

危险环境中的协作机器人
近年来,技术取得了长足的进步,其中包括优化和改进生产流程以及提高工作安全性。 机器人面临的巨大挑战之一 今天是改善工作环境,实现安全环境。一般来说,工业流程的自动化使操作员工作更安全,改善工作条件 并将它们从危险环境中移除 .
在本博客中,我们将了解协作机器人如何让我们以自动化的方式执行危险任务。这实现了这些过程以更快、更安全的方式进行,大大降低了操作员的风险。
什么是协作机器人?
协作机器人,也称为“cobots”,旨在与同一工作场所的操作员一起工作,从而可以结合每个人带来的优势。
协作机器人广泛部署在各种工厂中以执行不同的任务。它们是数字化和工业 4.0 的关键要素。协作机器人允许自动化乏味的任务,这些任务不会为产品增加价值。换句话说,协作机器人扮演着工人助手的角色。

他们不仅执行传统的机器人任务 还可以添加不同的传感器,例如摄像头、温度传感器、力传感器 等等。可以执行更复杂的任务,而到目前为止,以自动化方式完成这些任务是不可想象的。这意味着,机器人变得更聪明 .
协作机器人的优势
协作机器人具有很大的优势,可以在各种环境中使用,也可以用于其他工业机器人无法解决的任务。
- 他们不需要复杂的电气装置 并且可以连接到几乎任何插座。它们易于组装且直观。
- 它们非常灵活 并且可以搬迁 在不修改生产计划的情况下执行新任务。它们还允许您重复使用程序并在同一条生产线上自动执行多项任务。
- 协作机器人编程非常直观 且易于实施。
- 协作机器人可用于所有类型的行业和环境。此外,它们还支持多种类型的末端执行器 高效、快速地适应每项任务。
- 它们是安全的 并且允许自动化导致伤害的流程和繁重的任务 并且不要为流程增加价值。
如您所见,协作机器人具有使它们适合自动化许多任务的优势。其中对人来说是危险而乏味的任务。
协作机器人和危险任务
协作机器人可以承担潜在危险并使人们处于危险之中的任务,无论是处理危险部件还是在苛刻中工作 环境 ,或因不良的人体工程学造成的伤害 .机器人技术在这方面具有巨大潜力,因为它可以提高安全性 .机器人可以执行重复性和危险性的任务,而这些任务是人类无法执行的或涉及高风险的。它们还允许您在有限的空间或极端环境中执行任务。
