

步进电机
步进电机与伺服电机
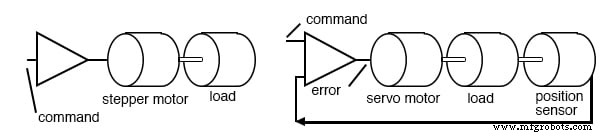
步进电机 是电动机的“数字”版本。转子按照指令以离散的步骤移动,而不是像传统电机那样连续旋转。当停止但通电时,步进器 (步进电机的简称)以保持扭矩保持负载稳定 .
在过去的二十年中,步进电机的广泛接受是由数字电子技术的兴起推动的。现代固态驱动电子设备是其成功的关键。而且,微处理器很容易连接到步进电机驱动电路。
在应用方面,步进电机的前身是伺服电机。今天,这是高性能运动控制应用的成本更高的解决方案。伺服电机的成本和复杂性是由于额外的系统组件造成的:位置传感器和误差放大器)它仍然是低功率步进器无法控制的重载定位方法。
高加速度或异常高的精度仍然需要伺服电机。否则默认步进电机,因为驱动电子简单,精度好,扭矩好,速度适中,成本低。
步进电机与伺服电机
步进电机将读写头定位在软盘驱动器中。它们曾经在硬盘驱动器中用于相同的目的。然而,现代硬盘磁头定位所要求的高速度和高精度需要使用线性伺服电机(音圈)。
伺服放大器是一种线性放大器,带有一些难以集成的分立元件。需要大量的设计工作来优化伺服放大器增益与机械部件的相位响应。步进电机驱动器是不太复杂的固态开关,可以“打开”或“关闭”。因此,步进电机控制器的复杂性和成本低于伺服电机控制器。
慢同步 同步电机可以像单相永磁电容感应电机一样使用交流线电压运行。电容器产生 90° 第二阶段。使用直流电压,我们有一个两相驱动器。
双极的驱动波形 (±) 2-24V 的方波现在更常见。双极磁场也可以由单极产生 (一个极性)施加到中心抽头绕组的交替端的电压(下图)。
换句话说,可以将直流电切换到电机,使其看到交流电。当绕组依次通电时,转子与随之而来的定子磁场同步。因此,我们将步进电机视为一类交流同步电机。
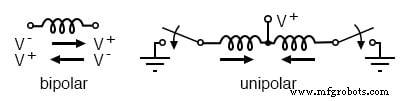
中心抽头线圈在 (b) 处的单极驱动,在 (a) 处模拟单线圈中的交流电流
特点
步进电机坚固耐用且价格低廉,因为转子不含绕组滑环或换向器。转子是圆柱体,也可能有凸极或细齿。转子通常是永磁体。
您可以通过显示制动扭矩的无动力手动旋转来确定转子是永磁体 , 扭矩脉动。步进电机线圈缠绕在叠片定子内,除了可以堆叠 建造。绕组相可能少至两相,也可能多至五相。
这些阶段经常分成两部分。因此,一个 4 极步进电机可能有两相,由相距 90° 的串联极对组成 分开。每相也可能有多个极对。例如,一个 12 极的步进电机有 6 对极,每相 3 对。
由于步进电机不一定连续旋转,因此没有额定马力。如果它们确实连续旋转,它们甚至不会达到亚分数马力的额定能力。与其他电机相比,它们是真正的小型低功率设备。
对于 4 公斤大小的单位,它们的扭矩额定值为 1000 盎司(英寸-盎司)或 10 N-m(牛顿-米)。一个小的“一角硬币”尺寸的步进电机具有百分之一牛顿米或几英寸盎司的扭矩。大多数步进电机的直径只有几英寸,扭矩只有几分之一纳米或几英寸盎司。
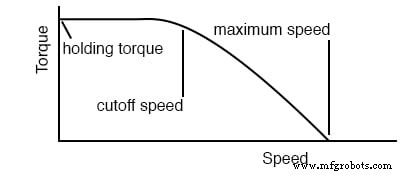
可用扭矩是电机速度、负载惯量、负载扭矩和驱动电子设备的函数,如速度与扭矩曲线所示 以下。通电的保持步进电机具有相对较高的保持扭矩 评分。运行中的电机可用的转矩较小,在某些高速下会减小到零。
由于电机负载组合的机械共振,通常无法达到该速度。
步进速度特性
步进电机一次移动一步,步距角 当驱动波形改变时。步距角与电机结构细节有关:线圈数、极数、齿数。它可以从 90° 到 0.75° , 对应每转 4 到 500 步。
通过以半步移动转子,驱动电子设备可以将步距角减半 .
