

Zen Garden CNC 端台
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 |
应用和在线服务
 |
|
关于这个项目
我是马克。晚上,我和家人一起坐在电视机前,带着鼹鼠皮,或者我的另一个项目记事本和草图想法。我的许多谈话都是“如果 _______ 会不会很酷”的种类。我的许多想法从未离开我的项目页面。这个做到了。我认为这很棒。这是一个封闭的禅宗花园,建在茶几上。该运动的灵感来自 CNC 或 3D 打印机,实际上开始使用斜坡 1.4(3D 打印机 Arduino 扩展板),直到我想到了一种更简单的方法来构建它。
我希望最终产品代表和平。我想给我的客厅带来一些禅意。我想我做到了。
我建造的许多东西并不漂亮,只是它的样子。在建造这个的过程中,我从来没有向我的妻子解释我到底在建造什么。只是它会是足够好看的家具,需要它在我们的房子里。把这个放在上下文中,你应该知道我和我的妻子分享了一切。她是我最好的朋友。但在这个项目中,我只是向她保证,最终的结果将是她在客厅里拥有的东西。她知道那是茶几,但仅此而已。所以我加倍努力让这张茶几对她来说真的很漂亮。
我已经建造了 3D 打印机。我也做过一些简单的家具(书架、长凳等),但我从来没有建造过任何将科技融入家具的东西。所以我真的认为这会是一个有趣的项目。
大约六个月前,我对这张桌子有了初步的想法。 Tables and Desks 比赛(以及所有这些漂亮的黑色和黄色工具作为奖品)激励我开始这个项目。
第 1 步:设计和构思
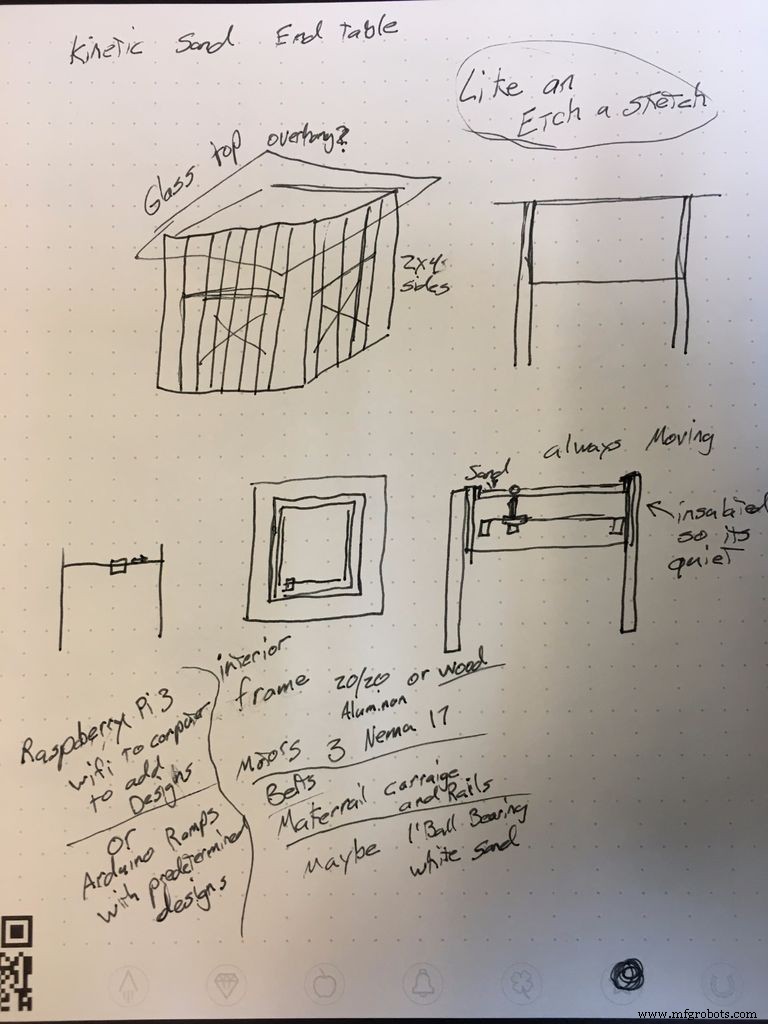
我想建一个茶几,可以单独放置或放在沙发旁边,也许上面有一盏灯。我希望它比任何东西都更“艺术”,将技术注入木材。我总是看到有木耙的岩石花园,我一直认为它们很安静。这就是我在这个建筑中想要的,和平的技术融合艺术。
为了实现这一点,我考虑使用类似于没有 z 轴的 3D 打印机的龙门架。通过这种方式,我可以通过某种介质(可能是沙子)使用磁铁驱动滚珠轴承。我也想过编程它来“打印”图片,或者自己设计。
我想我将使用带有 2 个步进电机驱动器和一些相当简单的代码的 Arduino。我没有在代码中编程设置空间,而是在两个轴的最小值和最大值上安装了一个终点挡块,因此 0,0 触发电机停止,以及 XXX,XXX 最大值触发电机停止。这将使编程更容易。
