

供应材料的工业线跟随器
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
必要的工具和机器
 |
| |||
 |
| |||
 |
|
应用和在线服务
| |
| |||
 |
|
关于这个项目
你有没有想过那些在装配线上运输零件的花哨机器人是如何工作的?我在波兰的欧宝工厂看到了这样的机器人,我问了很多问题,他们向我解释了它是如何工作的,我立刻明白这只是一个非常先进的线跟随器。不是黑胶带,而是磁条,不是光传感器,而是磁传感器,还有很多安全功能和其他智能东西。但此时我开始想,也许我可以构建自己的更小、更便宜、基于 Arduino 的开源版本的这样一个机器人,它能够巧妙地运输东西?听起来像是一个很大的挑战,这就是我喜欢的!
设计
首先我设计了它......在纸上!是的,我手里拿着铅笔在纸上设计 :) 如果你有很棒的 CAD 软件,为什么要在纸上设计?我从其他人那里听说了一些优点,然后我自己证实了它们。你真的很自由,纸上没有任何限制,没有干扰,只有空白和一支铅笔,让事情变得非常简单。它也更快你不必担心尺寸和最终形状,如果你不喜欢你画的东西,你可以再画一遍,当你一次看到所有的图画时,你可以把它们组合在一起,然后拿出来有了新想法 :) 在纸上绘制它以找到我喜欢的整体形状,然后跳转到 CAD 为我的绘图添加一些尺寸非常容易。真的向大家推荐这个技术!这是我的画(右边那些彩色线条是我弟弟的儿子创意)
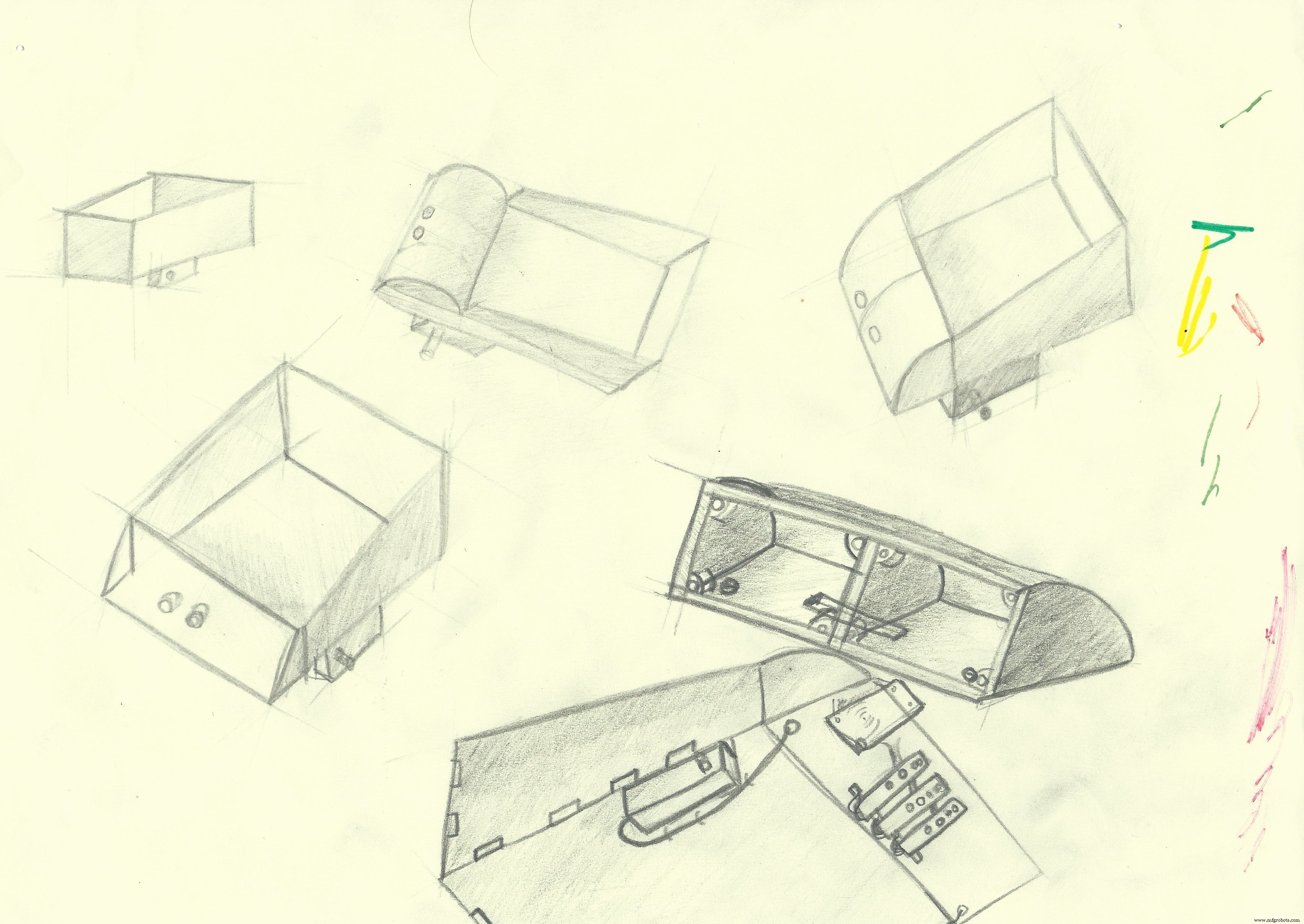
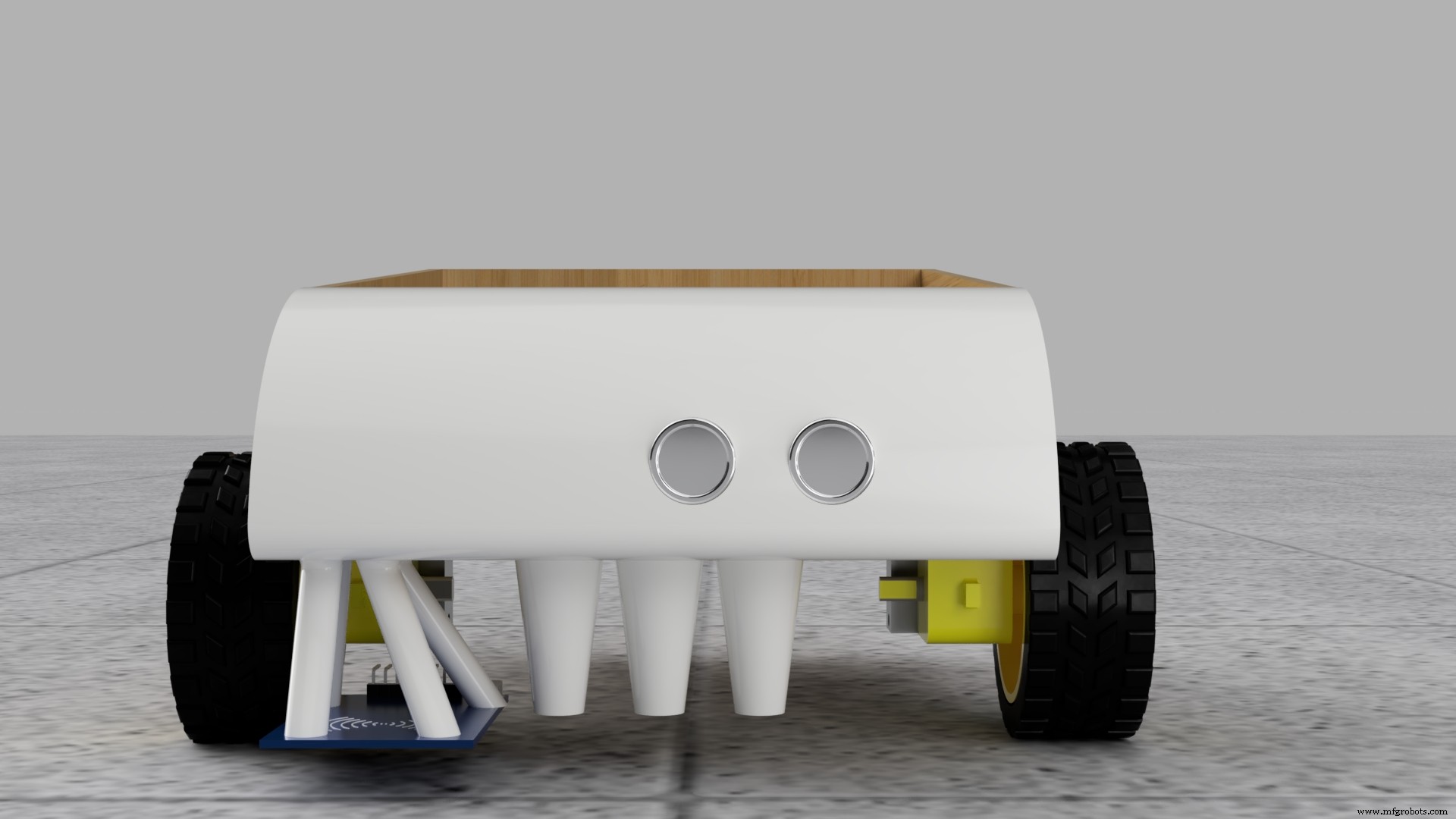
当然,我的画不是很好,如果你能画,你会在 5 分钟内做出更好的东西,但我以前画得很差,上面的例子对我来说很有希望。然后我根据该图纸创建了一个 CAD 设计。我从一开始就知道这个机器人的某些部分将是 3D 打印的,但我不想让它 100% 3D 打印,我想尝试新事物(一如既往)。最后,我决定在激光切割机上切割一些零件,但我没有,而且我从来没有为激光切割设计过一些东西,我学会了如何做到这一点并在网上订购。作为材料,我选择了 4mm 胶合板(您也可以使用 plexi 或类似的东西)。机器人的前部是 3D 打印的,装有所有传感器、电子设备和电池。这是我的设计渲染图,在我看来,它看起来很棒!

下一步是订购这些木板的激光切割,我来自波兰,所以我找到了一家波兰公司,这样做可以节省运费。如果您只想通过 Google 激光切割和您所在城市的名称来查找周围的事物,那么您应该很容易找到周围的事物。请记住询问公司他们是否可以调整这些零件的偏移量,以便手指关节完美贴合(我们必须这样做,因为有一种叫做切口的东西,您可以在此处阅读更多相关信息)。幸运的是,我找到了一家为我处理这件事的公司,谢谢!