步进电机无法瞬间达到速度-扭矩曲线上的速度。 最大启动频率 是可以启动停止和卸载的步进器的最高速率。任何负载都会使该参数无法达到。
实际上,在从远低于最大启动频率开始的过程中,步进速率会逐渐增加。停止步进电机时,可能会在停止前降低步进率。
步进器可以启动和停止的最大扭矩是牵引扭矩 .步进器上的这种扭矩负载是由于电机轴上的摩擦(制动)和惯性(飞轮)负载造成的。一旦电机达到速度,拉出扭矩 是不失步的最大可持续扭矩。
步进电机按复杂性递增的顺序分为三种类型:可变磁阻、永磁和混合。可变磁阻步进电机具有带凸极的实心软钢转子。永磁步进电机具有圆柱形永磁转子。
混合式步进电机在永磁转子上增加了软钢齿,以获得更小的步距角。
可变磁阻步进器
可变磁阻步进电机 依赖于通过磁路寻找最低磁阻路径的磁通量。这意味着形状不规则的软磁转子将移动以完成磁路,从而最大限度地减少任何高磁阻气隙的长度。
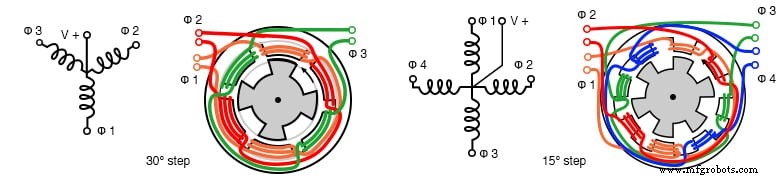
定子通常具有分布在极对之间的三个绕组,转子具有四个凸极,产生 30° 步距角。手动旋转时无定位扭矩的断电步进器可识别为可变磁阻式步进器。
三相和四相可变磁阻步进电机
3-φ 步进器的驱动波形可以在“磁阻电机”部分看到。 4-φ 步进电机的驱动如下图所示。依次切换定子相位会产生转子跟随的旋转磁场。
然而,由于转子极数较少,转子移动的每一步都小于定子角度。对于可变磁阻步进电机,步距角由下式给出:
ΘS =360o/NS ΘR =360o/NR ΘST =ΘR - ΘS 其中: ΘS =定子角,ΘR =转子角,ΘST =步距角 NS =定子极数,NP =转子极数
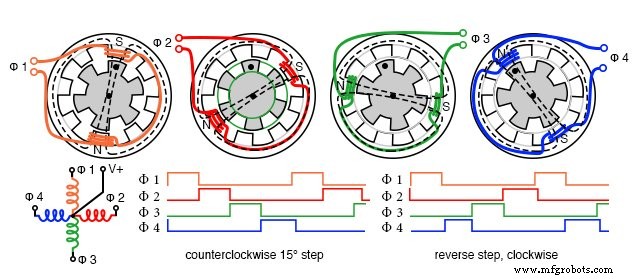
可变磁阻步进器的步进序列
在上图中,从 φ1 移动到 φ2 等,定子磁场顺时针旋转。转子逆时针 (CCW) 移动。注意什么不会发生!虚线转子齿不会移动到下一个定子齿。相反,φ2 定子磁场在转子 CCW 移动时吸引不同的齿,这是一个较小的角度 (15° ) 比定子角度 30° .
