

飞行时间传感器 (ToF) 如何工作? ToF 3D 相机概览
飞行时间传感器如何确定距离?使用示例 3D 相机详细了解 ToF 相机。
飞行时间传感器如何确定距离?使用示例 3D 相机详细了解 ToF 相机。
三种领先的 3D 成像技术正在争夺手机和汽车的空间。这些技术是立体成像、结构光投影和飞行时间(或 ToF)相机。这些设备生成的数据可以提供行人检测、基于面部特征对用户进行身份验证、检测手部运动并提供给 SLAM(同时定位和映射)算法。
这个领域的两个最大的参与者是 ams 和英飞凌。在撰写本文时,ams 为每种类型的传感器配备一个,而英飞凌仅专注于飞行时间传感器。
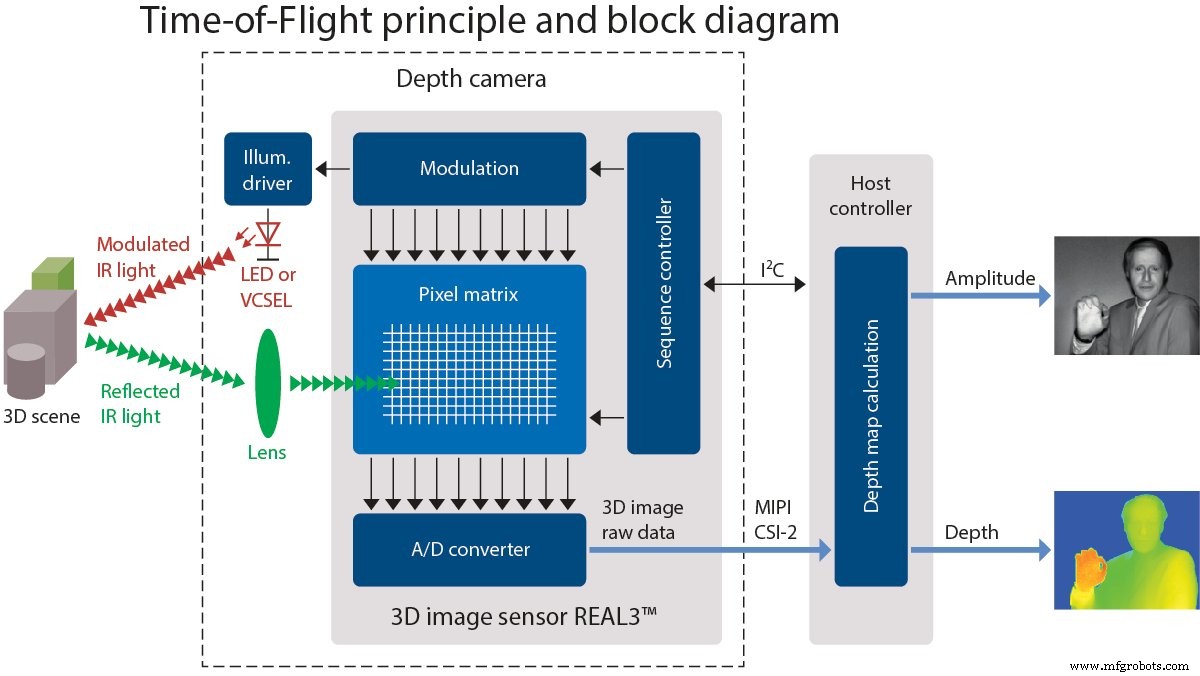
本文通过重点介绍来自 pmdtechnologies 的 3D 相机开发套件“pico flexx”来描述飞行时间传感器背后的技术。 (在您询问之前,“pico flexx”和“pmdtechnologies”在其网站上均以小写形式显示。)。
pico flexx 围绕英飞凌和 pmd 联合开发的 3D 图像传感器 REAL3 构建。
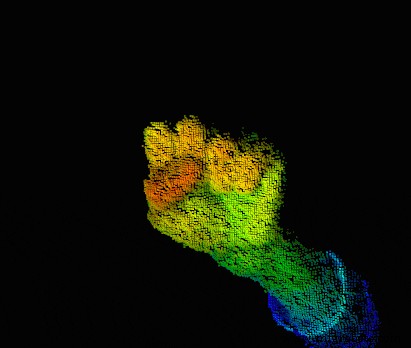
2019 年 4 月 29 日从 pmdtec.com 拍摄的手部假彩色 3D 图像。颜色根据传感器到手部的距离映射到各个像素(红色近,蓝色远)
请注意,pmd 为我们提供了这篇文章的设备。
什么是飞行时间传感器?