我很害怕,因为我从来没有为激光切割设计过,我以前也从未使用过任何激光切割部件,但结果很漂亮:) 可以在下面的附件部分找到用于激光切割的 DXF 文件。
为了完成底盘,我必须在 3D 打印机上打印前部,这是我拥有的工具,所以这对我来说不是问题,如果您还没有 3D 打印机,请考虑购买一个,它们非常好现在便宜。您可以在学校或图书馆找到一个,或者您的一位朋友是 3D 打印爱好者。 STL 文件可以在下面的附件部分找到。 3D 打印没有任何特定设置,我使用了 2 个周长,填充率为 30%,层高为 0.2mm,您必须使用支撑来打印这部分。大约需要 8 小时,请耐心等待。
打印完成后,您可以将其清理干净并拧到胶合板部件上,但我决定再做一些工作。再说一次,这是我以前从未做过的事情,我打磨我的印刷品并涂漆,再次打磨并涂漆,然后我使用汽车填料使表面完美,然后再打磨和喷漆。花了很多时间,但我也学到了很多,看看这闪亮的表面!太完美了,你根本看不出它是 3D 打印出来的! 2天的绘画和打磨,绝对值得。
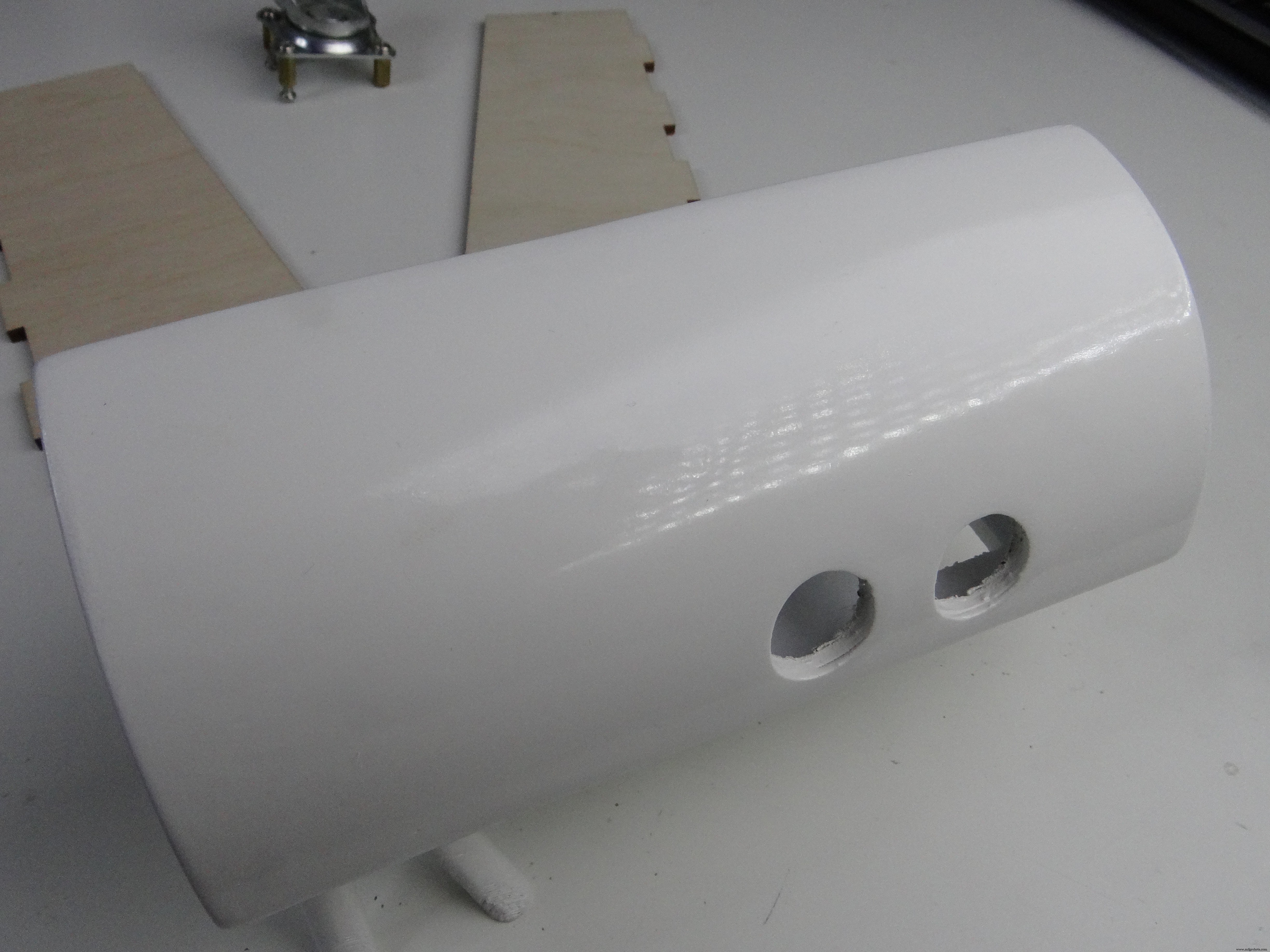
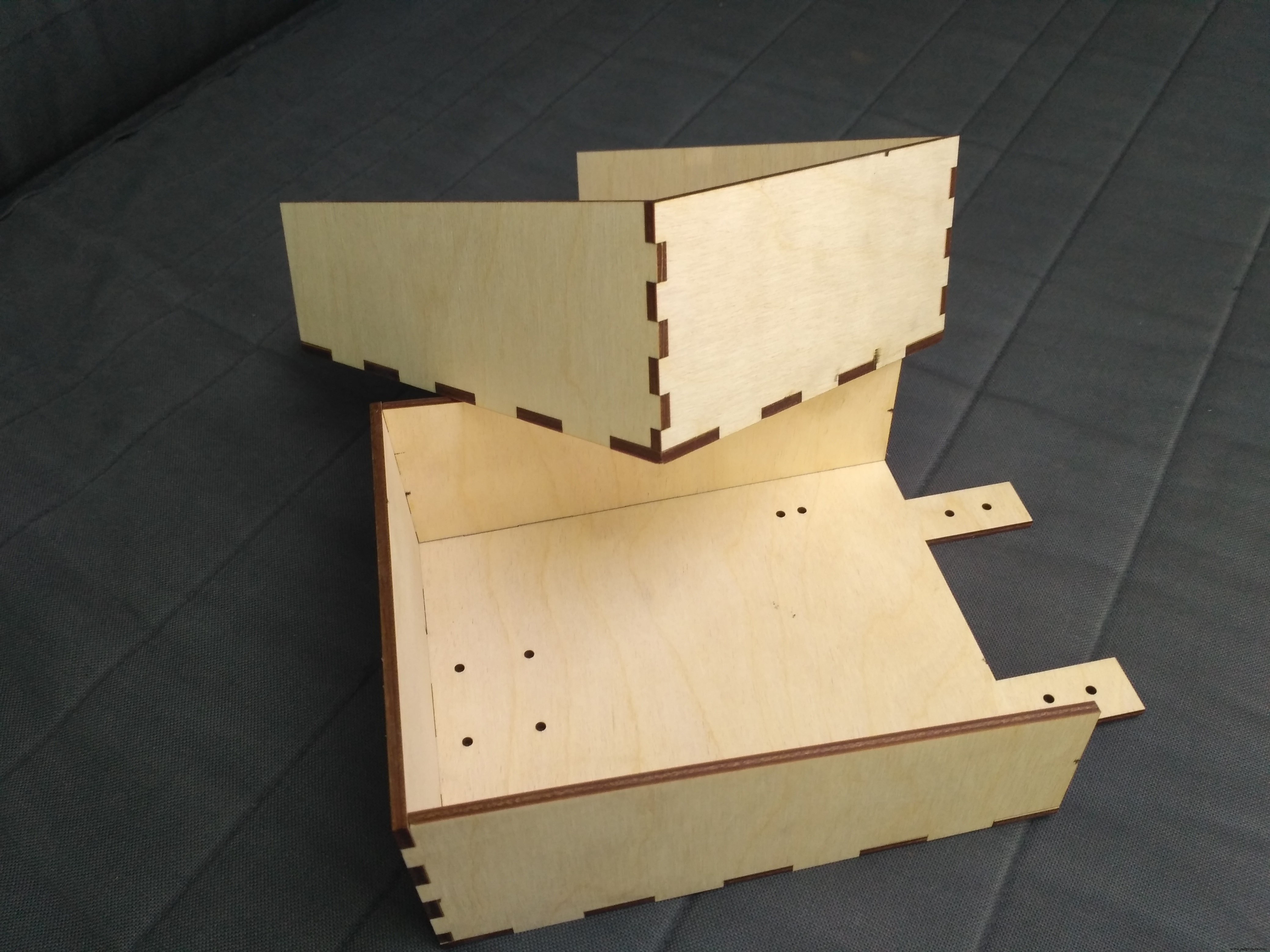
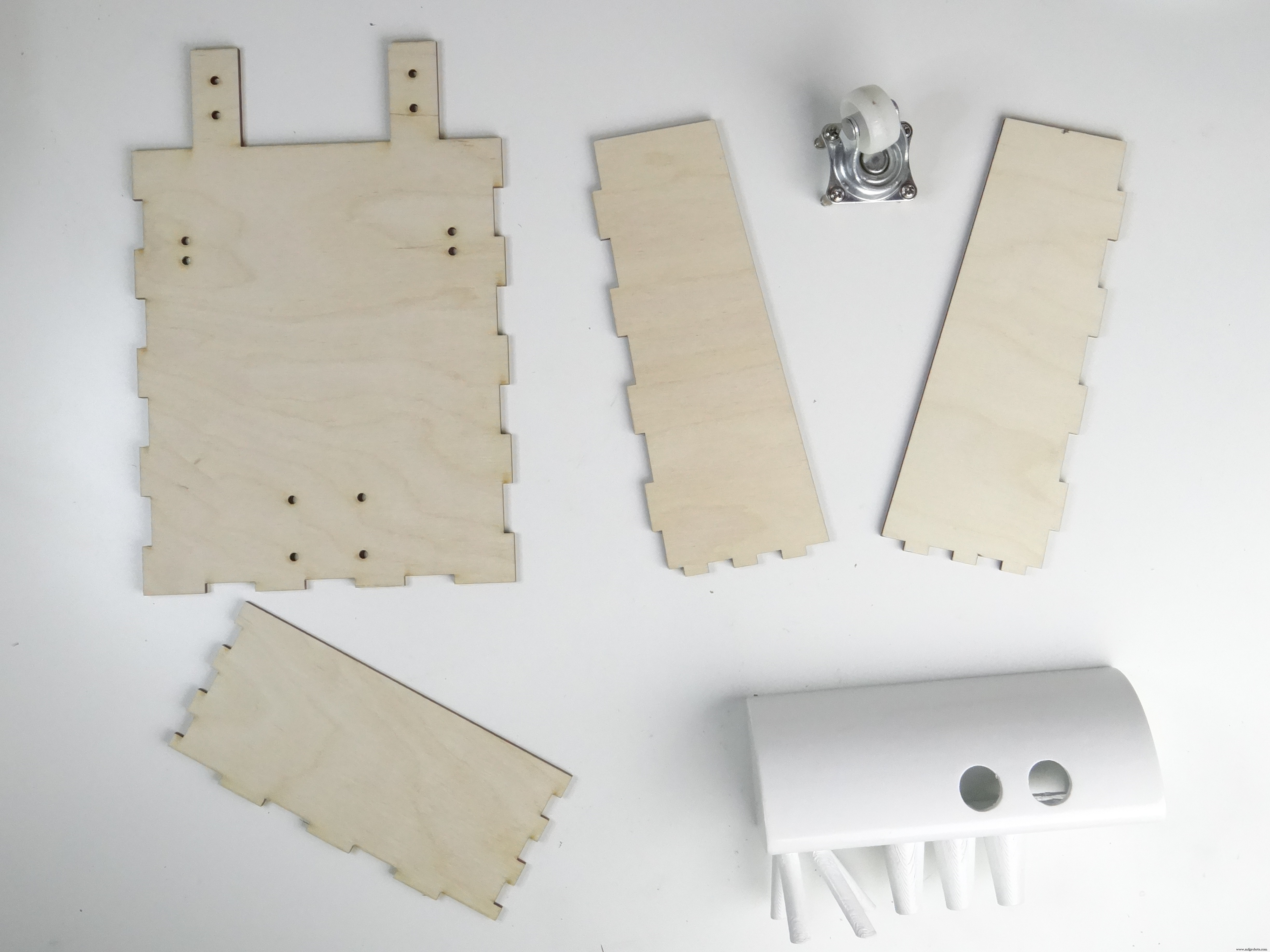
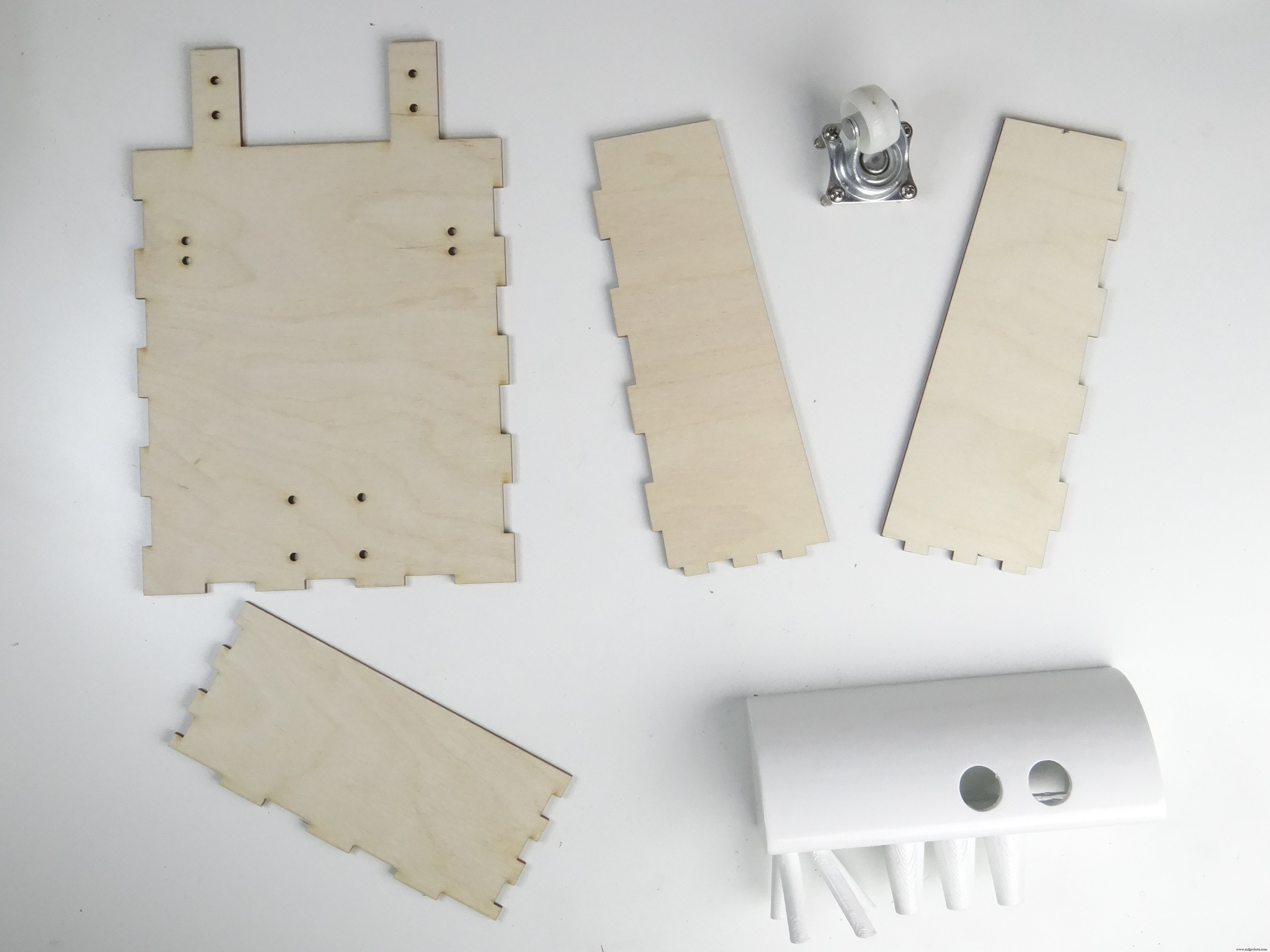
这是准备组装的激光切割零件和3D打印零件。
Arduino、传感器、电机、PCB...
