

GNSS 平台断电,首次修复时间
U-blox 推出了 M10,这是其最新的 GNSS(全球导航卫星系统)平台,用于低功耗定位应用。 U-blox M10 完全由内部设计,适用于各种应用,例如运动手表、货物追踪器和牲畜标签,所有这些都采用小巧的外形和非常长的电池寿命。
M10配备了该公司的Super-S技术,有助于过滤噪声和区分定位信号。即使在城市峡谷等恶劣环境中,该设备也可以同时从多达四个 GNSS 星座中获取数据。摩天大楼阻挡了卫星和接收器之间的视线,使得 GNSS 接收器极难锁定轨道上卫星发射的信号足够长的时间以连续定位自己。增加卫星数量可以产生显着差异。
在 EE 时代 采访中,U-blox AG 定位产品经理 Bernd Heidtmann 重点介绍了 M10 如何设计为在连续跟踪模式下消耗 12 mW,比母公司之前的技术 (M8) 减少约 5 倍。
“Super-S 技术通过弱信号或小天线优化功耗和精度。较短的首次定位时间 (TTFF) 可确保低功耗,而弱信号补偿功能可提高定位精度,”Heidtmann 说。
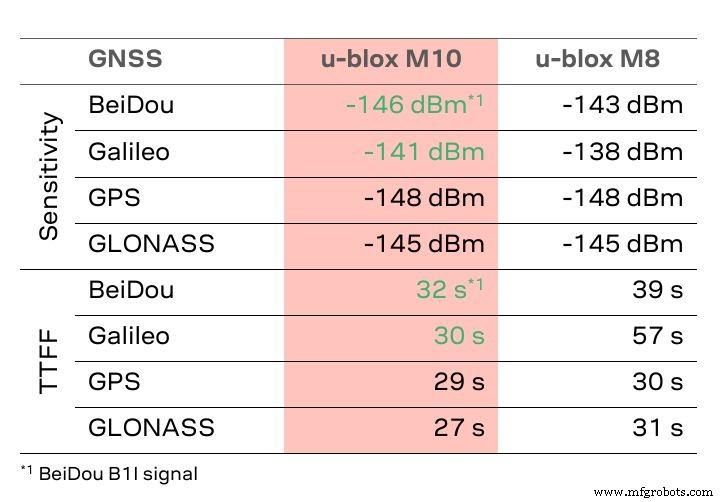
图 1:u-blox M10 和 u-blox M8(来源:u-blox)
全球导航卫星系统平台
随着我们越来越依赖卫星定位,我们一直期待更高的定位精度。由于硬件和软件电子成本的降低,在应用和用例方面有了很大的扩展。
欧盟的全球导航卫星系统伽利略允许 GNSS 接收器确保卫星信号实际上来自伽利略卫星并且未经修改。这种方法使黑客更难完成他们的“工作”。欧洲 GNSS 星座将率先向民用用户免费提供经过认证的导航信息。
Galileo 是欧洲全球导航卫星系统 (GNSS),旨在为世界各地的用户提供位置、导航和天气信息。与其他 GNSS 系统不同,Galileo 由欧洲航天局 (ESA) 这一个民间团体管理,其设计旨在满足不同用户群体的需求。
伽利略卫星部分涉及使用 30 颗卫星(24 颗运行卫星和 6 颗备用卫星),轨道高度超过 23,000 公里。这些卫星将均匀分布在三个轨道平面上,每个轨道平面大约需要 14 小时。
所使用的安全方法包括在 GNSS 导航消息上附加一个加密的身份验证签名,该签名可用于验证基于混合对称/非对称密钥方法的消息。 GNSS 数据认证将在高级驾驶辅助系统、自动驾驶或任何风险商业活动中发挥重要作用。