飞行时间传感器测量某物在介质中传播一段距离所需的时间。通常,这是对波脉冲发射、从物体反射到返回到 ToF 传感器之间经过的时间的测量。飞行时间相机是一种利用 ToF 测量来确定相机与物体或环境之间距离的设备,从而创建由单独测量的点生成的图像。
ToF 相机的应用包括基于激光的无扫描仪 LiDAR 成像系统、运动传感和跟踪、机器视觉和自动驾驶的物体检测、地形测绘等。
但是这些测量是如何实现的?
下面,我展示了三种使用旅行时间确定距离的方法。
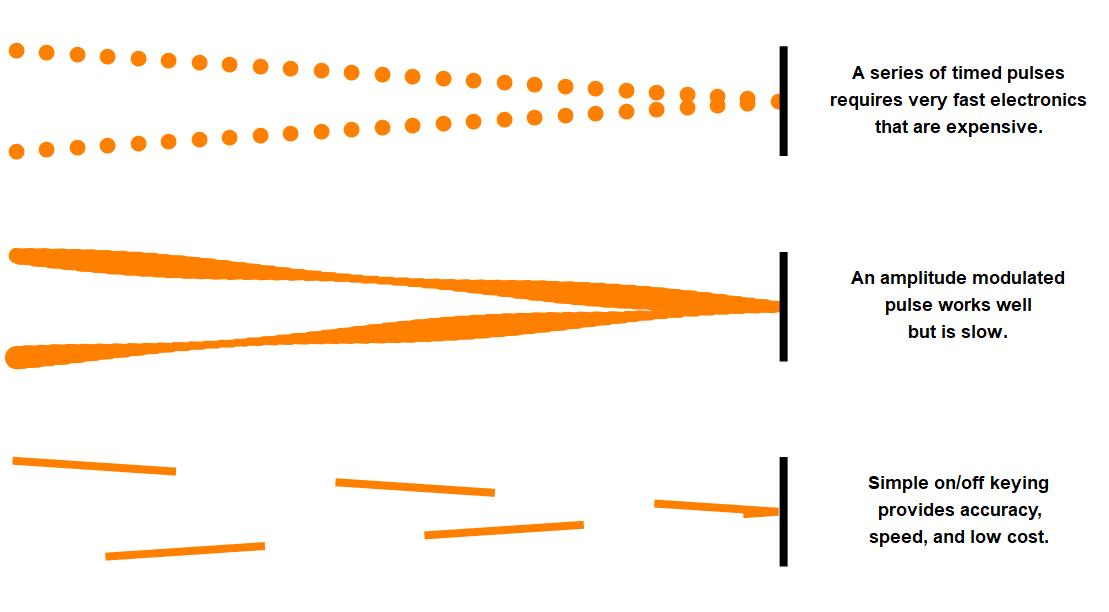
使用旅行时间确定距离的方法
在图像的顶部,您可以看到第一种方法,即发送脉冲并测量反射后返回的时间间隔。
图像中间显示了第二种方法,您可以调制光源的幅度并记录反射波的相移。
图像底部代表第三种方法,传输50%占空比的方波并记录在特定时间间隔内到达的返回光量。
毫米级精密 ToF 相机
光波和无线电波以近 300,000,000,000 毫米/秒的速度传播,这意味着波传播 1 毫米大约需要 3.3 ps(另外 3.3 ps 返回)。这意味着,如果您想要一个可以对您所在房间内的所有物体进行成像的设备,并且您想要 ~ 1 毫米的分辨率,那么您的计时电子设备将需要皮秒分辨率。这转化为数百 GHz 的时钟速度。
设计在这些频率下工作的电子电路既不简单也不经济,因此如果设计人员希望为消费者带来负担得起的设备,他们必须想出一种在较低频率下工作的方法。
有两种常用方法可以在使用合理的 sub-GHz 频率的同时实现毫米级精度:
- 将正弦调制波的相移与距离相关联
- 使用 50% 占空比方波的相移和差分电压来确定距离
在下面的部分中,我们将更详细地介绍这两种方法。
通过调幅波的相移确定距离
假设您要绘制最大长度为 15 m 的小型办公室或大型客厅。要确定该长度的合适工作频率,请使用 $$c=\lambda \cdot f$$ 其中 c 是光速 (c=3x10 8 m/s),λ 是一个波长(λ=15 m),而 ƒ 是频率。在这个例子中,ƒ=20 MHz,这是一个相对容易使用的频率。