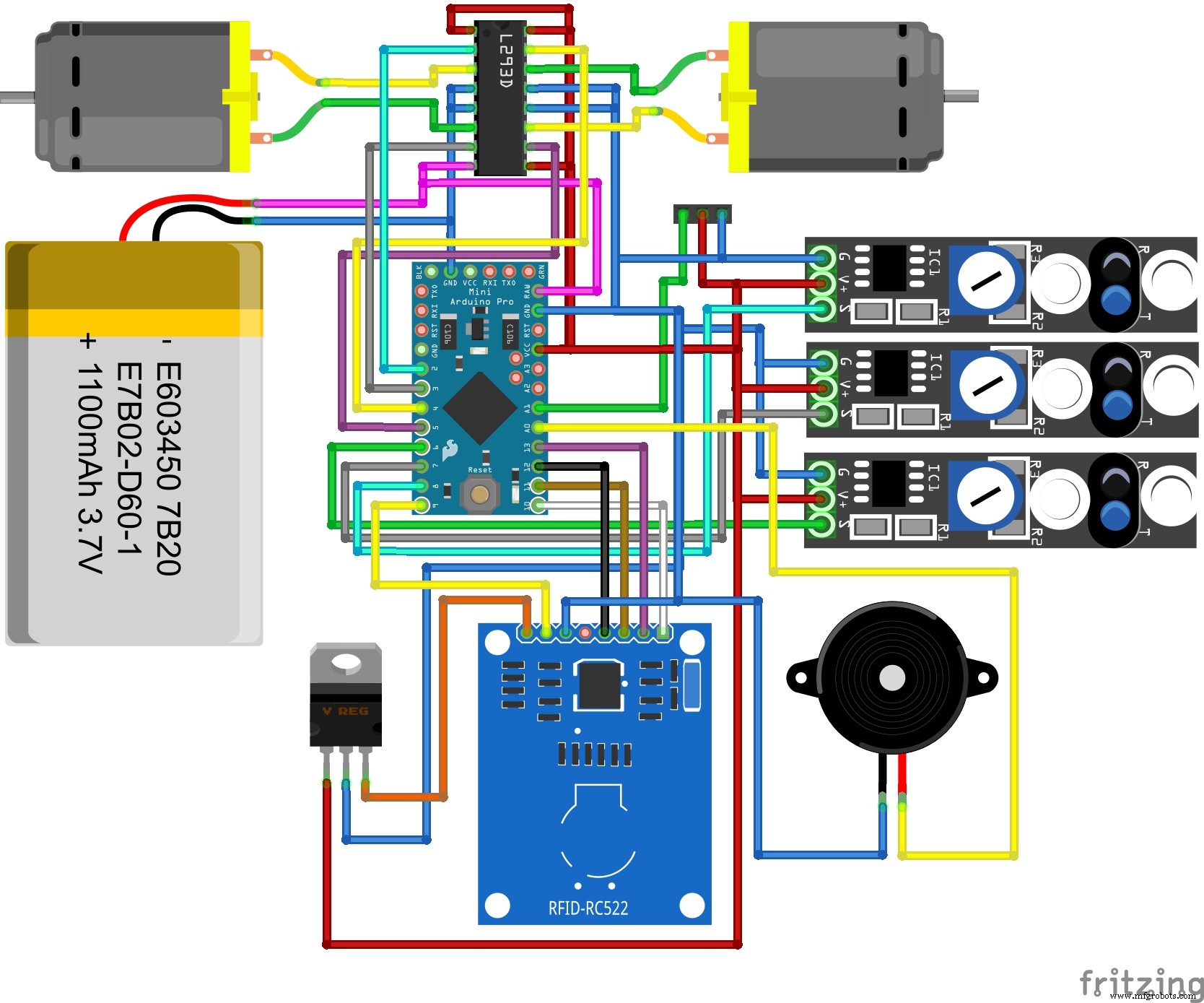
但这个项目当然不仅仅是关于设计。一切都由连接到我在 Fritzing 中设计的定制 PCB 的 Arduino pro mini 控制(PCB 布局和设计文件可以在附件中找到)。为了使其在没有人工输入的情况下自行工作,还有线路传感器和 RFID 模块来检测放置在线路旁边的标签。控制廉价和流行的齿轮电机的H桥是L293D,小巧易用。我还决定在电路中添加一个蜂鸣器,以便在检测到某些 RFID 标签时机器人可以发出哔哔声。一切都由 2 芯 LiPo 电池供电(标称电压为 7、4V)。因为 RFID 模块必须由 3、3V 供电,所以我必须在 PCB 上添加一个稳压器,以便为模块提供适当的电压。还有一个超声波传感器可以检测障碍物,正如他们所说,安全第一!有一个问题,就微控制器而言,使用 HC-SR04 读取距离需要相当多的时间,所以我设计了另一个项目(更多信息在这里),它可以轻松快速地使用该传感器检测障碍物。这不是必需的,但肯定会让事情变得容易得多。
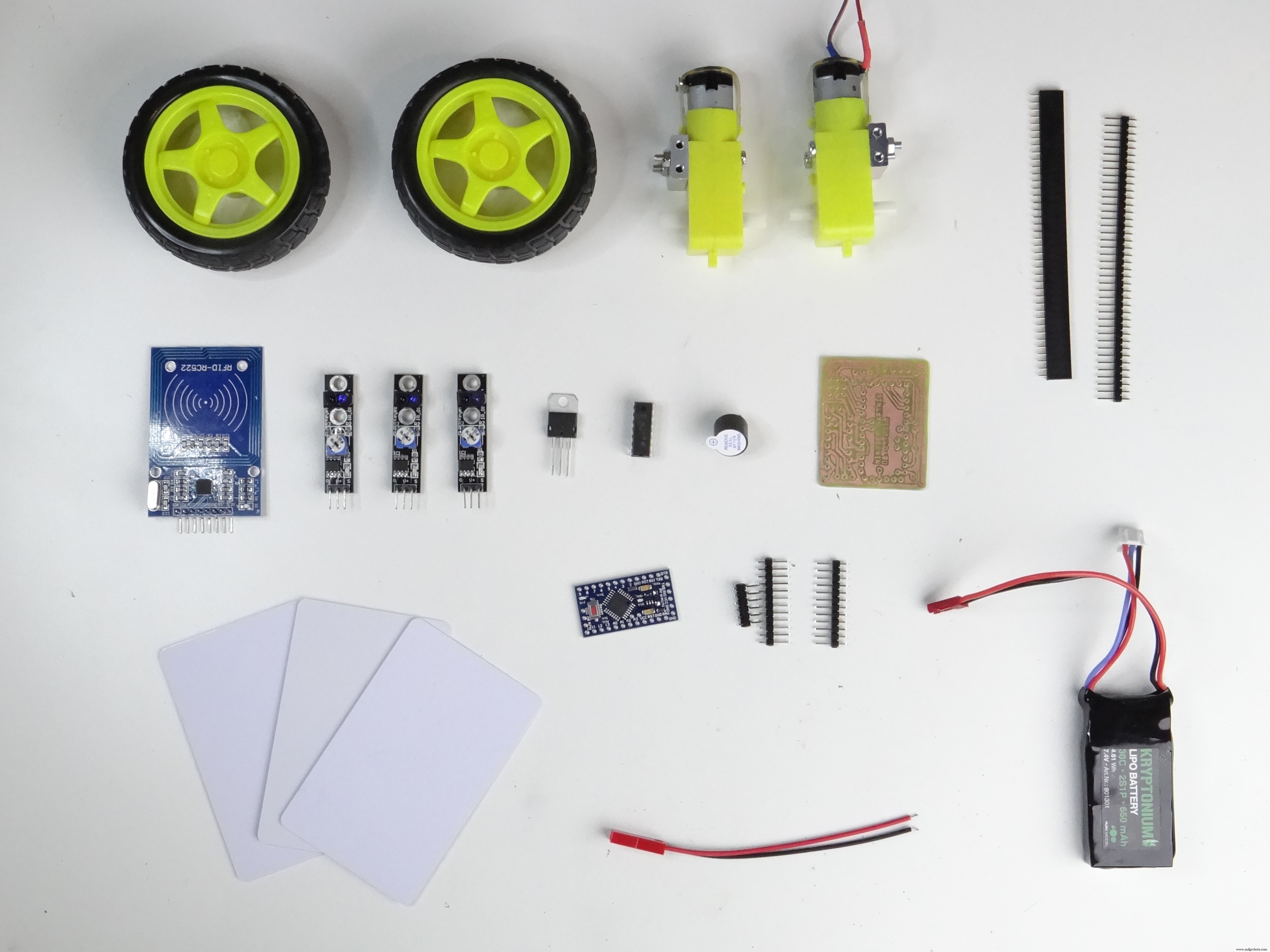