转子齿角45° 由上式进入计算。转子逆时针移动到下一个转子齿 45° ,但它与 CW 对齐 30° 定子齿。因此,实际步距角是 45° 定子角之间的差 和 30° 的转子角。
如果转子和定子的齿数相同,步进电机将旋转多远?零——无符号。
从静止状态 φ1 通电开始,需要三个脉冲(φ2、φ3、φ4)来将“虚线”转子齿对准下一个 CCW 定子齿,即 45° .每个定子齿 3 个脉冲和 8 个定子齿,24 个脉冲或步进使转子移动 360
通过反转脉冲序列,旋转方向在右上方反转。方向、步进速率和步数由步进电机控制器控制,为驱动器或放大器供电。这可以组合成一个电路板。
控制器可以是微处理器或专用集成电路。驱动器不是线性放大器,而是一个简单的开关,能够提供足够高的电流来为步进器供电。原则上,驱动器可以是一个继电器,甚至每个相位的拨动开关。实际上,驱动器要么是分立的晶体管开关,要么是集成电路。
驱动器和控制器都可以组合成一个集成电路,接受直接命令和步进脉冲。依次输出电流到合适的相。
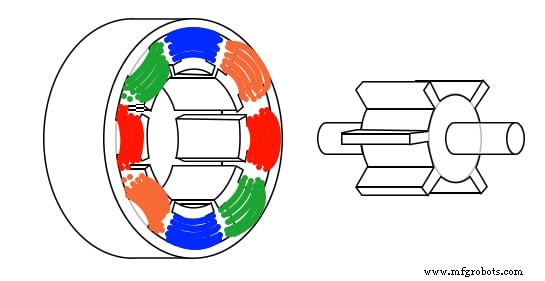
可变磁阻步进电机
您可以拆卸磁阻步进器以查看内部组件。可变磁阻步进电机的内部结构如上图所示。转子具有突出的磁极,因此当它被切换时,它们可以被吸引到旋转的定子磁场。实际电机比我们的简化图要长得多。
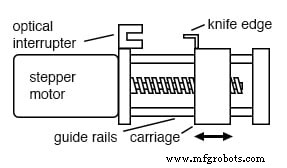
可变磁阻步进驱动丝杠
轴通常装有一个驱动螺钉(上图)。这可能会根据软驱控制器的命令移动软驱的磁头。
当仅需要中等水平的扭矩并且粗步距角就足够时,应用可变磁阻步进电机。软盘驱动器中使用的螺旋驱动器就是这样一种应用。当控制器上电时,它不知道小车的位置。
但是,它可以将托架驱动到光学断流器,将刀刃切割断流器的位置校准为“原位”。控制器从该位置开始计数步进脉冲。只要负载扭矩不超过电机扭矩,控制器就会知道小车位置。
总结:可变磁阻步进电机
- 转子是一个带有凸极(突出)的软铁圆柱体。
