

Servoradar
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
关于这个项目
正如我们所知,为了从太空探测卫星、天体、小行星信号等,我们需要有一台用于多种用途的雷达。美国宇航局将许多雷达用于我们的工厂目的和太空目的。实际上,我的项目是一个雷达,当物体距离雷达 10 厘米时,它会在串行监视器上显示“检测到的物体”。这是利用以声波传播的超声波的基本原理工作的,因此我们需要一个超声波传感器 .

接下来进行编程和执行代码以使其工作,我们将需要 Arduino (任何板,但尝试使用 UNO);在我看来,我认为 arduino 非常适合该项目,因为它具有出色的数据存储和显示类型。在听到显示这个词的同时,我们还需要使用串行监视器。 现在转动传感器以传播它的波并收集回来以计算我们需要伺服的距离。 现在对于硬件之间的通信,我们需要跳线和面包板。
现在让我们看看它是如何工作的,超声波传感器发送波并产生每分钟 8 个周期的超声波脉冲,然后使用引脚接收它,然后它将数据提供给计算距离的板,然后将其上传到串行监视器中。伺服保持从 0 度旋转到 180 度,arduino 不断计算它移动的角度并将其上传到串行监视器上。当超声波传感器检测到距离小于 10 厘米时,arduino 就会知道一个物体并在串行监视器上打印“检测到的物体”。
使用这个基础我的 arduino 伺服雷达工作。

如果你喜欢我的雷达,那么请尊重我的项目,如果雷达不能正常工作或者你认为有一些错误,请在评论中告诉我,我会清除错误。
代码
- 伺服雷达代码
伺服雷达代码Arduino
该图可能与代码略有不同,因此请尝试遵循代码#includeServo myservo;int Ang =0;long duration;int distance;const int trigpin =8;const int echopin =11 ;无效设置(){ Serial.begin(9600); myservo.attach(3); pinMode(触发,输出); pinMode(echopin, INPUT);}void loop() { for (Ang =0; Ang <=180; Ang +=1) { myservo.write(Ang);延迟(15); } for (Ang =180; Ang>=0; Ang -=1) { myservo.write(Ang);延迟(200);数字写入(触发,低);延迟微秒(2);数字写入(触发,高);延迟微秒(15);数字写入(触发,低);持续时间 =脉冲输入(回声,高);距离 =持续时间 * 0.034 / 2; Serial.println("距离"); Serial.println(距离); Serial.println("角度"); Serial.println(Ang); if (distance <=10) Serial.println("检测到物体"); }}
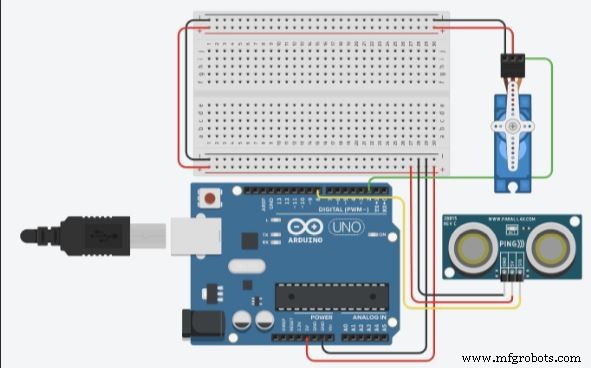
示意图
连接以下传感器 Arduino
VCC - 5V
触发器 - 8
回声 - 11
地-地
伺服阿杜诺
正极引脚 - 5V
负极引脚 - 地
引脚 - 3
请按照以上说明
制造工艺