要构建 PCB,您需要一些工具和组件(Arduino、L293D、一些分离接头、电池连接器、蜂鸣器、3、3V 电压调节器)。你可以在这里阅读更多关于如何在家制作PCB以及你需要什么样的工具
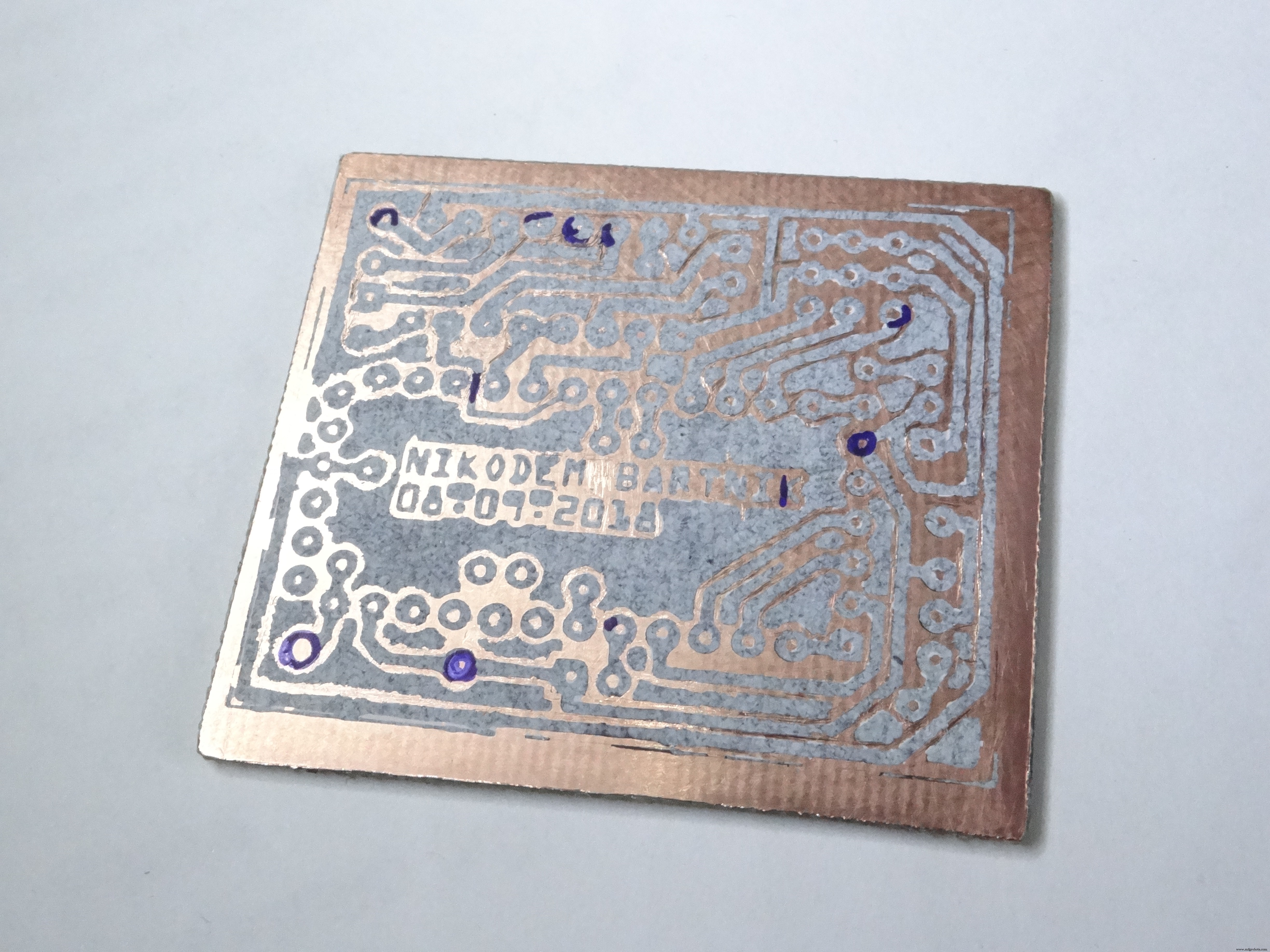
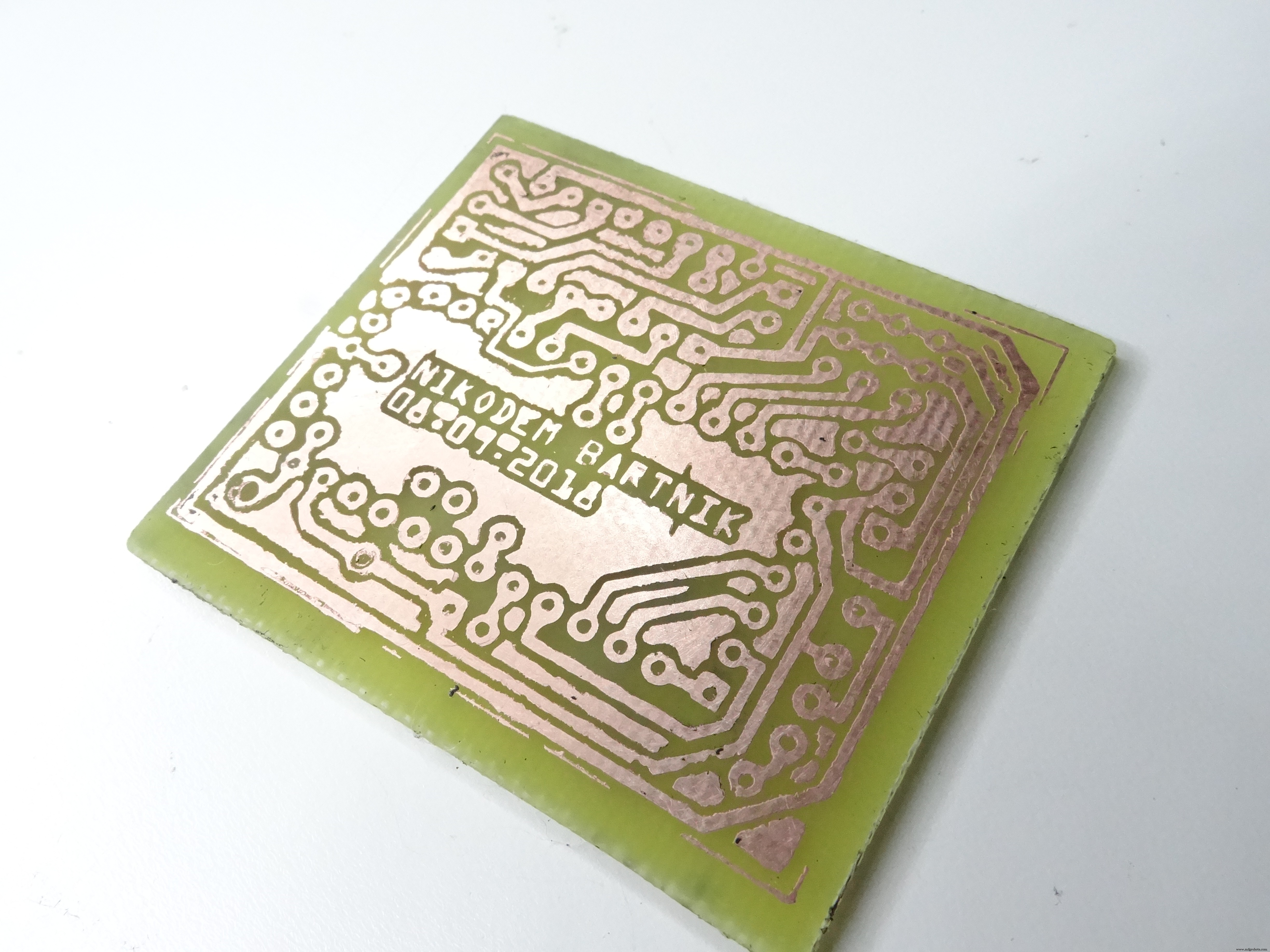
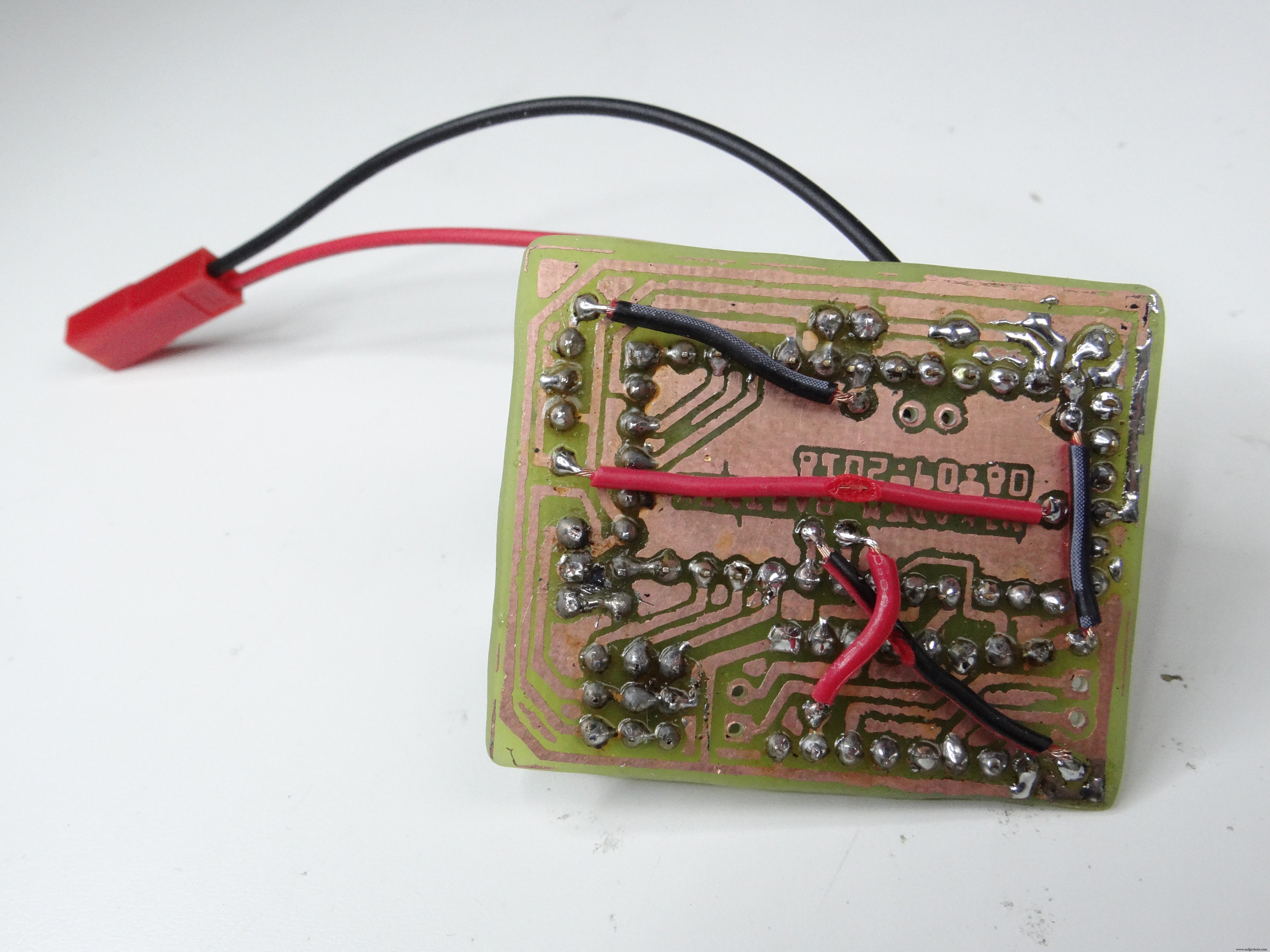
一开始,我想在 CNC 铣床上铣削我的 PCB,但我决定使用一种我熟悉的方法,称为墨粉转移。在上面你可以看到碳粉转移到铜板上。然后我蚀刻了我的 PCB 并清洁墨粉。您还必须在其中钻孔才能将 THC(通孔组件)放入其中。
对于 DIY PCB 而言,焊接非常容易,通常情况下,焊接要困难得多,因为上面没有阻焊膜*。
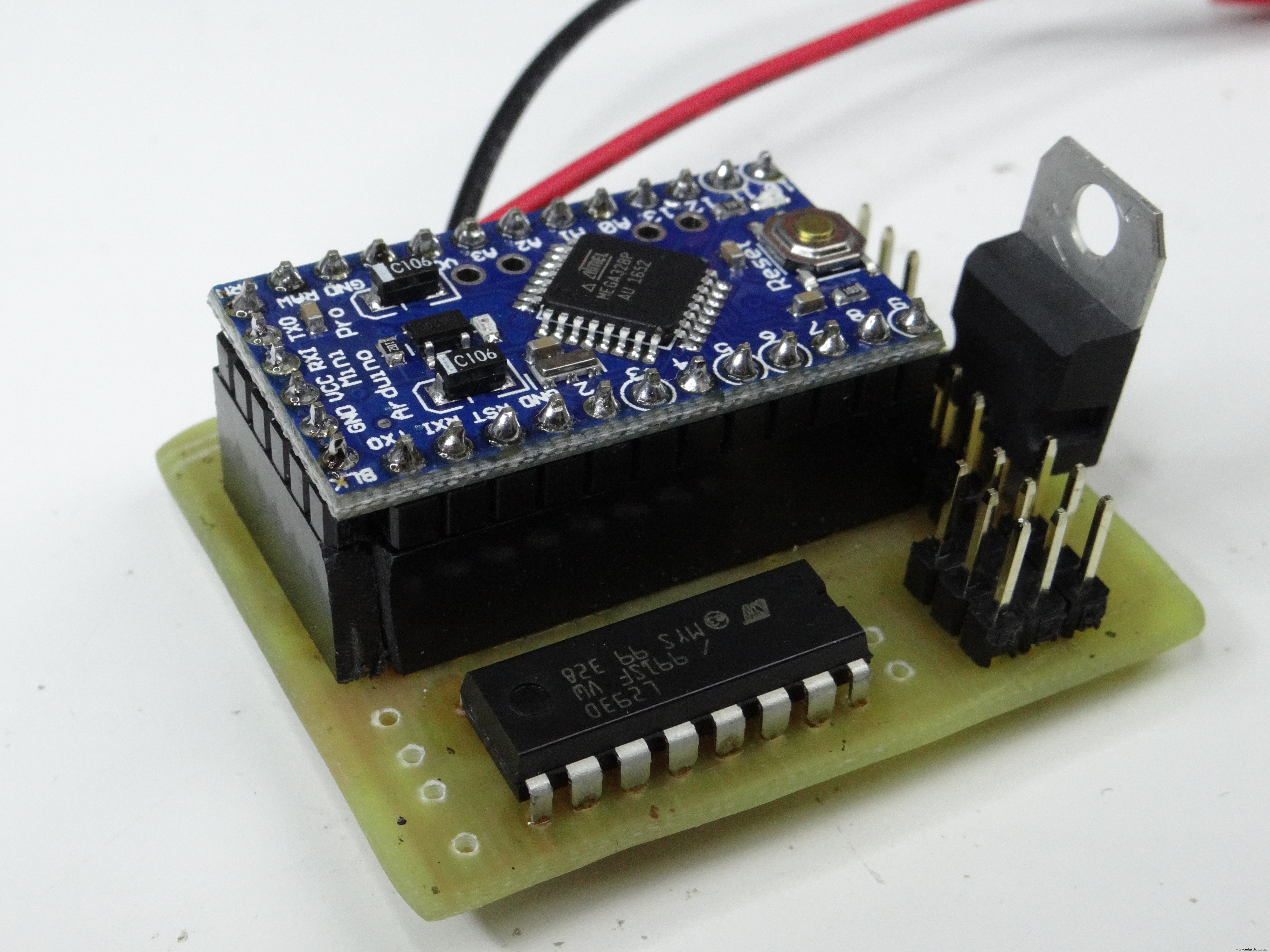
PCB 底部有 5 根跳线(在 Fritzing 的 PCB 视图中,它们被标记为蓝色电缆),我真的不喜欢使用跳线,但是对于更复杂的电路和单层 PCB,无法避免它们.