U-blox 硬件
U-blox M10 设计为在连续跟踪模式下消耗 12 mW,以保持电池供电应用的低功耗。 M10 增加的射频灵敏度也减少了平台在初始化时到达第一个固定位置的时间,即使使用小天线也能很好地工作。
“采用 QFN 封装的 U-blox M10 芯片尺寸为 4×4 毫米。 “MAX”模块允许在不需要外部组件的情况下进行集成。 “ZOE”外形具有与 MAX 和 NEO 模块相同的功能。这就是所谓的系统在一个包中。它具有与 max 模块相同的功能,但体积仅为 20 平方毫米”,Heidtmann 说。
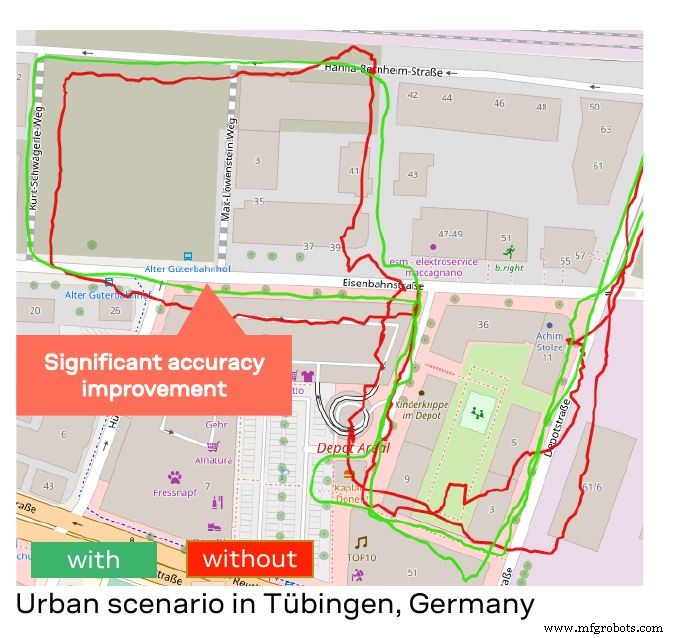
图 2:三个模块,左起:QFN 封装、MAX 模块和 ZOE 外形(来源:u-blox)
在澳大利亚和德国进行的两项测试表明,即使在大型建筑物可能会遮挡信号的恶劣环境中,Super-S 和改进的“Super-E”模式也能以更低的更新速率实现更多的功耗降低,从而优化信号非常低(图 3)。
Super-S 技术解决了工业跟踪和可穿戴用例中遇到的两个常见挑战:弱 GNSS 信号和天线定位不足,以及恶劣天气、天空视野受阻和城市峡谷等因素对到达定位的 GNSS 信号质量产生不利影响接收机,降低定位性能。 u-blox Super-S 技术结合了 2 种不同的尺寸来应对这些情况。
GNSS 接收器可以处于两个操作阶段:获取阶段和跟踪阶段。在第一阶段,有更高的灵敏度,通过获得更高概率的位置和消耗很少的能量来减少捕获时间。下一阶段的目标是保持位置。
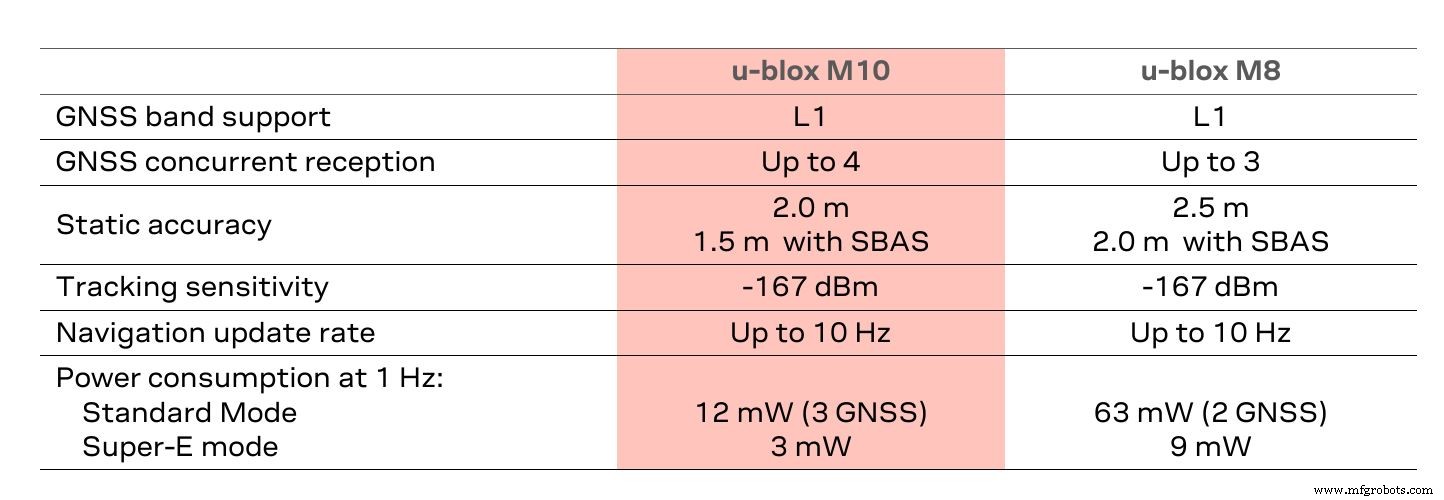
图 3:澳大利亚同时接收 4 个 GNSS 的最大位置可用性(来源:u-blox)
图 4:德国弱信号补偿(来源:u-blox)
“如果你看图 3 左边的图片,你会看到一个一和二。对于第一,您会看到建筑物没有第二高。如果你向右看,你会看到所有这些颜色的线条都是干的,绿色是真正的路径,真正的位置。然后是 M8 黄色和 M10 蓝色。对于第一,您会发现几乎没有区别。他们报告的基本上是真实情况。但如果你看看第二个,你就会发现不同。黄线距果岭约20米。而蓝线距离果岭约10米。在这种情况下,我们看到在市区深处有非常高的建筑物,因此拥有 4 个 GNSS 会有所不同,”Heidtmann 说。