第 2 步:所需零件和材料


好的,这是我使用的部件的列表。这并不意味着你必须使用相同的部件,我只是想让你大致了解我用来制作这个的部件。
- 木头。我基本上去了我的木箱,找到了一些我从树屋里打捞出来的 4x4,还有一些我妻子为窗饰而买的精选松树(向她保证我会买更多)。我把我能找到的所有大木块都捡起来带到我的店里。我还使用了 1/4 的桦木胶合板,几年前我从 Menards 那里购买了用于不同的项目。
- 1/8 MDF 我在顶部和底部之间使用了它,只是为了让顶部有一些可以粘合的东西。回想起来,我可能可以跳过它,如果我再做一次,我会。
- 2020 年铝挤压件。我用它来构建龙门架的框架。
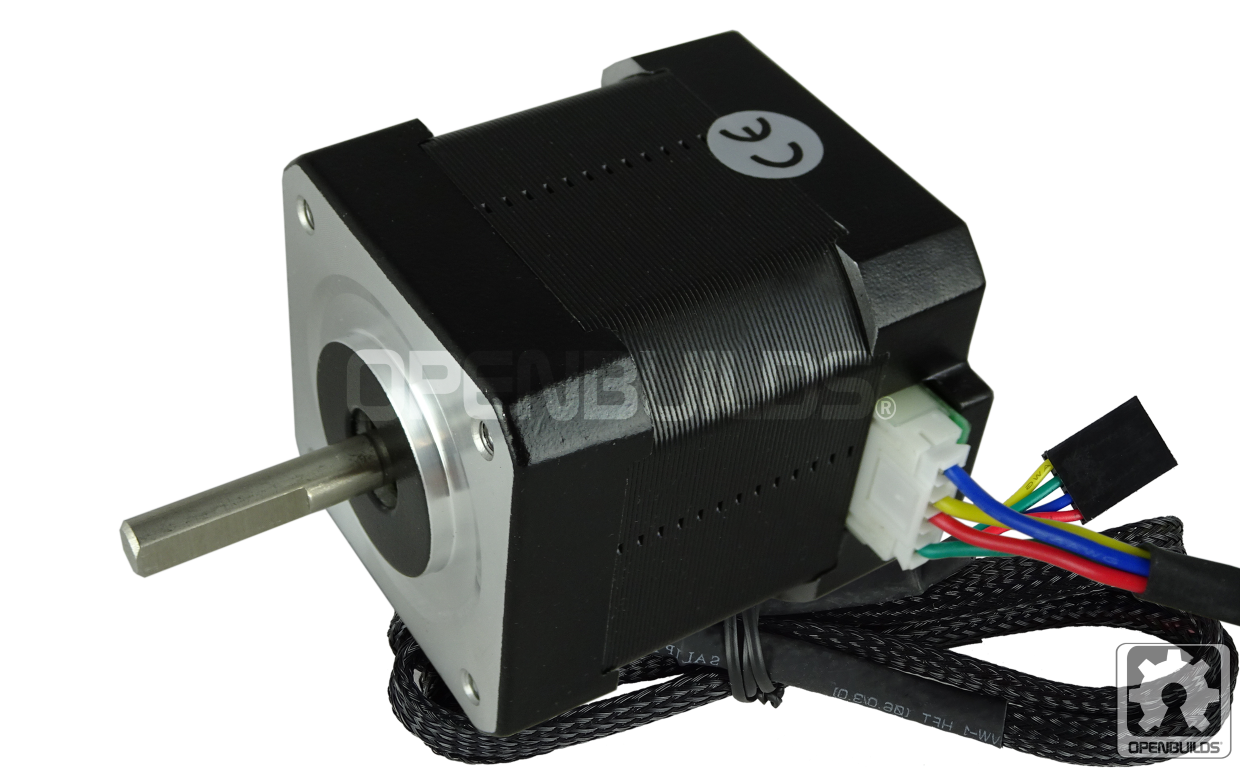
- 2 个步进电机 12.99 美元,用于两个运动轴。
- Arduino UNO 用于龙门运动。
- Arduino UNO 操纵杆模块用于控制运动。
- 8 毫米线性运动平滑杆 x 4
- 8mm 线性轴导轨安装座 x 8
- 3d 打印机部件我过去制造了许多 3d 打印机,并且手头有很多这样的部件。我最终使用了皮带、光滑杆、光滑杆轴承和其他杂项 3d 打印机类型的零件。