当一束强光的输出被 20 MHz 正弦信号调制时,一切就开始了。光波最终会到达一个物体或墙壁,它会反射并反转方向。原始调制光的较暗版本将返回到接收器。除非物体正好是 15 米以外的整数倍,否则相位会偏移一定量。
相移可用于计算波行进的距离。
如果可以准确测量相位角,就可以准确确定反射物体与传感器/接收器的距离。
如何测量正弦曲线的相位角
那么,如何快速测量正弦波的相位角?这涉及在四个等距点(即 90° 或 1/4 λ 的间隔)处测量接收信号的幅度。
$$\varphi=ArcTan \left ( \frac{A_1-A_3}{A_2-A_4} \right )$$
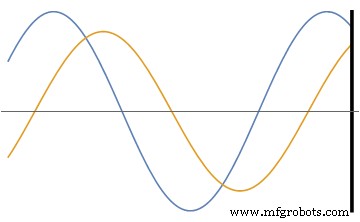
我试图在下面说明测量值与相位角之间的关系。 A1与A3之差与A2与A4之差之比等于相角的正切。 ArcTan 实际上是二元反正切函数,它映射适当的象限,并定义当 A2=A4 和 A1>A3 或 A3>A1 时分别为 0°或 180°。
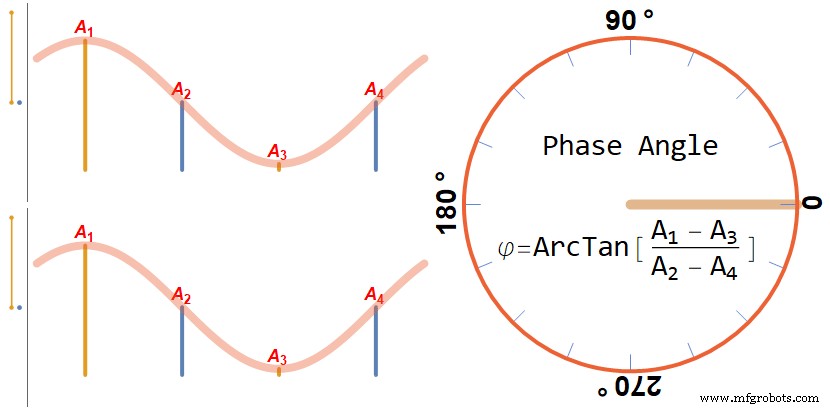
点击图表可查看更复杂的图像,该图像说明变量 A1、A2、A3 和 A4 的差异如何拟合单位圆。
在上图中,图形的最左侧有两条垂直数轴,显示减去 A1 和 A3(以深黄色表示)以及 A2 和 A4(以蓝色表示)的结果。测量值在中间的正弦曲线图中显示为垂直线。
请注意,此图形未考虑反射(这会有效地将所有物体移动 180°)。
确定给定距离的工作频率
回到我们的例子,到目标的距离由以下公式确定:
$$d=\frac{c \cdot \varphi}{4 \pi \cdot f}$$
其中 c 是光速,phi (φ) 是相位角(以弧度为单位),ƒ 是调制频率。
测量光子的实际飞行时间需要 333 GHz 电子设备。此方法最多需要 4 倍的调制频率,在本例中为 4x20 MHz=80 MHz。这是资源的显着减少。但是您会很高兴知道一些聪明的工程师找到了进一步降低最大频率的方法。
通过测量带电电容器的差分电压确定相移