他补充说,“如果你在这个区域,你不可能看到每颗卫星,因为建筑物会给你留下阴影。如果您可以收听所有四个星座,您将赶上更多的卫星。然后,当然,这会给您带来好处,因为总有一个选择。因此,接收器将查看所有可用卫星,然后选择最多 30 个信号进行跟踪。但当然,在这种情况下,你没有 30 个,如果你有 8 个或 9 个就很幸运了,”海德曼说
小天线或不良天线位置会导致射频信号强度较差。弱信号补偿改变了接收器的行为以适应这种情况。 “驾驶测试显示位置和速度精度提高了 25% 以上,”Heidtmann 说。
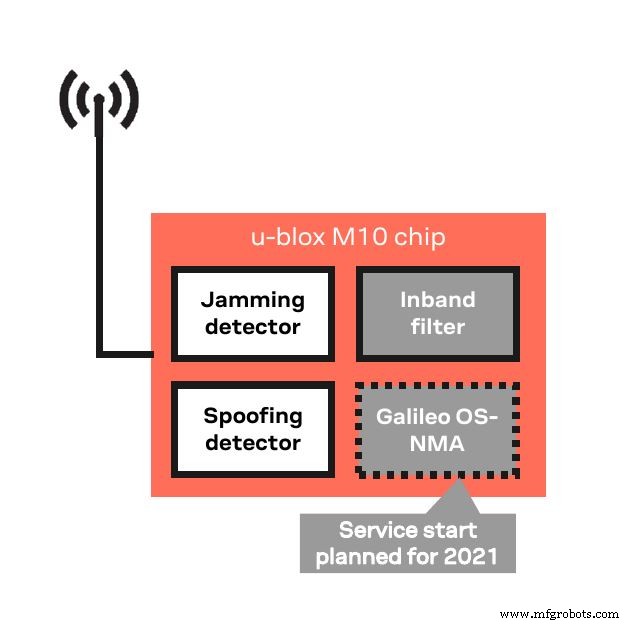
图 5:M10 的框图(来源:u-blox)
图 6:u-blox M10 和 M8 的对比(来源:u-blox)
u-blox M10 具有高级欺骗和干扰检测功能。 “检测到欺骗和干扰攻击并将其报告给主机。基于 GNSS 原始数据分析的欺骗检测,以及使用经过身份验证的信号 (Galileo OS-NMA) 缓解欺骗攻击,”Heidtmann 说。
关键应用程序需要知道他们对接收器获取的数据有多大信心。保护级别描述了最大位置误差并量化了系统的可靠性。此级别受通常影响 GNSS 解决方案的所有误差源的影响。
“例如,如果 GNSS 接收器以一米的 95% 保护水平确定其位置,则报告的位置与其实际位置相距一米以上的可能性只有 5%,”Heidtmann 说。
与 GNSS(全球导航卫星系统)部门相关的系统和技术创新是一个不断快速发展的过程。这些级别的 GPS 的瞬时精度保留给美国国防,但这引发了创建更可靠的替代系统的竞赛,这些系统产生了 GNSS(全球导航卫星系统),世界上几个国家的贡献,例如俄罗斯的 GLONASS ,中国北斗和欧洲伽利略。伽利略数据有助于在各种环境中定位信标和营救遇险人员。
>> 本文最初发表在我们的姊妹网站 EE次。
相关内容:
- 阻止对 GNSS 的威胁
- 卫星导航和软件定义无线电
- GNSS 平台提高了 ADAS 的准确性
- GNSS 校正服务提高定位精度
- 将实时定位技术与不断增长的跟踪需求相匹配
- 如何为具有小型 PCB 的移动设备获得更好的无线性能
- 将芯片天线集成到 PCB 中:了解天线匹配
- 添加天线如何改变设计过程
- 订阅 Embedded 的每周电子邮件通讯
有关 Embedded 的更多信息,请订阅 Embedded 的每周电子邮件通讯。
嵌入式