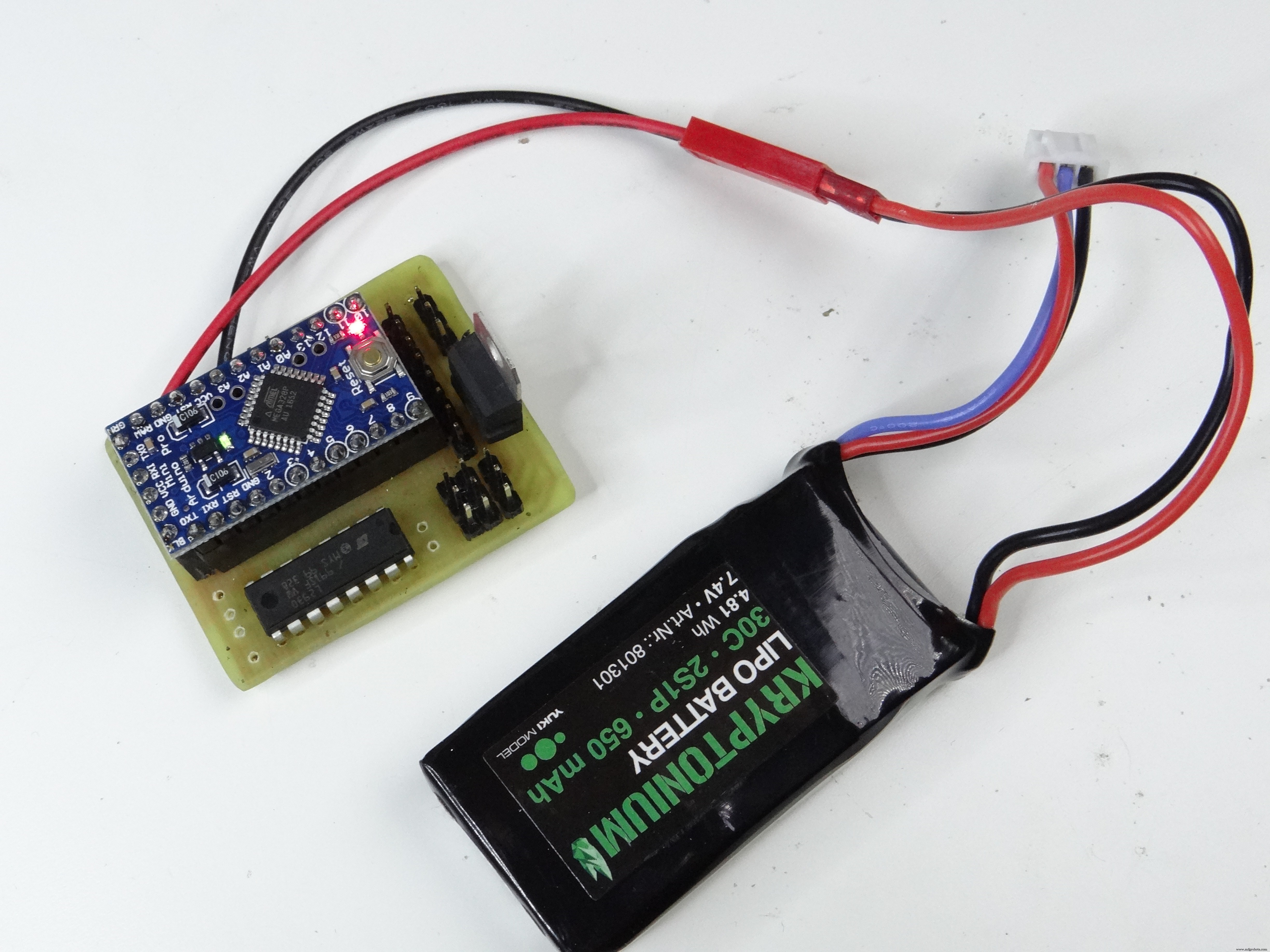
正如我所说的为这个机器人供电,我将使用 2 芯 LiPo 电池,您可以使用任何其他具有相似电压的电池,您不必使用特定容量的电池(容量越大,您的机器人在一个单次充电)。我还在 PCB 上焊接了一个插座,以便我可以轻松地将电池连接到它。

当所有东西都焊接好后,就可以通过将电池连接到它来测试它是否工作。 Arduino LED 应该亮起并且应该没有烟雾 :)
如果一切正常,我们可以对 PCB 进行最后的焊接工作,我们需要焊接电缆,稍后将其焊接到电机上。最好让它们比你需要的长一点,然后再剪,你不希望它们太短。
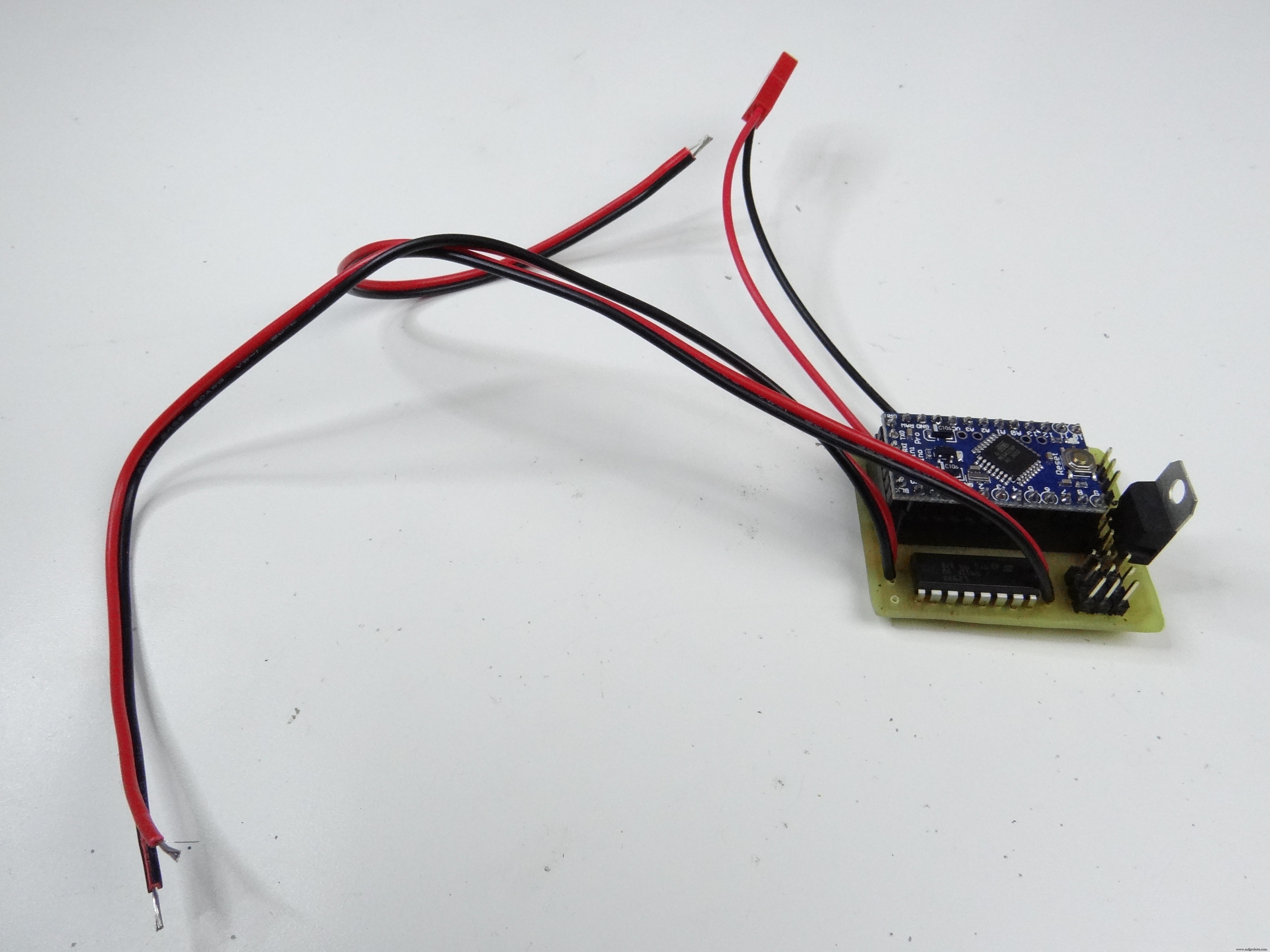
印刷电路板准备好了!如果您没有制作PCB的经验,请尝试做一个,这并不难。如果您更喜欢用电缆或原型板连接它,请随意这样做,但可能很难将其安装到机器人的前部。使用 PCB,您可以轻松做到这一点!我们仍然需要将所有传感器连接到 PCB,但首先我们将组装底盘并将所有传感器连接到它。
组装