- 这是最简单、最便宜的步进电机。
- 唯一一种在断电电机轴的手动旋转中没有定位扭矩的步进电机。
- 大步距角
- 丝杠通常安装在轴上以进行线性步进运动。
永磁步进器
永磁步进电机 有一个圆柱形永磁转子。定子通常有两个绕组。绕组可以中心抽头以允许单极 通过将电压从绕组的一端切换到另一端来改变磁场极性的驱动电路。
双极 需要交替极性驱动来为没有中心抽头的绕组供电。纯永磁步进电机通常具有较大的步距角。断电电机轴的旋转显示出制动扭矩。如果止动角很大,说 7.5° 到 90° ,它很可能是永磁步进器而不是混合步进器。
永磁步进电机需要在两个(或更多)绕组上施加相位交流电。实际上,这几乎总是由固态电子设备从直流产生的方波。
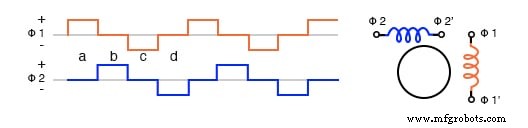
双极 驱动是在 (+) 和 (-) 极性之间交替的方波,例如,+2.5 V 到 -2.5 V。单极 驱动器向线圈提供 (+) 和 (-) 交变磁通量,这些磁通量由施加到中心抽头线圈两端的一对正方波产生。双极或单极波的时序为波驱动、全步或半步。
波浪驱动
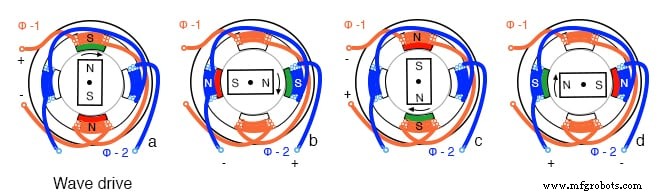
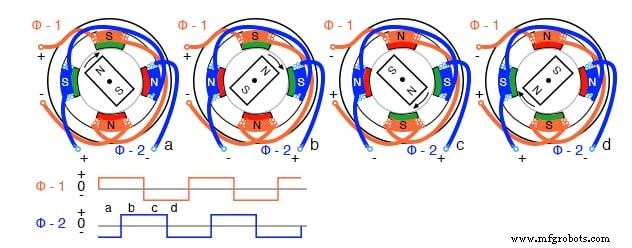
PM 波驱动序列 (a) φ1+ , (b) φ2+ , (c) φ1- , (d) φ2-
从概念上讲,最简单的驱动是波驱动 .从左到右的旋转顺序为正φ-1指向转子北极上,(+)φ-2指向转子右北,负φ-1吸引转子北下,(-)φ-2指向转子左。下面的波形驱动波形显示一次只有一个线圈通电。虽然很简单,但它产生的扭矩不如其他驱动技术。
波形:双极波驱动
波形(上图)是双极性的,因为 (+) 和 (-) 两个极性都驱动步进器。由于驱动电流的极性反转,线圈磁场反转。
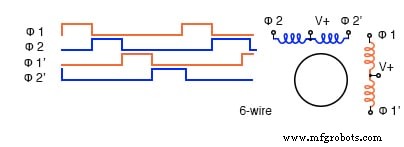
波形:单极波驱动
