

无刷直流电机
无刷直流电机是从传统的有刷直流电机发展而来的,具有固态功率半导体的可用性。那么,为什么我们要在交流电机的一章中讨论无刷直流电机?
无刷直流电机类似于交流同步电机。主要区别在于同步电机产生正弦反电动势EMF ,与用于无刷直流电机的矩形或梯形反电动势相比。
两者都有定子产生旋转磁场,在磁转子中产生扭矩。
同步电机通常是多千瓦的大型电机,通常带有电磁转子。真正的同步电机被认为是单速的,是电力线频率的约数。无刷直流电机往往很小——几瓦到几十瓦,带有永磁转子。
无刷直流电机的速度不是固定的,除非由一个从属于参考频率的锁相环驱动。建筑风格为圆柱形或煎饼。
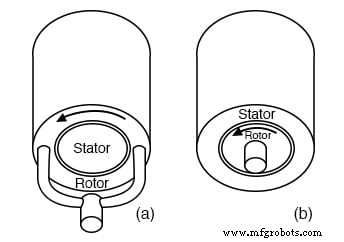
圆柱形结构:(a) 外转子,(b) 内转子
最常见的圆柱形结构可以采用两种形式(上图)。最常见的圆柱形样式是转子在内侧,右上方。这种类型的电机用于硬盘驱动器。也可以将转子放在定子周围。
没有轴的无刷直流风扇电机就是这种情况。这种建筑风格可能又短又粗。然而,磁通的方向相对于旋转轴是径向的。
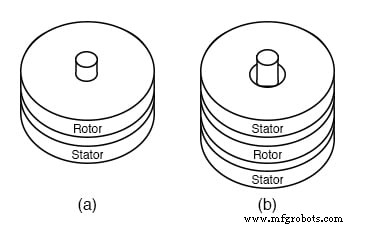
扁平电机结构:(a) 单定子,(b) 双定子
大扭矩扁平电机可能在转子的两侧都有定子线圈(上图-b)。
低扭矩应用(如软盘驱动电机)在转子一侧有一个定子线圈就足够了(上图 a)。磁通方向为轴向,即平行于旋转轴。
换向功能可由各种轴位置传感器执行:光学编码器、磁编码器(旋转变压器、同步器等)或霍尔效应磁传感器。小型廉价电机使用霍尔效应传感器。
霍尔效应传感器是一种半导体器件,其中电子流受到垂直于电流流动方向的磁场的影响。它看起来像一个四端可变电阻网络。两个输出端的电压是互补的。
对传感器施加磁场会导致输出电压发生微小变化。霍尔输出可以驱动比较器以提供对功率器件的更稳定的驱动。或者,如果偏置适当,它可以驱动复合晶体管级。
更现代的霍尔效应传感器可能包含集成放大器和数字电路。这种 3 引线器件可以直接驱动为相绕组供电的功率晶体管。传感器必须安装在靠近永磁转子的位置以感应其位置。

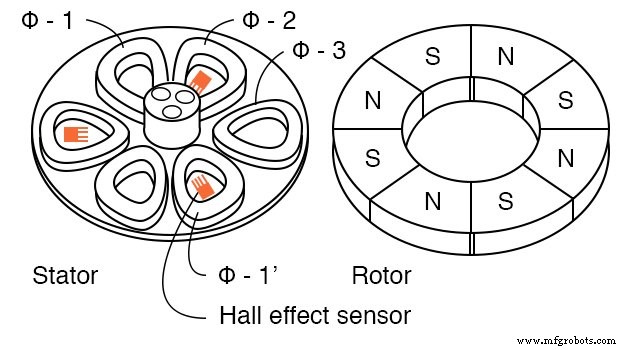
霍尔效应传感器整流 3-φ 无刷直流电机
简单的圆柱形 3-φ 电机(上图)由霍尔效应器件换向,用于三个定子相中的每一相。随着通过的转子磁极极性的变化,永磁转子的位置变化由霍尔器件感应。
该霍尔信号被放大,以便以适当的电流驱动定子线圈。此处未显示,可通过组合逻辑处理霍尔信号以获得更高效的驱动波形。
上述圆柱形电机如果配备锁相环(PLL)以保持恒定速度,则可以驱动硬盘驱动器。类似的电路可以驱动薄饼软盘驱动电机(下图)。同样,它需要一个 PLL 来保持恒定速度。
无刷煎饼电机
3-φ 煎饼电机有 6 个定子极和 8 个转子极。转子是一个扁平的铁氧体环,由八个轴向磁化交替磁极磁化。我们没有显示转子由低碳钢板盖住,用于安装到定子中间的轴承上。
钢板还有助于完成磁路。定子磁极也安装在钢板上,有助于闭合磁路。
扁平定子线圈是梯形的,以更紧密地贴合线圈,并接近转子磁极。 6定子线圈包括三个绕组相。
如果三个定子相连续通电,就会产生旋转磁场。
永磁转子将跟在同步电机的情况下一样。二极转子将以与旋转磁场相同的旋转速率跟随该磁场。但是,由于转子中有额外的极,我们的 8 极转子将以该速率的约数旋转。
无刷直流风扇电机具有以下特点:

无刷风扇电机,2-φ
- 定子有 2 相分布在 4 极之间
- 有 4 个没有绕组的凸极以消除零扭矩点。
- 转子有四个主驱动极。
- 转子具有叠加的 8 极,以帮助消除零扭矩点。
- 霍尔效应传感器的物理间距为 45o。
- 风扇外壳位于转子的顶部,转子位于定子之上。
无刷风扇电机的目标是最小化制造成本。这是将低性能产品从 3-φ 配置转移到 2-φ 配置的动机。根据它的驱动方式,它可能被称为4-φ电机。
您可能还记得,如果传统直流电机要自启动,则它们的电枢极数不能为偶数(2、4 等),通常为 3、5、7。因此,假设的 4 极电机可能会在扭矩最小值处静止,而不能从静止状态启动。
添加四个没有绕组的小凸极会在转矩与位置曲线上叠加一个脉动转矩。当将此脉动转矩加入正常的通电转矩曲线时,结果是转矩最小值被部分去除。
这使得可以在所有可能的停止位置启动电机。在普通四极永磁转子上增加八个永磁极,在普通四极纹波转矩上叠加了一个很小的二次谐波纹波转矩。
这进一步消除了扭矩最小值。只要扭矩最小值不降为零,我们应该能够启动电机。我们在消除扭矩最小值方面越成功,电机启动就越容易。
2-φ 定子要求霍尔传感器间隔 90° 电气。如果转子是 2 极转子,霍尔传感器将放置 90° 身体的。由于我们有一个 4 极永磁转子,传感器必须放置在 45° 物理达到 90° 电气间距。 (注意上面的霍尔间距。)
大部分转矩是由于内部定子 2-φ 线圈与转子的 4 极部分的相互作用。此外,转子的 4 极部分必须在底部,以便霍尔传感器能够感应到正确的换向信号。
8极转子部分仅用于改善电机启动。

无刷直流电机2-φ推挽驱动
在上图中,2-φ 推挽驱动器(也称为 4-φ 驱动器)使用两个霍尔效应传感器驱动四个绕组。传感器间隔 90° 电气分开,即 90° 单极转子物理。
由于霍尔传感器有两个互补输出,一个传感器为两个相反的绕组提供换向。
工业技术