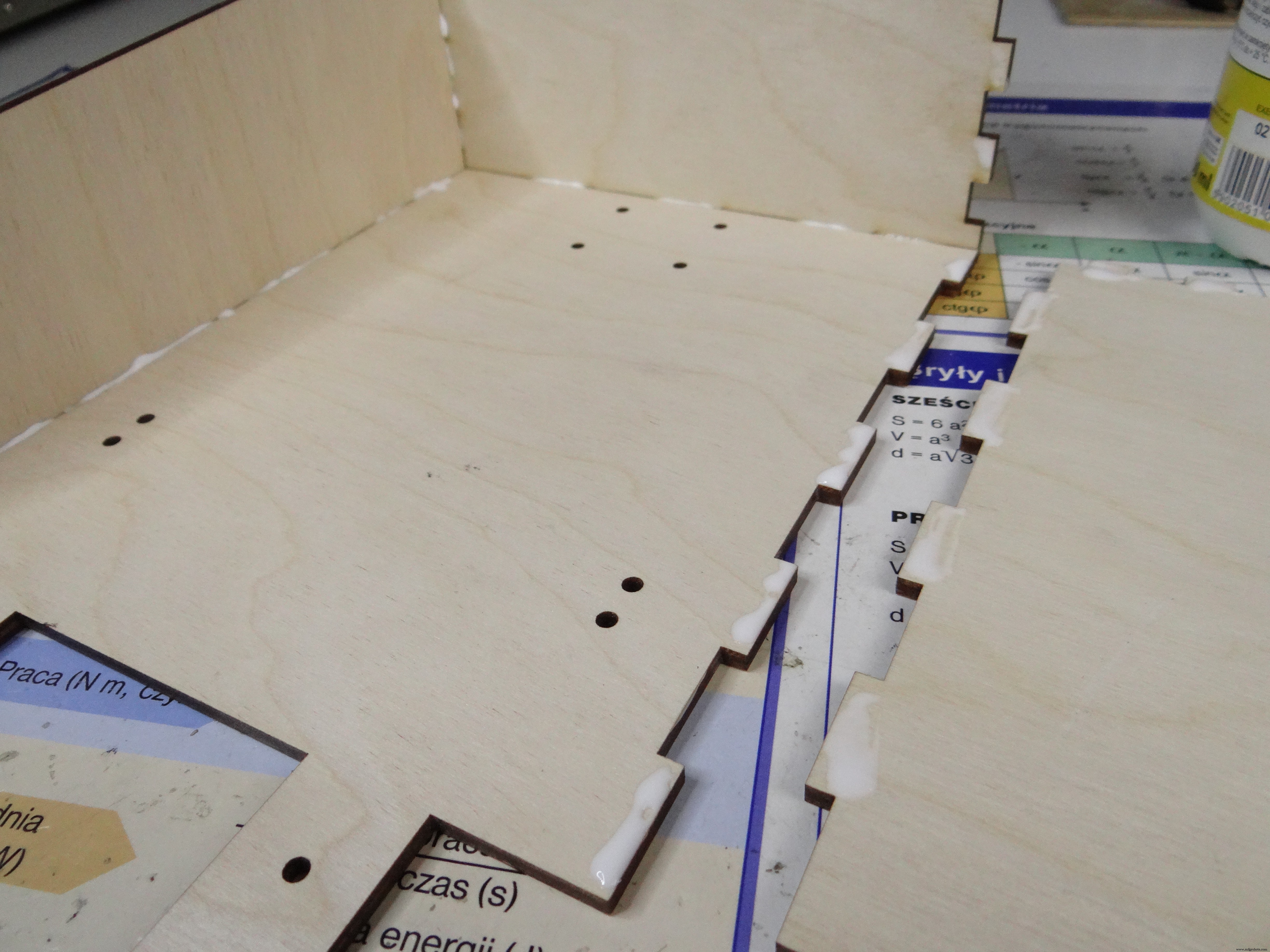
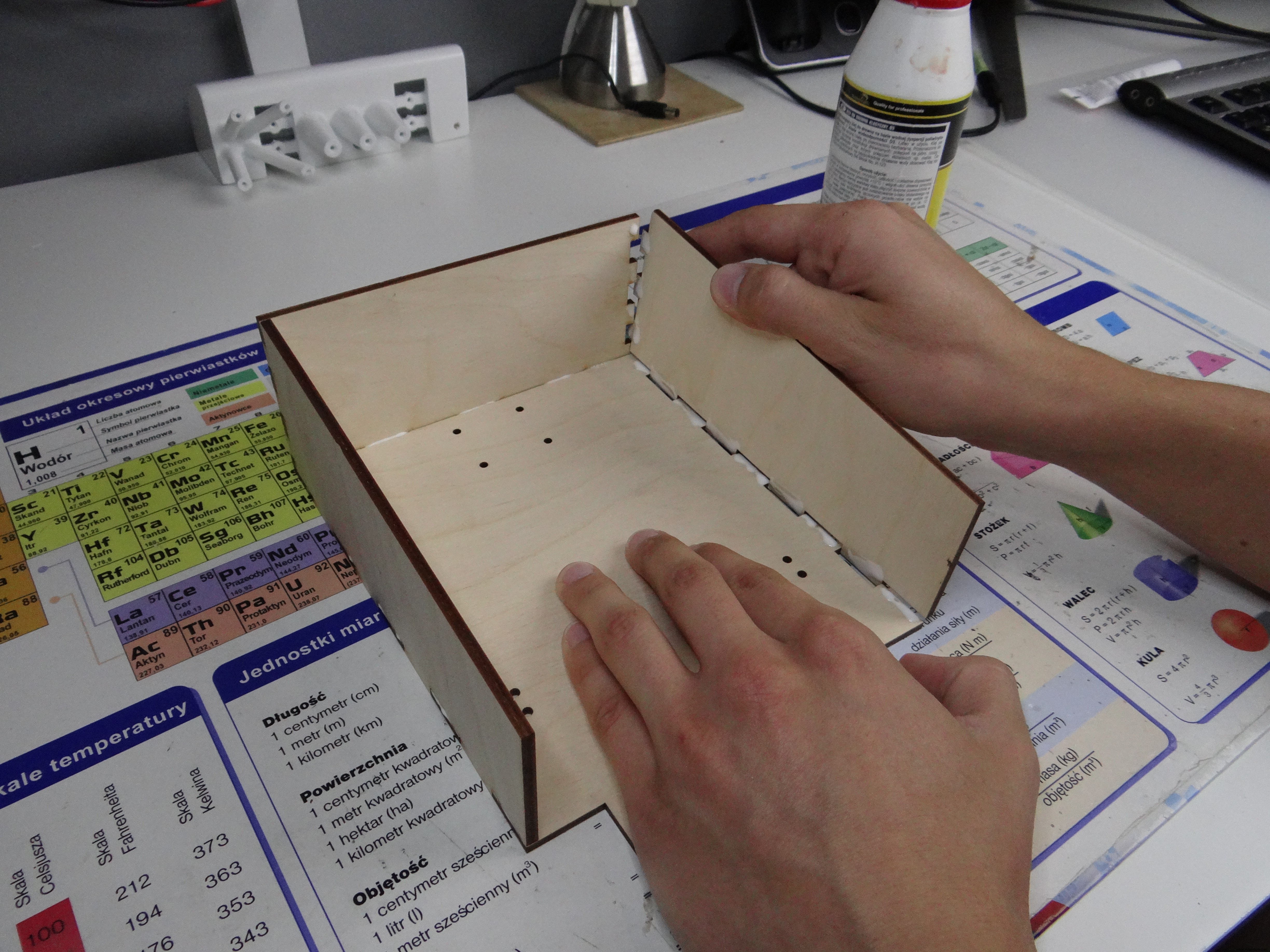
激光切割零件的手指关节可以完美地结合在一起,但要使其真正坚固耐用,我们必须使用胶水。那是胶合板,所以任何木胶都可以完成这项工作。确保不要使用过多的胶水,并在有任何泄漏的情况下进行清洁。它应该干燥几个小时,以便我们可以休息一下。确保所有部件都正确放置,一旦胶干就无法改变。

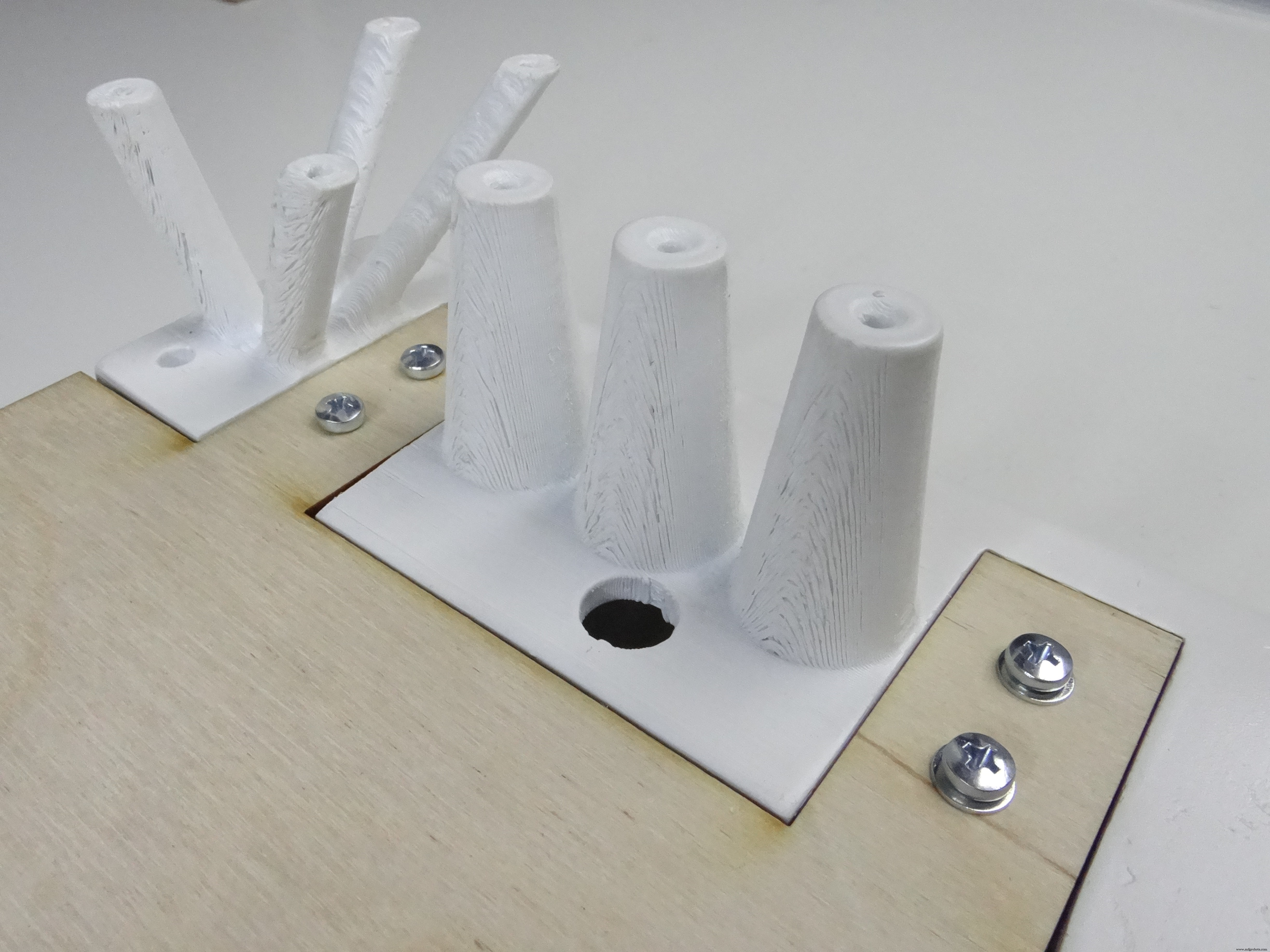
几个小时后,我们可以继续组装我们的机器人。是时候将 3D 打印的前部连接到胶合板上了。我们不会为此使用胶水,正如他们在我 CIT 实习期间教我的那样:使用胶水是不专业的,算了(但我希望它对木头没问题)。我们将使用从机器人底部放置的螺钉,确保它们很短(比如 6 毫米长),这样它们就不会在 3D 打印部件内部的电路上造成任何短路。这种将前部固定在胶合板上的好处是你不能从顶部看到它,你必须在机器人下面看,这样会好很多:) 我建议你使用垫圈来保护胶合板变形。

到目前为止它应该是这样的,如此干净和完美!