波形(上图)是单极性的,因为只需要一种极性。这简化了驱动电子设备,但需要两倍的驱动器。波形数量是原来的两倍,因为需要一对 (+) 波才能通过施加到中心抽头线圈的两端来产生交变磁场。
电机需要交变磁场。这些可以由单极或双极波产生。但是,电机线圈必须有单极驱动的中心抽头。
永磁步进电机采用各种引线配置制造。
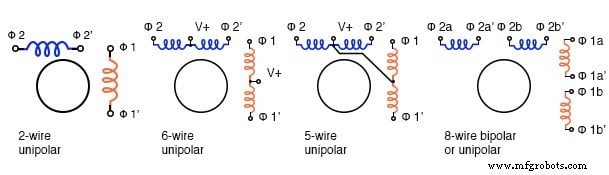
步进电机接线图
- 4 线电机只能由双极波形驱动。
- 6 线电机是最常见的排列方式,由于有中心抽头,因此适用于单极驱动。不过,如果忽略中心抽头,它可能由双极波驱动。
- 5 线电机只能由单极波驱动,因为如果两个绕组同时通电,公共中心抽头会发生干扰。
- 8 线配置很少见,但提供了最大的灵活性。对于 6 线或 5 线电机,它可以为单极驱动器接线。一对线圈可以串联用于高压双极小电流驱动,也可以并联用于低压大电流驱动。
双线绕组 是通过用两根平行线缠绕线圈产生的,通常是一根红色和绿色的漆包线。这种方法为中心抽头绕组产生精确的 1:1 匝数比。这种绕线方式适用于上述四线制以外的所有方式。
全步驱动
完整步骤 驱动提供比波形驱动更大的扭矩,因为两个线圈同时通电。这会吸引两个磁场磁极中间的转子磁极。 (下图)
整步,双极驱动
全步双极驱动,如上图所示,与波驱动具有相同的步距角。单极驱动(未显示)将需要一对单极波形用于上述每个双极波形施加到中心抽头绕组的末端。单极驱动器使用更简单、更便宜的驱动器电路。当需要更多扭矩时,双极驱动器的额外成本是合理的。
半步驱动
给定步进电机几何形状的步距角用 half step 减半 驾驶。这相当于每转两倍的步进脉冲。 (下图)半步为电机轴的定位提供了更高的分辨率。
例如,在喷墨打印机的纸张上移动打印头的电机半步进会使点密度增加一倍。
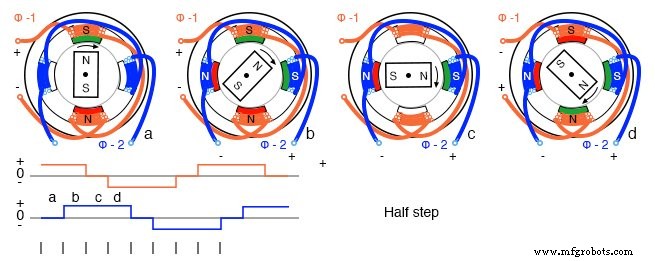
半步,双极驱动
半步驱动是波形驱动和全步驱动的组合,一个绕组通电,然后两个绕组通电,产生两倍的步数。半步驱动的单极波形如上所示。波驱动时转子与场极对齐,全步驱动时转子与磁极对齐。
