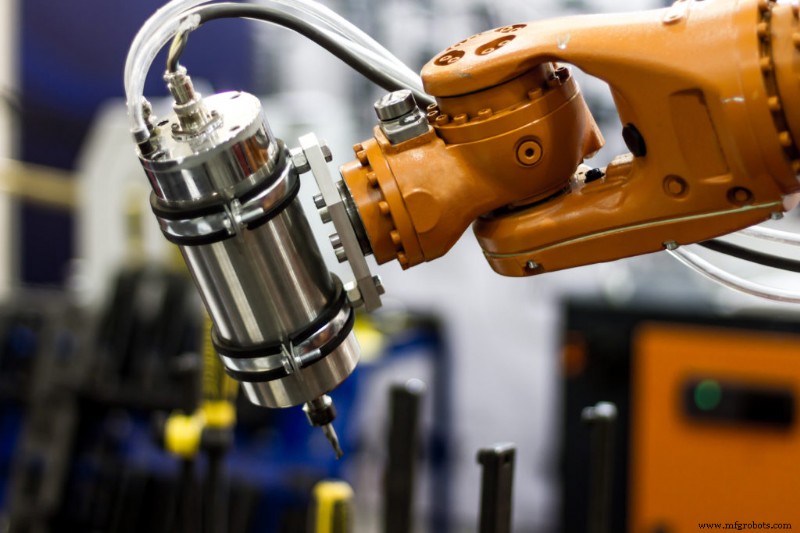
第二步是使用机器人兼容的机床加工零件的精细细节。
RoboDK 的加工向导遵循与 3D 打印非常相似的过程。它使用 GCODE 作为输入或其他类型的 NC 文件。但是,该工具不是添加材料,而是用于去除材料。
有关机器人加工如何帮助您的业务的详细信息,请阅读我们的文章机器人加工如何简化您的生活。
请参阅以下 RoboDK 中的机器人加工示例,并查看文档页面以获取实用说明。
转型制造 - 曲线跟随向导

最后一步是进行表面处理,以改善最终产品的材料性能(例如提高耐磨性、可焊性、耐腐蚀性等)。
机器人的确切运动将取决于表面处理的具体方法。然而,许多方法将要求机器人沿弯曲路径移动或移动到各个点。为此,RoboDK 的曲线跟随和点跟随向导将是最有用的。
这些动作使表面处理应用与检测或喷漆任务非常相似,您可以在我们的文章机器人检测制造商指南中找到相关内容。
请参阅以下 RoboDK 中的曲线跟随任务(绘画)示例,并查看文档页面以获取实用说明。
如何使用 RoboDK 改进流程
HYROMAN 是个好主意。但是,您无需在同一个机器人单元内执行所有三个制造任务即可看到好处。您可以通过实施其中一项任务来改进您的流程。
三项任务中哪一项对您的业务最有用? (即机器人 3D 打印、机器人加工或机器人表面处理)。
选择对您有意义的,然后使用上面的链接了解更多信息。
你可以用一体化制造单元实现什么? 在下面的评论中告诉我们,或加入 LinkedIn、Twitter、Facebook、Instagram 或 RoboDK 论坛上的讨论。
工业机器人