现在我们将把电机和后轮安装到底盘上。为此,您将需要一些 M3 螺钉。我还在这里使用了一些垫圈来保护胶合板。

是时候回到传感器了,翻转你的机器人,抓住一些 M3 螺丝和螺丝刀。
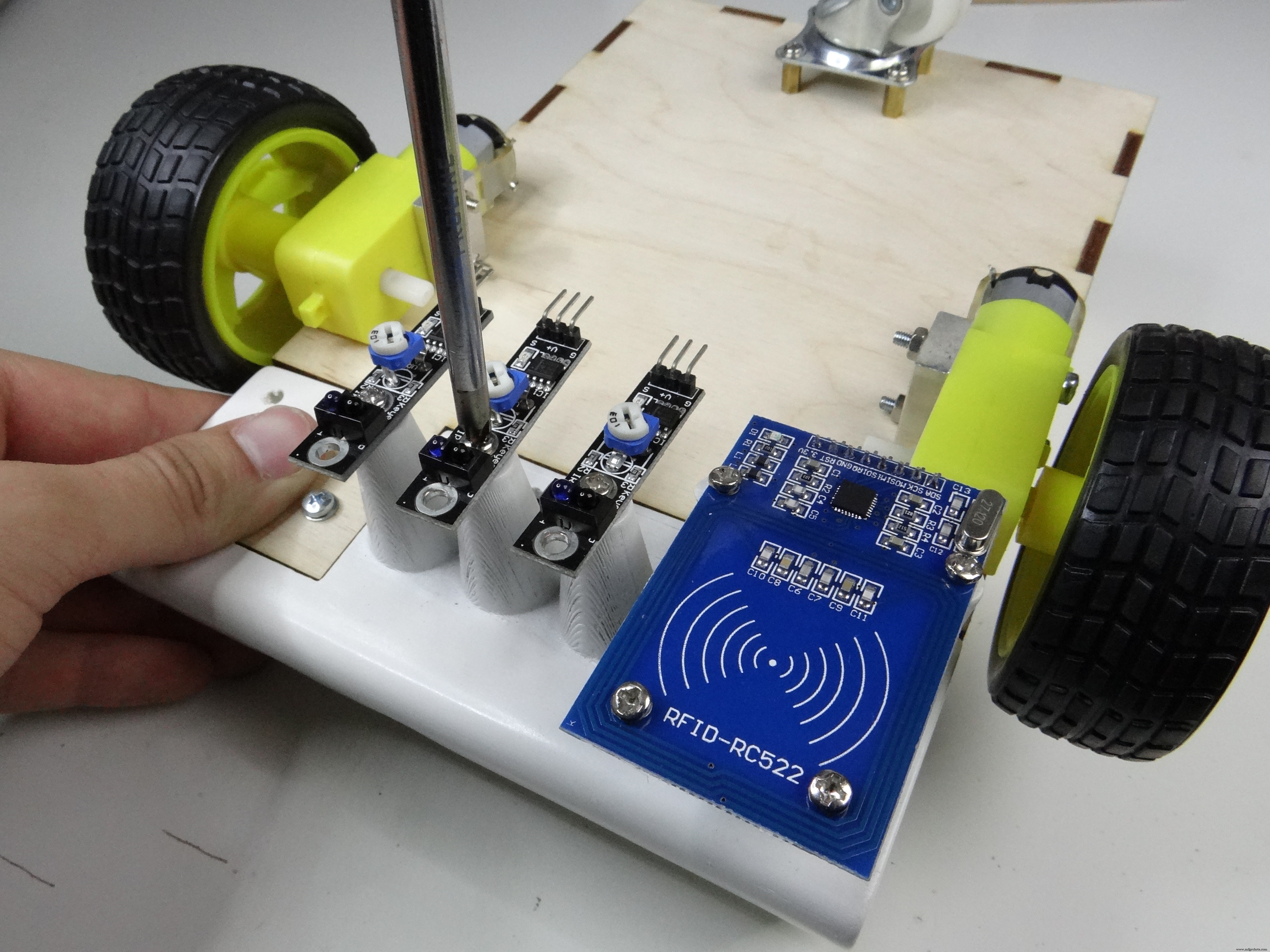
组装完成!一点都不难,纯粹的快乐。我们现在可以看到机器人的形状,所有传感器和电机都在它的位置。我们真的快要完成了,但在最终测试之前,我们必须将所有传感器连接到 PCB。
连接
这一步可能需要一些时间,将所有电缆穿过 3D 打印前部的狭小空间并不难,但非常棘手。我发现最好的方法是将电缆连接到所有传感器和模块,将它们穿过前部的孔,然后连接到 PCB。
我想把这个项目的所有电子设备放在 3D 打印部件的左侧,不幸的是,结果证明电池比宣传的要大一点,我不得不在左侧放一块电池,然后把电子设备放在上面右侧。但这没什么大不了的,一切都完美地融入其中。
还要记得安装超声波传感器。
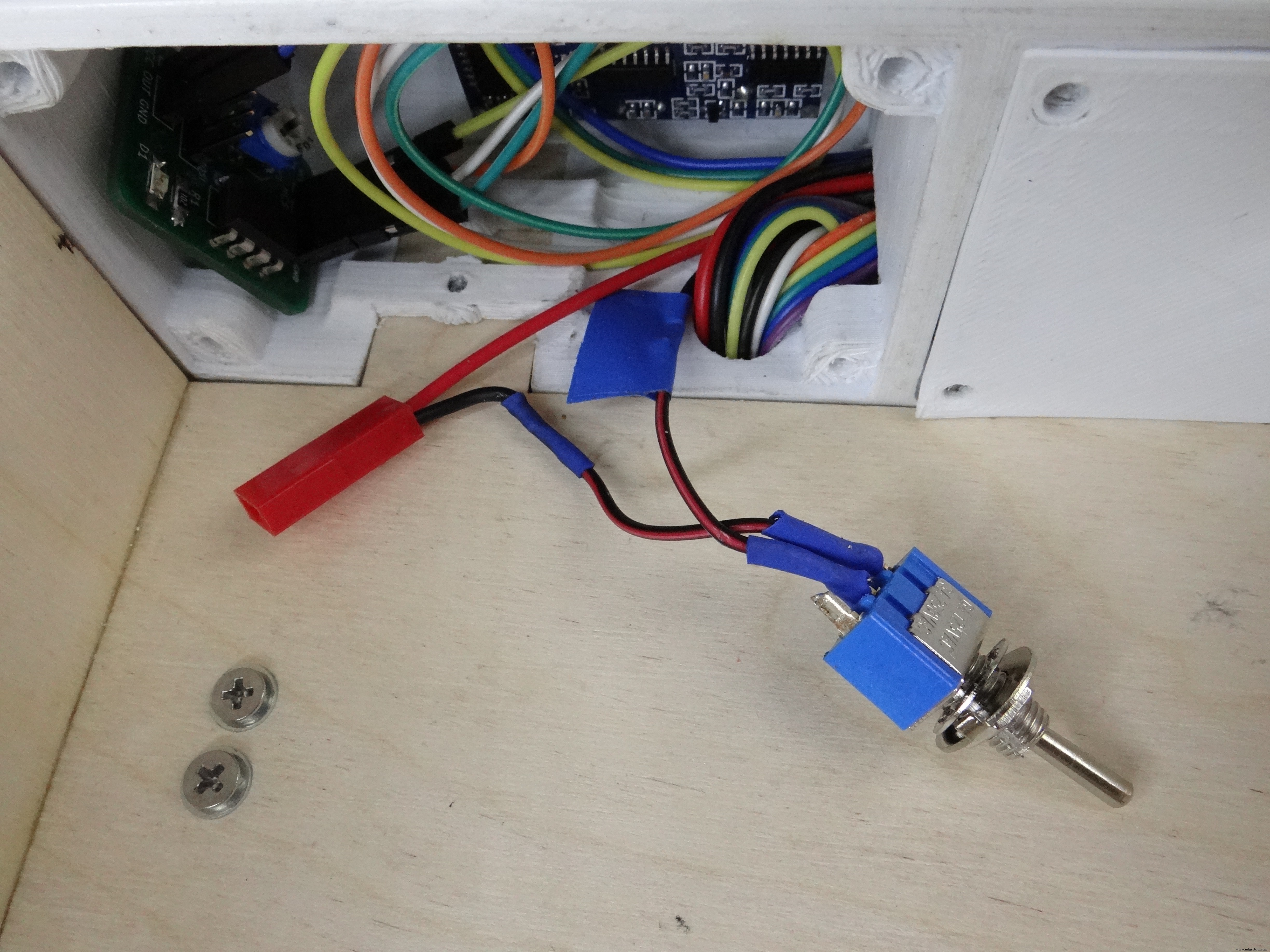
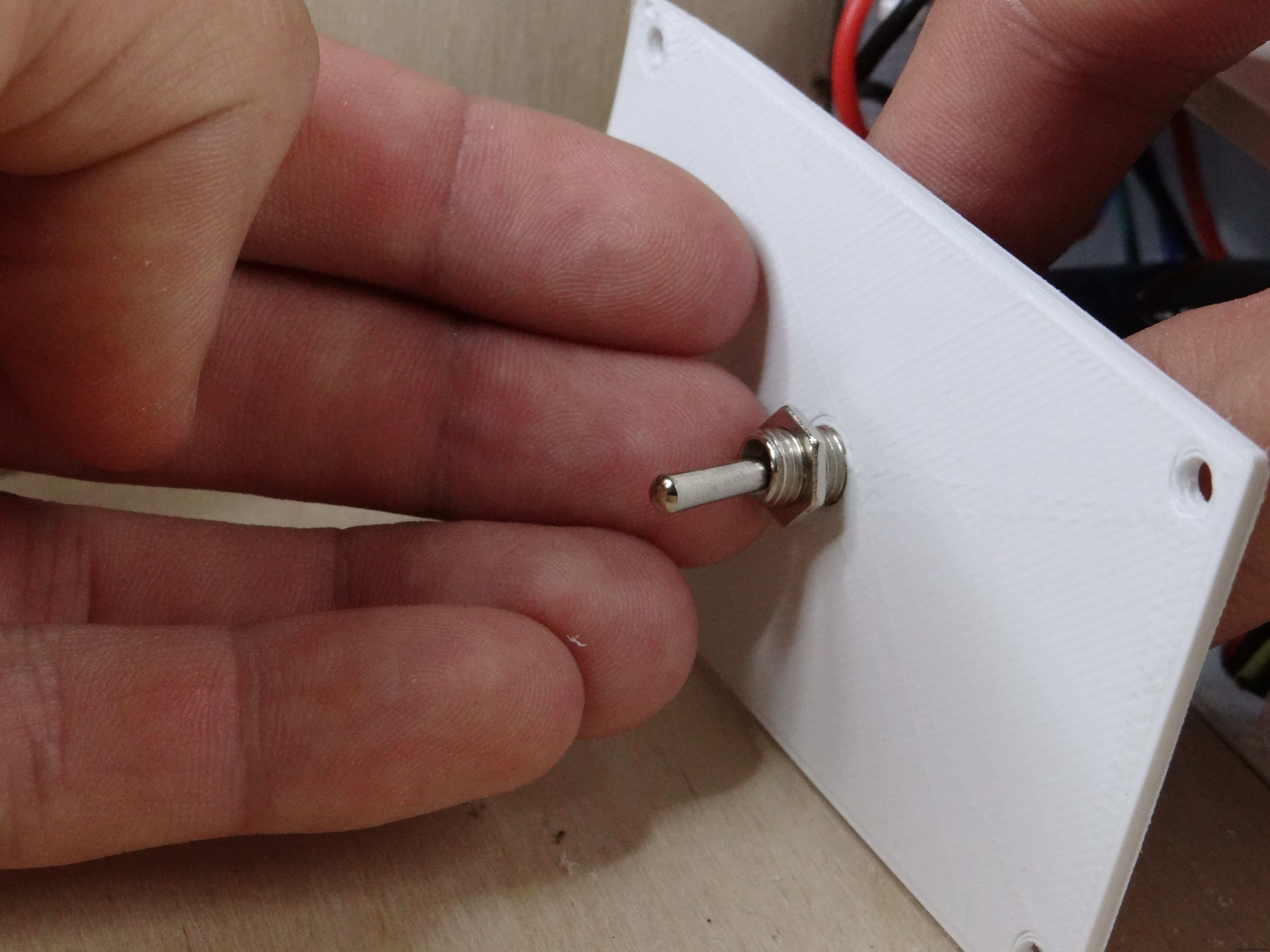
为了轻松打开和关闭机器人,我在电池连接器上添加了一个开关,就像这样。后面板上还有一个孔,可以在里面放一个开关。
代码
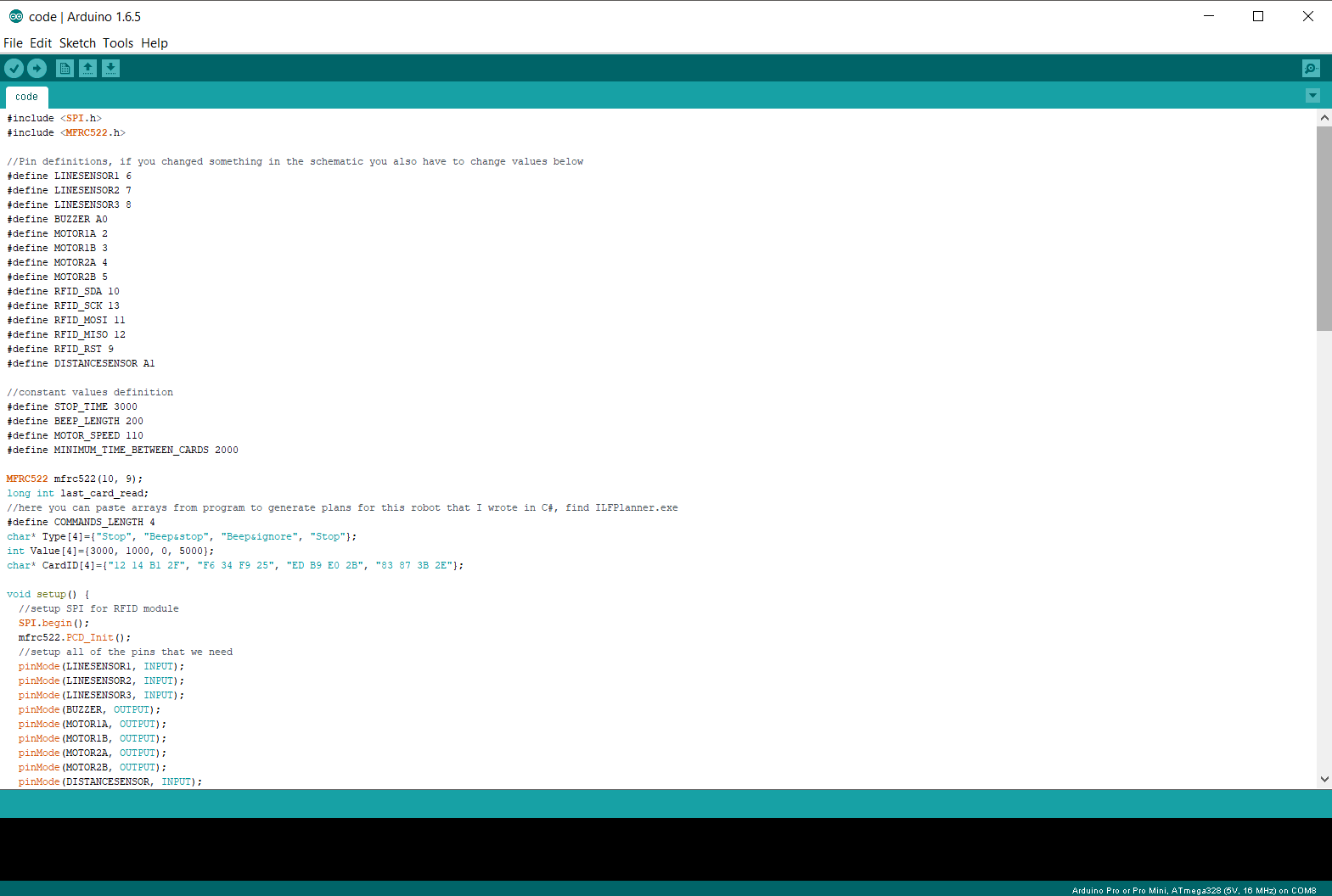
在我们关闭前部的背面之前,我们必须将代码上传到 Arduino pro mini。我们需要从 PCB 中取出 Arduino,并使用 USB-UART 转换器将其连接到计算机。 Arduino 的代码可以在下面找到。有关代码的所有内容都在评论和视频中进行了解释。代码也可以在网页编辑器中找到
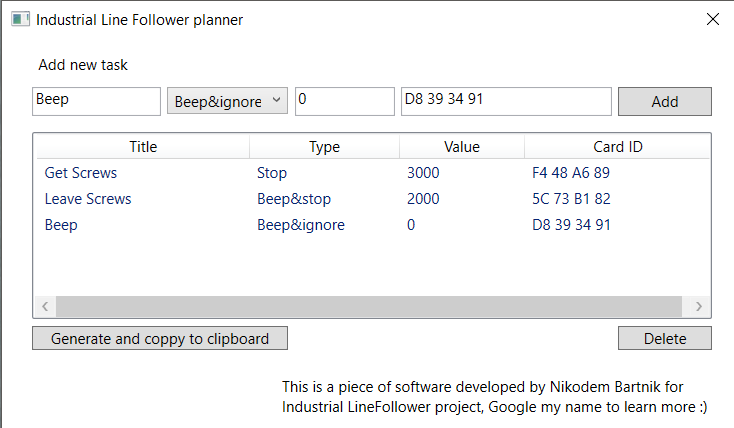
还有一个我用C#写的专门为这个机器人生成任务的程序,叫做tasks planner(你可以在下面找到.exe文件)。它让您可以轻松地为机器人生成任务,将它们复制并粘贴到 Arduino IDE,然后再上传到 Arduino。要为机器人生成任务,您需要知道 RFID 卡的 ID,要获取它,您可以在此处构建一个简单的电路更多信息。
快完成了...

现在我们可以用两个襟翼关闭前部的背面并将它们拧紧。将所有组件安装在里面可能很棘手,尝试重新排列它们并将它们放在不同的位置以关闭襟翼。


要将其拧紧,您可以使用一些短的 M3 螺钉,并且那里不需要垫圈。这是我们必须做的最后一件事。我们的机器人终于准备好进行最后的测试了!我花了很多时间来构建它,我真的很高兴现在我可以看看它是否会像我预期的那样工作 :)

这是它的外观,所有组件都在原位,电子设备隐藏在前部,传感器安装在机器人上。唯一的缺点是电池充电可能很困难,因为您必须打开后盖才能将其取出。简单的解决方案是在 3D 部分打一个孔,然后通过这个孔伸出电池的平衡器电缆。

最后一个考试!