使用专用控制器可以实现微步。通过变化,可以在正常位置之间内插到绕组的电流正弦许多微步。永磁步进电机的结构与上图有很大不同。
需要将极数增加到超出图示的数量以产生更小的步距角。还希望减少绕组的数量,或者至少不增加绕组的数量,以便于制造。
施工
永磁步进电机的结构与上图有很大不同。需要将极数增加到超出图示的数量以产生更小的步距角。还希望减少绕组的数量,或者至少不增加绕组的数量,以便于制造。
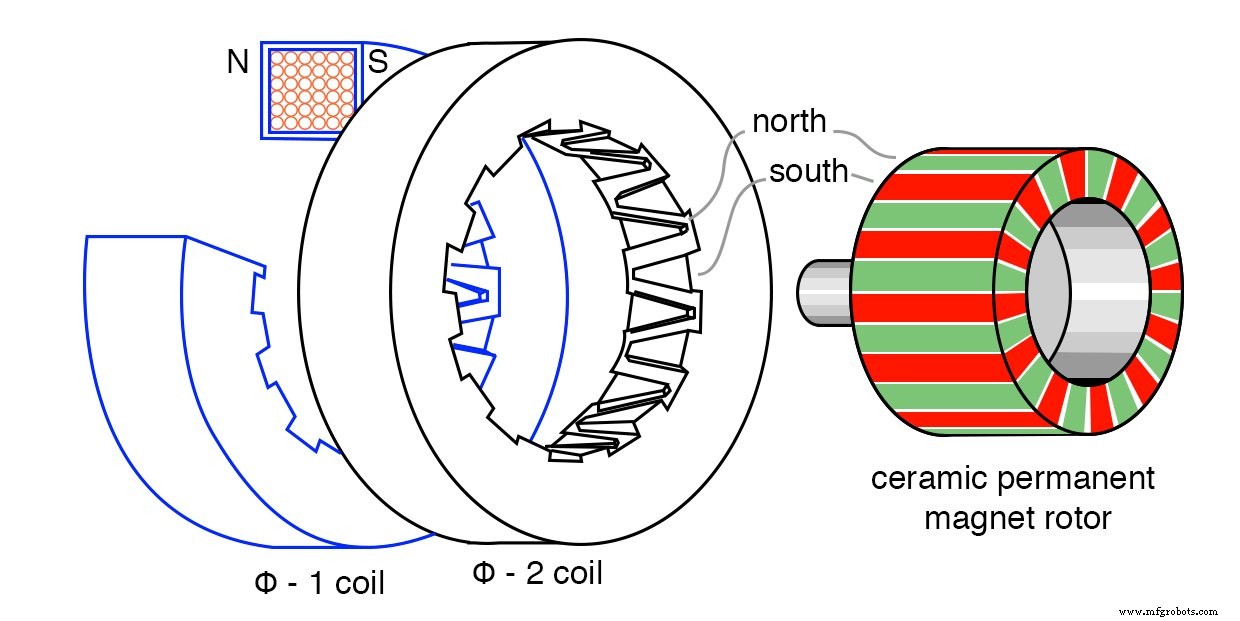
永磁步进电机,24 极筒式结构
永磁步进电机只有两个绕组,但两相各有 24 极。这种结构被称为可以堆叠 .相绕组用低碳钢外壳包裹,手指置于中心。
一个阶段,在短暂的基础上,将有一个北侧和一个南侧。每一边都用十二个交叉手指环绕到甜甜圈的中心,总共 24 个极点。这些交替的南北手指将吸引永磁转子。
如果反相,转子会跳360
应用上述任何一种波形都会使永磁转子旋转。
请注意,转子是一个灰色铁氧体陶瓷圆柱体,以所示的 24 极模式磁化。这可以通过贴在纸包装上的磁铁观察膜或铁屑来观察。不过,电影中北极和南极的颜色都会是绿色的。
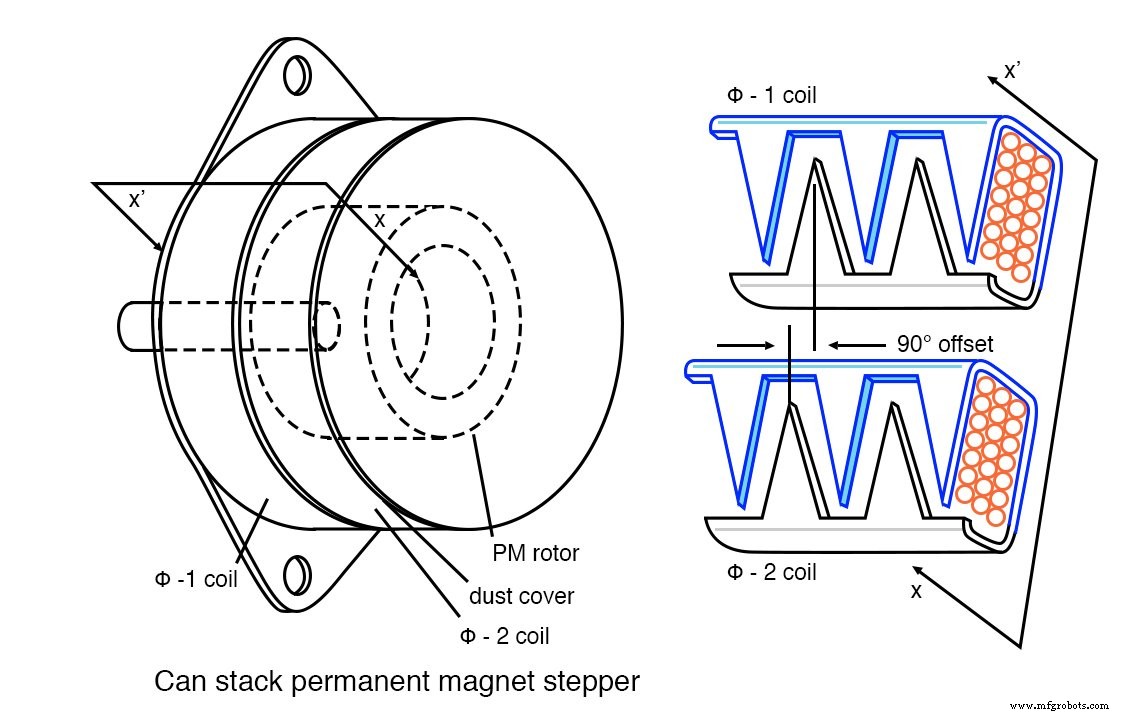
(a) 罐堆外视图,(b) 字段偏移细节
PM 步进器的罐式堆叠式结构与众不同,易于通过堆叠的“罐”(上图)识别。注意两相部分之间的旋转偏移。这是使转子跟随两相磁场切换的关键。
总结:永磁步进电机
- 转子是一个永磁体,通常是一个多极磁化的铁氧体套筒。
- 罐式堆叠结构从一个带有交错的软铁指状线圈的单个线圈提供了多个磁极。
- 大到中等步距角。
- 常用于计算机打印机以推进纸张。
混合步进电机
混合步进电机 结合了可变磁阻步进器和永磁步进器的特性,以产生更小的步距角。转子为圆柱形永磁体,沿轴向磁化,带有径向软铁齿。