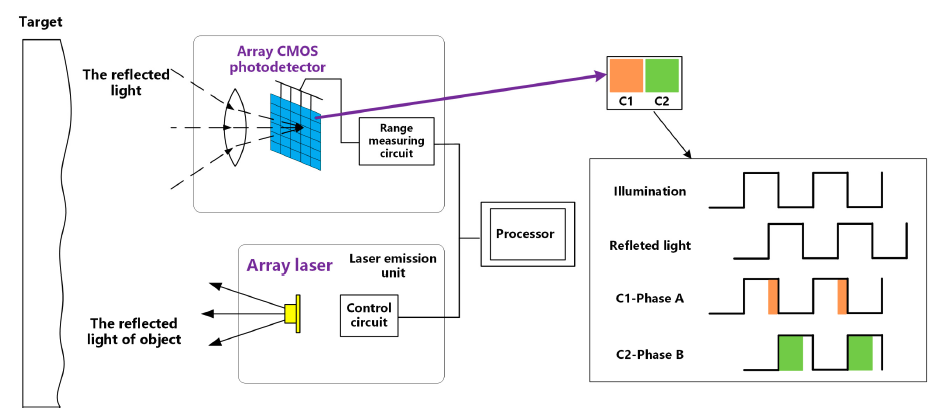
下一个测量情况涉及频闪光源和每像素两个电容器的CMOS成像传感器。
时钟源产生 50% 占空比的方波,该方波控制明亮的频闪光源,以及与每个像素内的电荷存储电容器的连接。
下图展示了此类系统的一个示例:
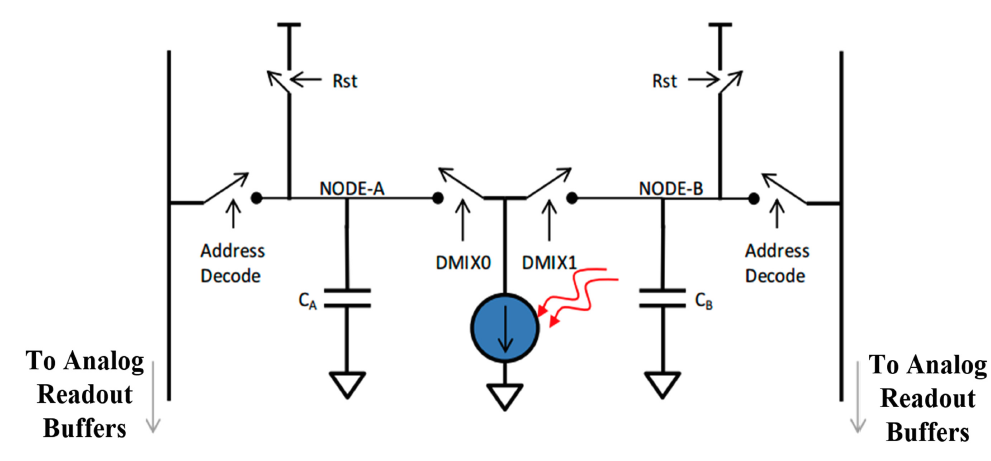
图像来自“用于光子混合器设备固态阵列激光雷达的快速校准方法”这显示了具有两个电荷存储电容器的 CMOS 像素,这些电容器交替连接以记录传入光。
光离开光源,从物体反射,并撞击像素,在那里它会被记录为上图所示的电容器 CA 或 CB 中的电荷。电容器以与照明源相同的频率交替连接到像素,使用相同的时钟源。
这种巧妙的布置意味着电容器中的差分电荷与相位偏移直接相关。并且相位由波长和到目标和返回的距离决定。
图片来自“光子混合器设备固态阵列激光雷达的快速校准方法”
可以根据需要对对象进行多次照明以填充电容器。只要距离不变,电荷比例就会保持不变
运行中的飞行时间传感器
这种方法的效果如何?比你想象的要好。
提供给 AAC 的传感器与随附的软件相结合,能够以高达 45 fps 的速度进行记录。在较低的刷新率下,系统可以轻松地对衬衫上的皱纹进行成像。

上图绘制了从 pmd 的 pico flexx 相机捕获的每个像素的 (x,y,z) 顶点位置。
仅深度数据本身很难可视化。因此,深度图像通常与照片结合,或使用假色显示,以便更容易地可视化场景。
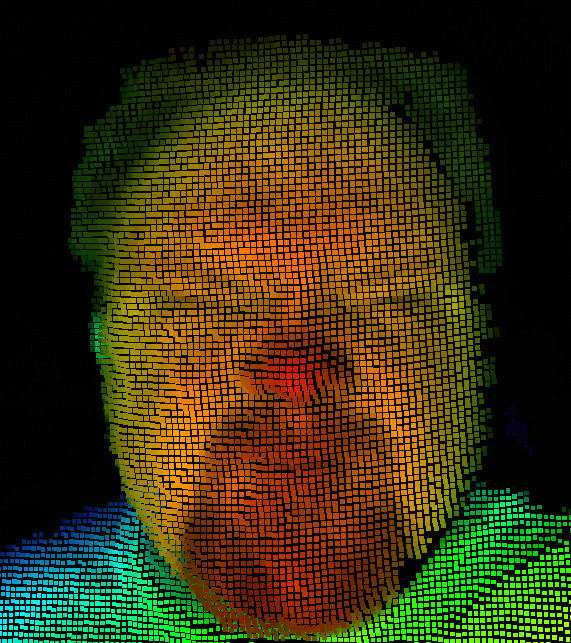
低分辨率图像的假色深度叠加可以更容易地解释场景。使用 pmd 的 Royal Viewer 软件和 CamBoard pico flexx 3D 开发套件捕获的 goober 作者的图像。
飞行时间传感器可用于一系列应用,包括在将巧妙的物理与工程相结合时创建环境的 3D 地图。
您在工作中使用过 3D 相机吗?关于使用飞行时间传感器的设计限制,您能告诉我们什么?在下面的评论中分享您的经验。
工业技术