在危险环境中仍然存在许多挑战,这些挑战需要自动化,或者由于它们带来的风险而需要自主完成。出于这个原因,开发了完全自主和远程操作的机器人系统。
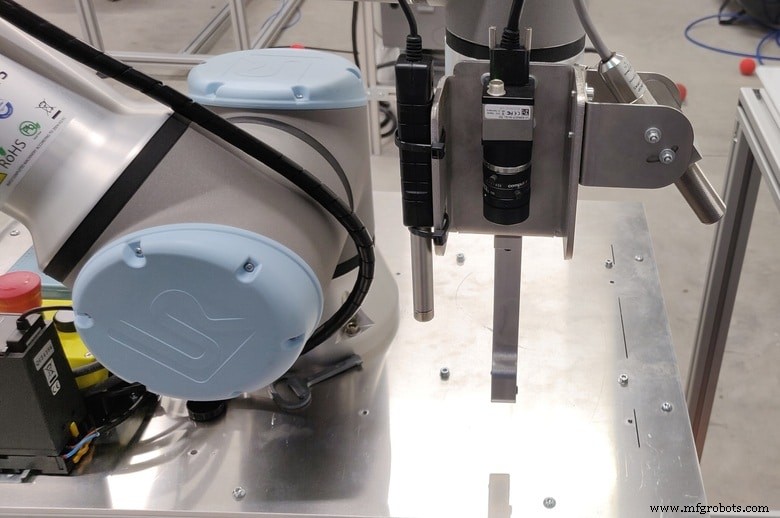
近年来,机器人的进步是基于智能传感器、人工智能和模块化机械系统的发展。因此,存在完全自主的机器人系统 对外界刺激作出反应、避开障碍物、修正轨迹等,并能在高温等危险环境中工作 区域或处理危险物品。例如,在这里你可以看到一个项目 其中刀片的处理对操作员来说是一个非常高的风险。
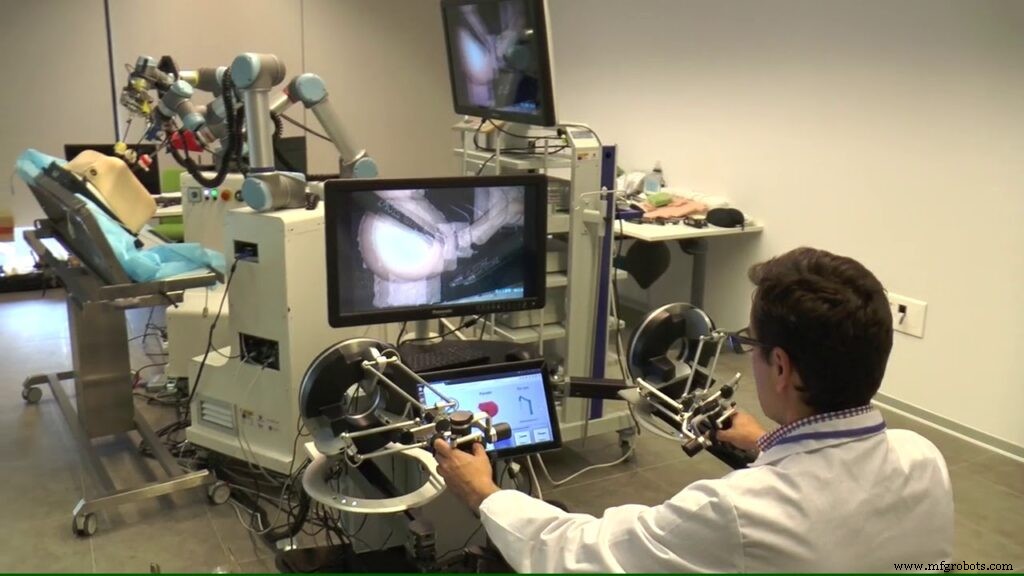
另一方面,有远程操作系统 通过触觉输入设备(主机)将机器人(从机)的控制权传递给人。目前,有模拟系统和虚拟现实可以促进特定机电工具和机器人干预的准备,包括恢复场景和故障分析模式,并允许培训控制此类系统的人员。遥控机器人的一个例子可以是无人机或医疗领域用于执行操作的机器人。
危险环境中的自主机器人
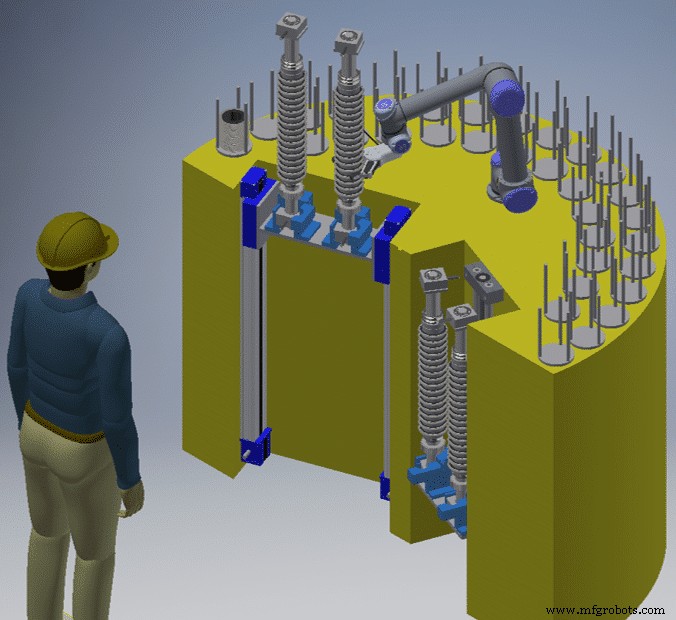
除了协作机器人,我们还想向您介绍全自动机器人。在能源等许多在危险环境中工作的行业,例如核电站或石油平台 ,有必要进行维修保养 对工人有潜在危险的任务。在其他情况下,必须在难以到达的地方进行操作 是人们无法访问的。为此,使用了具有非常多样化配置的自主机器人,它们能够在危险环境中移动并执行对工人有风险的任务。这些机器人能够以高度的精度和灵活性执行维修和维护任务。

这种类型最著名的发展之一是波士顿动力公司的机器狗 Spot ,已经在实际环境中使用过。 Spot 设计用于潜在危险环境,例如在泵警报位置或化学气体泄漏处进行检查。

简而言之,我们已经看到机器人技术的进步使得自动化对人构成风险的任务成为可能,同时也允许在危险环境中工作。这项技术在未来可能会变得更准确、更容易获得。
您想在任何项目的危险环境中应用机器人技术吗? 联系我们!
工业机器人