定子线圈缠绕在具有相应齿的交替极上。通常有两个绕组相分布在极对之间。对于单极驱动,该绕组可以是中心抽头的。中心抽头通过双线绕组实现 , 一对线在物理上并联但串联。
当相驱动电流反向时,一相的南北两极互换极性。未抽头绕组需要双极驱动。
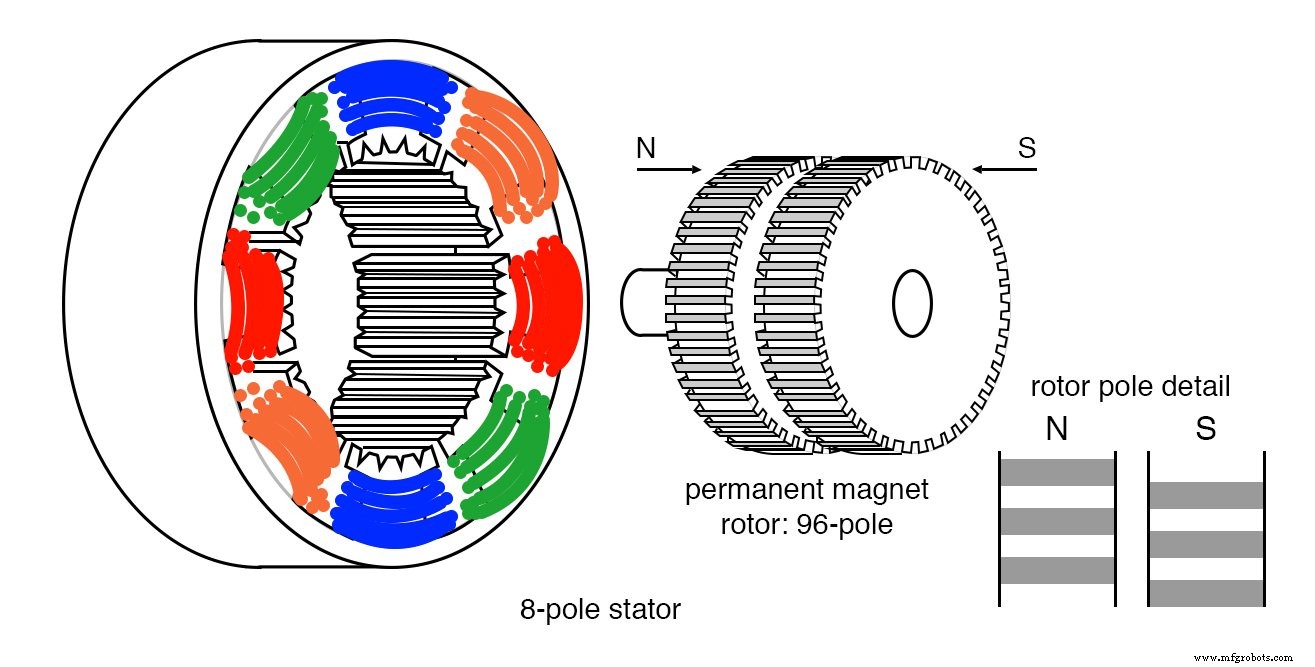
混合步进电机
请注意,一个转子部分上的 48 个齿与另一个部分偏移了半个节距。 (参见上面的转子磁极细节。转子齿偏移也如下所示。)由于这种偏移,转子实际上有 96 个相反极性的交错极。
该偏移允许通过反转一相的场极性以 1/96 转步长进行旋转。两相绕组很常见,如下图所示。不过,可能有多达五个阶段。
8极上的定子齿对应48个转子的齿,除了极间空间缺失的齿。因此,转子的一个极,比如说南极,可以在 48 个不同的位置与定子对齐。但是南极的齿比北齿偏移了半个齿。
因此,转子可以在 96 个不同的位置与定子对齐。这个半齿偏移显示在上图或下图的转子磁极细节中。
好像这还不够复杂,定子主极分为两相(φ-1、φ-2)。这些定子相位彼此偏移四分之一齿。该细节仅在下面的示意图中可见。结果是当相交替通电时,转子以四分之一齿的步长移动。
也就是说,上述步进电机转子每转2×96=192步。
上图代表了实际的混合式步进电机。然而,我们提供了一个简化的图片和示意图来说明上面不明显的细节。为简单起见,请注意减少了转子和定子中的线圈和齿数。
在接下来的两幅图中,我们试图说明由四分之一齿偏移的两个定子相位和转子半齿偏移所产生的四分之一齿旋转。四分之一齿定子偏移与驱动电流时序相结合也定义了旋转方向。
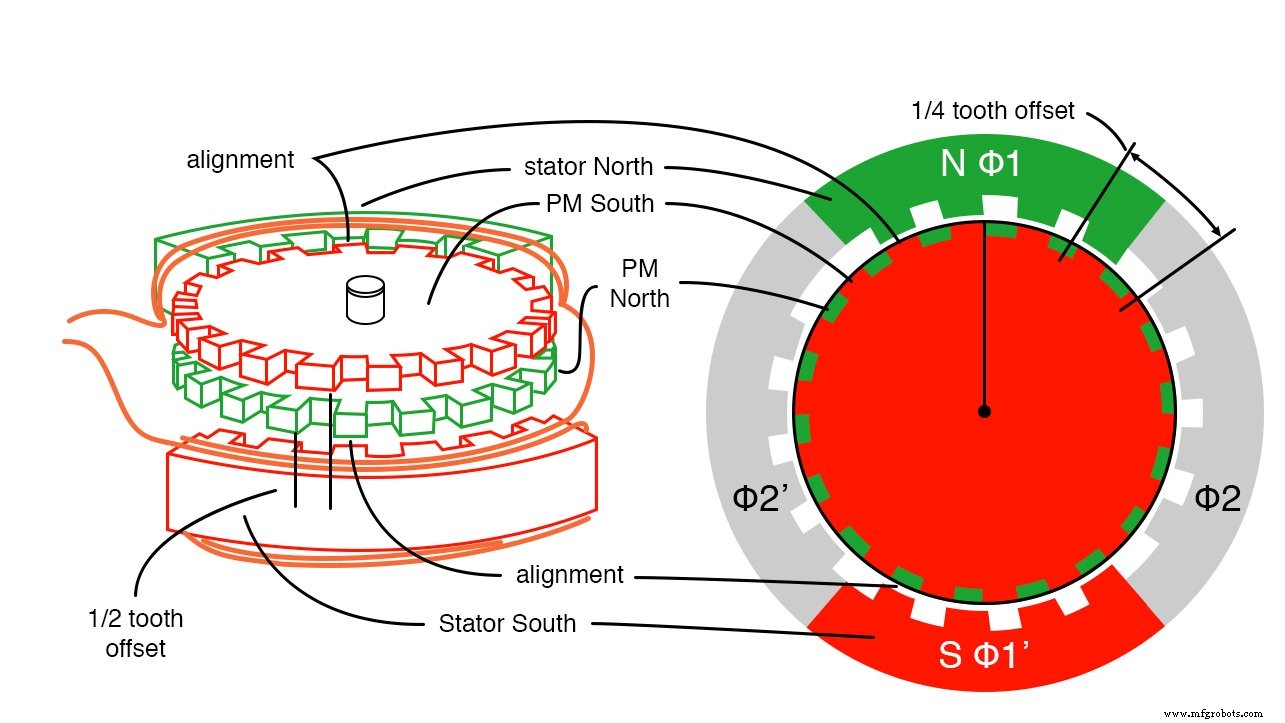
混合式步进电机原理图
混合步进器原理图的特点
- 永磁转子的顶部是南极,底部是北极。
- 转子南北齿偏移半个齿。
- 如果 φ-1 定子在北上、南下暂时通电。
- 顶部 φ-1 定子齿与转子顶部南齿向北对齐。
- 底部 φ-1' 定子齿与转子底部北齿向南对齐。
