

联系“正常”状态和接通/断开序列
任何种类的开关触点都可以设计成在动作时触点“闭合”(建立连续性),或在动作时“打开”(中断连续性)。
对于其中具有弹簧复位机构的开关,弹簧在不施加力的情况下使其返回的方向称为法线 位置。
因此,在此位置打开的触点称为常开 在此位置闭合的触点称为常闭 .
“正常”进程切换条件
对于过程开关,正常位置或状态是开关在不受过程影响时所处的位置。
确定进程交换机正常状况的一种简单方法是考虑交换机在未安装的存储架上时的状态。以下是“正常”进程切换条件的一些示例:
- 速度开关: 轴不转动
- 压力开关 :零施加压力
- 温度开关 :环境(室温)温度
- 液位开关 :空水箱或垃圾桶
- 流量开关 :零液体流量
在操作过程中区分开关的“正常”状态和“正常”使用是很重要的。
以在冷却水系统中用作低流量警报的液体流量开关为例。
冷却水系统的正常或正常运行条件是有相当恒定的冷却剂流过该管道。
如果我们希望流量开关的触点在冷却剂流量丢失的情况下关闭(例如,完成一个激活警报器的电路),我们将需要使用常闭 而不是常开触点。
当管道中有足够的流量时,开关的触点被强制打开;当流量下降到异常低的水平时,触点恢复正常(闭合)状态。
如果您将“正常”视为流程的常规状态,这会令人困惑,因此请务必始终将交换机的“正常”状态视为它在架子上时所处的状态。
开关的示意图符号
开关的原理图符号根据开关的用途和驱动而变化。
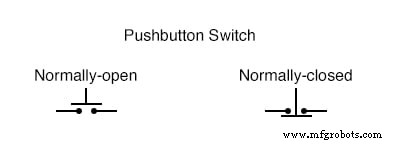
常开开关触点以表示打开连接的方式绘制,准备在启动时关闭。相反,常闭开关被绘制为闭合连接,在启动时将打开。请注意以下符号:
任何开关触点也有一个通用符号系统,使用一对垂直线表示开关中的触点。
常开触点用不接触的线表示,而常闭触点用两条线之间的对角线表示。比较两者:
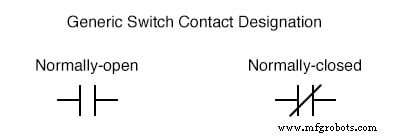
左侧的开关在启动时关闭,在“正常”(未启动)位置时打开。右侧的开关在启动时打开,在“正常”(未启动)位置关闭。
如果开关用这些通用符号指定,开关的类型通常会在符号旁边的文本中注明。请注意,不要将左侧的符号与电容器的符号混淆。如果需要在控制逻辑原理图中表示电容器,则显示如下:
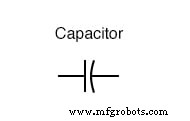
在标准的电子符号中,上图是为极性敏感电容器保留的。
在控制逻辑符号体系中,该电容器符号用于任何类型的电容器,即使该电容器对极性不敏感,以便与常开开关触点明确区分。
多个位置选择器开关
对于多位置选择器开关,必须考虑另一个设计因素:即随着开关从一个位置移动到另一个位置,断开旧连接和建立新连接的顺序,动触点依次接触几个静触点。
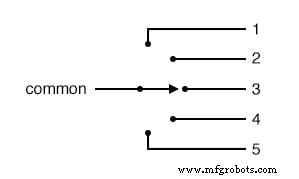
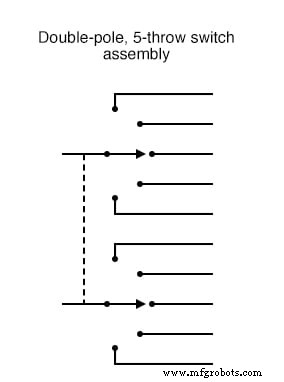
上面显示的选择器开关将公共接触杆切换到五个不同位置之一,以接触编号为 1 到 5 的电线。
像这样的多位置开关最常见的配置是在与下一个位置接触之前断开一个位置的接触。
这个配置叫做break-before-make .举个例子,如果开关设置在 3 号位置并顺时针缓慢转动,接触杆将离开 3 号位置,打开该电路,移动到 3 号和 4 号之间的位置(两条电路路径都打开),然后触摸位置 4,关闭该电路。
在某些应用中,任何时候都不能完全断开连接到“公共”导线的电路。
对于这样的应用程序,make-before-break 可以构建开关设计,其中可动触点杆在两个位置之间移动时实际上桥接在两个触点位置之间(在上述场景中,在 3 号和 4 号之间)。
这里的折衷方式是电路必须能够容忍相邻位置触头(1和2,2和3,3和4,4,4,4,4和5)之间的开关闭合,因为选择器旋钮从位置转到位置。此处显示了这样的开关:
当可动触点可以通过固定触点进入多个位置之一时,这些位置有时称为投掷 .
活动触点的数量有时称为极数。上面显示的带有一个动触头和五个静触头的选择器开关将被指定为“单刀五掷”开关。
如果将两个相同的单刀五掷开关机械组合在一起,以便它们由相同的机构驱动,则整个组件将被称为“双刀五掷”开关:
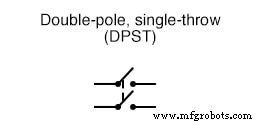
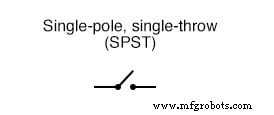
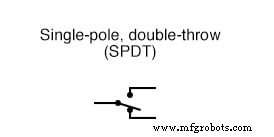
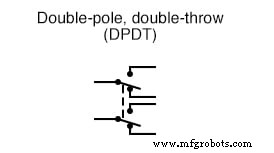
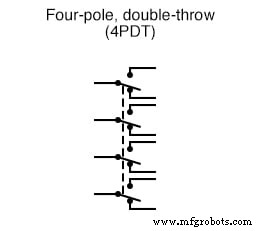
以下是一些常见的开关配置及其缩写名称:
评论:
-
正常 开关的状态是未启动的状态。对于进程开关,这是它坐在架子上、卸载时的状态。
- 未启动时打开的开关称为常开 .未启动时闭合的开关称为常闭 .有时术语“常开”和“常闭”缩写为 N.O.和北卡罗来纳州,分别。
- N.O. 的通用符号系统和常闭开关触点如下:
- 多位置开关可以是先开后合(最常见)或先开后开。
- 开关的“极数”是指动触点的数量,而开关的“行程”是指每个动触点的静触点数量。
相关工作表:
- 延时机电继电器工作表
- 切换工作表
- 基本电磁继电器工作表
工业技术