我不确定如何向您展示这个机器人是如何工作的,或者我应该说如何正确地做到这一点。这个项目的主要目的是建造一个廉价的开源机器人,它可以在装配线和工厂周围巧妙地运输东西,所以我建立了一条简单的装配线,并向我父亲和兄弟的儿子寻求帮助。我们的目标是将一件物品放入机器人中,在不同的工作站上从机器人那里抓取它,然后将已经贴有标签的物品放在上面,然后在最后一个工作站将带有标签的物品移至仓库。模仿流水线的简单任务,让您轻松测试它的工作原理。
我想在地板上贴上黑色胶带,但它对我的传感器来说反射性不够,所以我用了一些纸板。我们开始测试,你可以在视频中看到(你可以在这个项目的开头找到它)。

在这个项目中有很多事情可能会出错,但一切都很完美。它按照我的预期工作,每一步,从设计到组装的最初想法都进行得很顺利,而且非常好。当我说有很多事情可能会出错时,我是认真的。我在 3D 打印、编程和 Arduino 方面有很多经验,但那是我第一次在纸上绘制我的项目,这是个好主意,我肯定会更频繁地这样做,我以前从未设计过任何用于激光切割的东西,即使我有 C# 程序员的证书,我也不是它的高手。我设法将所有这些连接在一起,创造了一个如此酷的机器人 :) 我希望你喜欢我的项目,如果喜欢,请不要忘记在评论中说几句话,我真的很好奇你对它的看法。如果您有任何问题随时问!感谢阅读。
快乐制作!
代码
- 工业线跟随器 Arduino 代码
- 任务规划师
- 任务规划器.exe
Industrial Line Follower Arduino 代码Arduino
这是 Nikodem Bartnik* http://NikodemBartnik.pl* https://www.youtube.com/user/nikodembartnik**/#include任务规划器C#
用我的 C# 程序 ZIP 为机器人生成任务,你也可以在下面找到 .exe。没有预览(仅下载)。
Task planner.exeC#
您只需在 Windows 机器上运行它,无需安装无预览(仅限下载)。
定制零件和外壳
底盘的前部,装有所有传感器和电子设备。用白色 PLA 印刷,然后打磨并涂上几次以使其有光泽。打印大约需要 8 小时,你必须使用支撑你需要这个来关闭前部的左侧你需要这个来关闭前部的左侧 DXF 文件用于激光切割 4 毫米材料(胶合板,plexi) plateback_CLMFY08IX0.dxfDXF 文件,用于在 4 毫米材料(胶合板、plexi)上进行激光切割 platebottom_YXrDbx6Zxr.dxfDXF 文件用于激光切割 4 毫米材料(胶合板、树脂) plateleft_SWSXq4pbU1.dxfDXF 文件,用于在 4 毫米材料(胶合板、plexi)上进行激光切割 plateright_mRA9hd7Kp8.dxfFusion360 文件,以防您想编辑任何内容 Industrial_line_follower_design_vX9sr32Rar.f3d示意图
Fritzing 文件,以防您想编辑某些内容 schema_QjiJP4TLOo.fzzSchematic 包含此项目的所有连接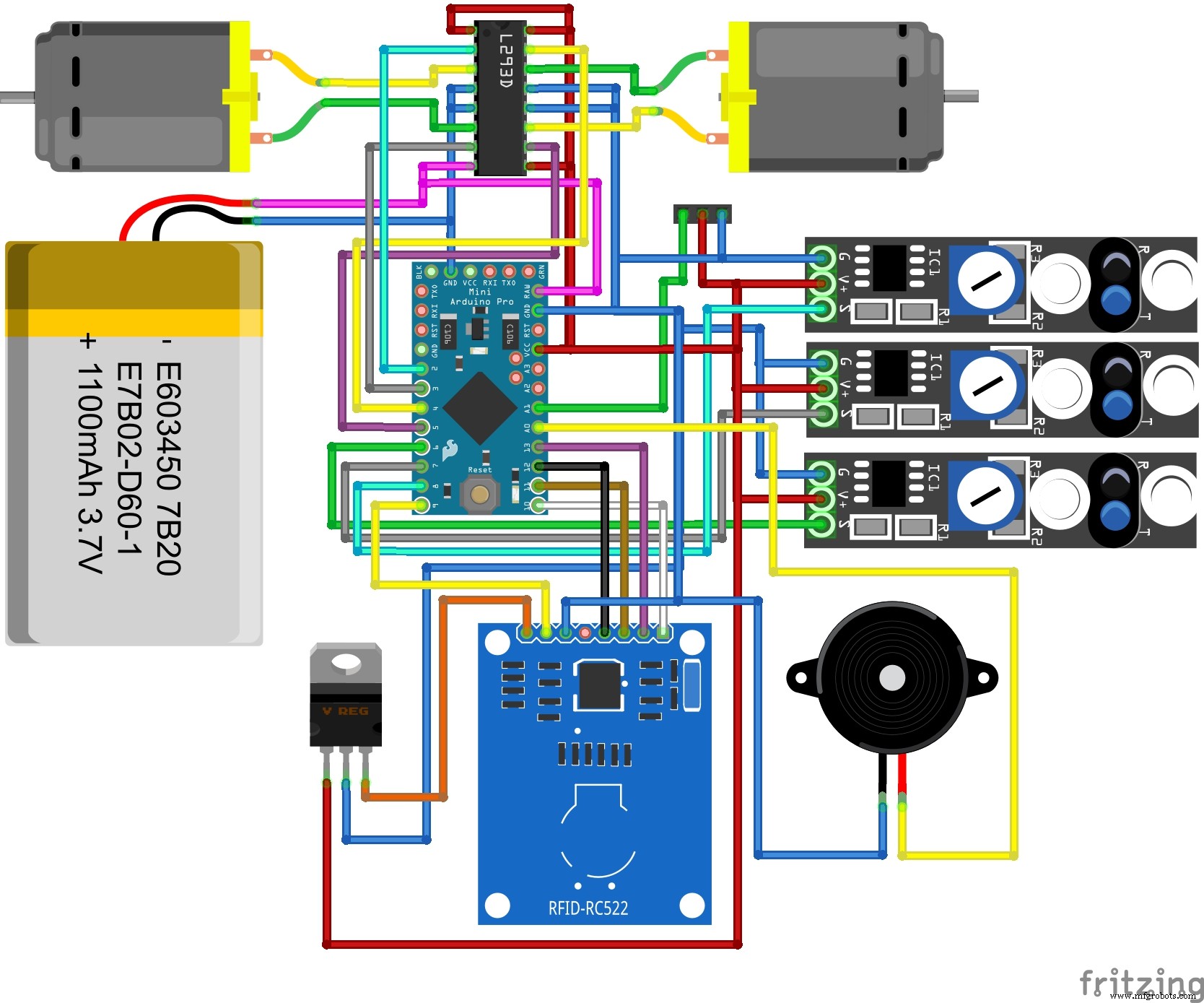 这是为该项目制作PCB所需的PDF文件,它是单面的,所以有是没有顶层
这是为该项目制作PCB所需的PDF文件,它是单面的,所以有是没有顶层制造工艺