- 施加到轴上的足够扭矩来克服保持扭矩会使转子移动一个齿。
- 如果 φ-1 的极性颠倒,转子将移动二分之一齿,方向未知。对齐方式是南定子顶部到北转子底部,北定子底部到南转子。
- 当 φ-1 通电时,φ-2 定子齿与转子齿不对齐。实际上,φ-2 定子齿偏移了四分之一齿。如果 φ-1 断电而 φ-2 通电,这将允许旋转该量。 φ-1 和驱动器的极性决定了旋转方向。
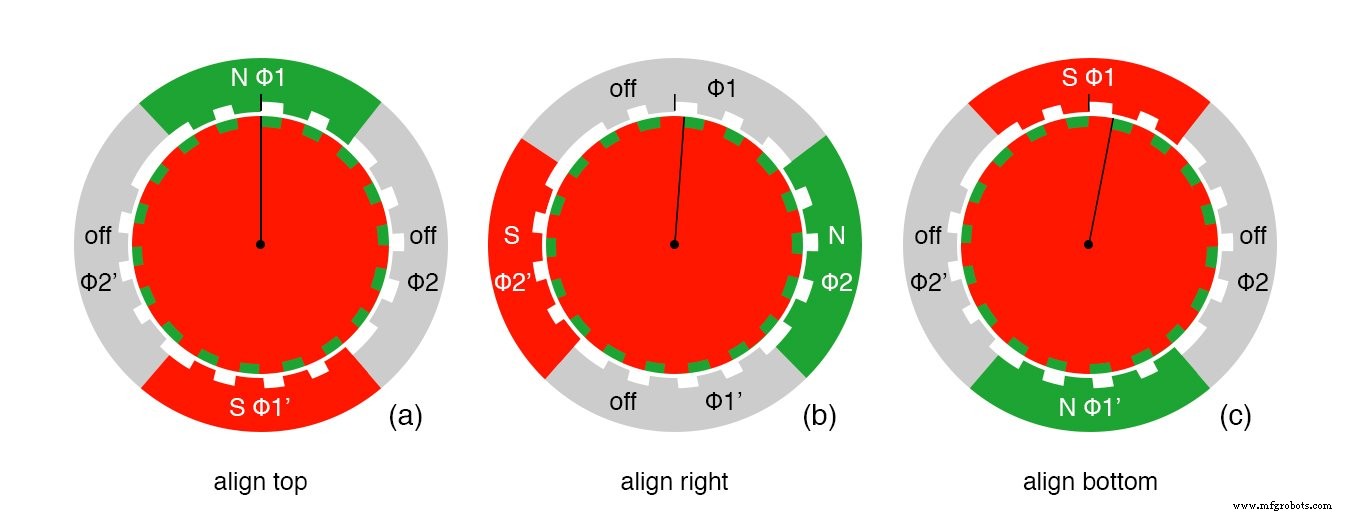
混合步进电机旋转顺序
混合步进电机旋转
- 转子顶部为永磁体南,底部为北。场 φ1、φ-2 可切换:开、关、反转。
- (a) φ-1=开=北顶,φ-2=关。 对齐(从上到下): φ-1 定子-N:转子-顶部-S,φ-1’定子-S:转子-底部-N。起始位置,旋转=0。
- (b) φ-1=关,φ-2=开。 对齐(从右到左): φ-2 定子-N-右:转子-顶部-S,φ-2' 定子-S:转子-底部-N。旋转 1/4 齿,总旋转 =1/4 齿。
- (c) φ-1=反向(开),φ-2=关。 对齐(从下到上): φ-1定子-S:转子-底部-N,φ-1’定子-N:转子-顶部-S。从最后一个位置旋转 1/4 个齿。从开始的总旋转:1/2 齿。
- 未显示:φ-1=关闭,φ-2=反向(开启)。 对齐(从左到右): 总旋转:3/4 齿。
- 未显示:φ-1=on,φ-2=off(与 (a) 相同)。 对齐(从上到下): 总旋转 1 齿。
具有制动扭矩的无动力步进电机是永磁步进电机或混合步进电机。混合步进器的步距角很小,远小于 7.5° 永磁步进电机。步距角可以是几分之一度,对应于每转几百步。 总结:混合式步进电机
- 步距角小于可变磁阻或永磁步进器。
- 转子是带有细齿的永磁体。南北齿偏移半个齿以获得更小的步距角。
- 定子极具有与转子相同节距的匹配细齿。
- 定子绕组分为不少于两相。
- 一个定子绕组的磁极偏移四分之一齿以获得更小的步距角。
相关工作表:
- 步进电机工作表
工业技术