- Kreg 口袋孔夹具 这不是绝对需要的,但可以让建造任何类型的家具变得更加容易。在这个项目中,我在顶部使用它并将顶部连接到底座。
- 1/4in 平板玻璃 --- 本地玻璃和油漆店 -- 请注意,这不是安全玻璃,如果破碎会产生危险的尖锐碎片,但对于这个项目,我想要强度和厚度。
- 白色 LED 灯条和射频遥控器
- LM317 电压转换器
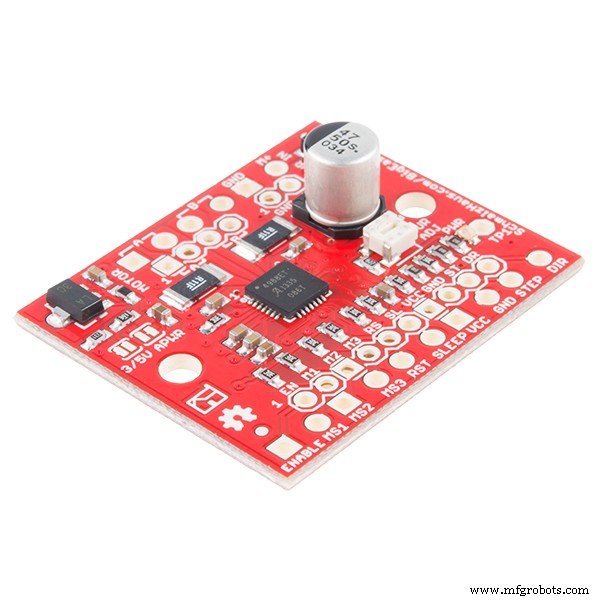
- A4988 步进电机驱动器 x 2
- 220mf 16v 电容 x 2
- 12 伏 5 安电源
- 3/4in 滚珠轴承
- 25 磅白色沙滩
- 2 袋光滑的河石
- 钕圆底磁铁
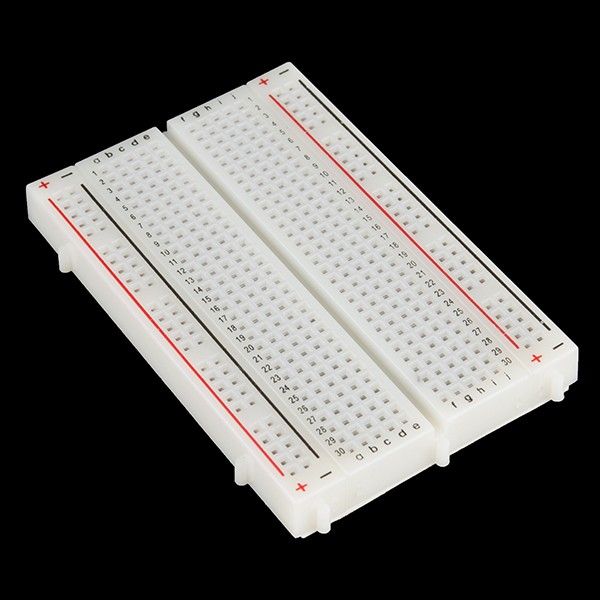
- 原型面包板
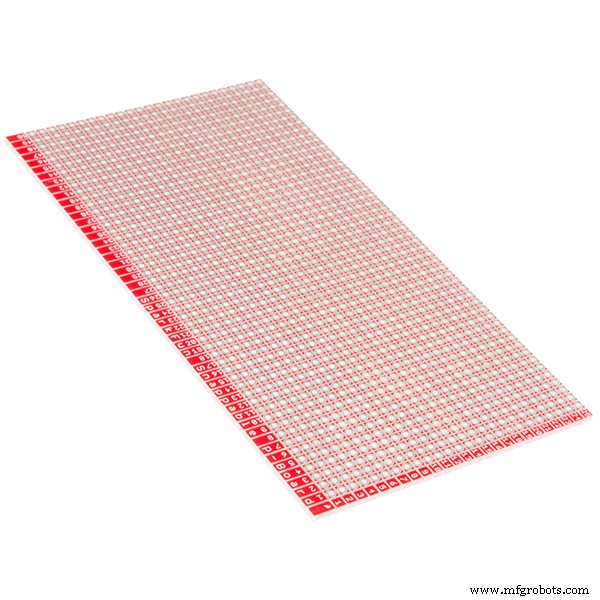
- Permaboard 焊接面包板
- 几个塑料导管 2 孔带或将龙门架固定到活板门的其他方式。
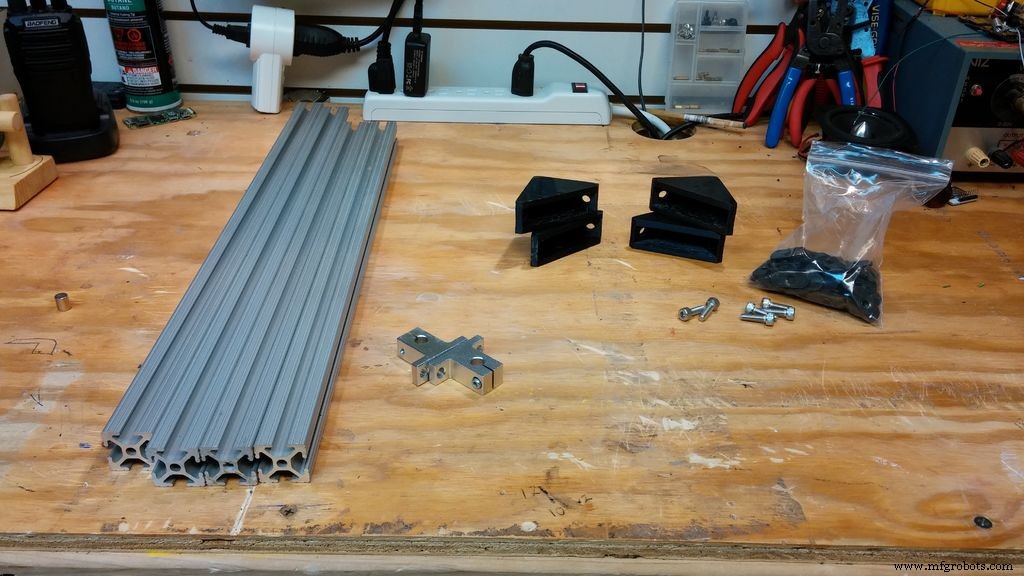
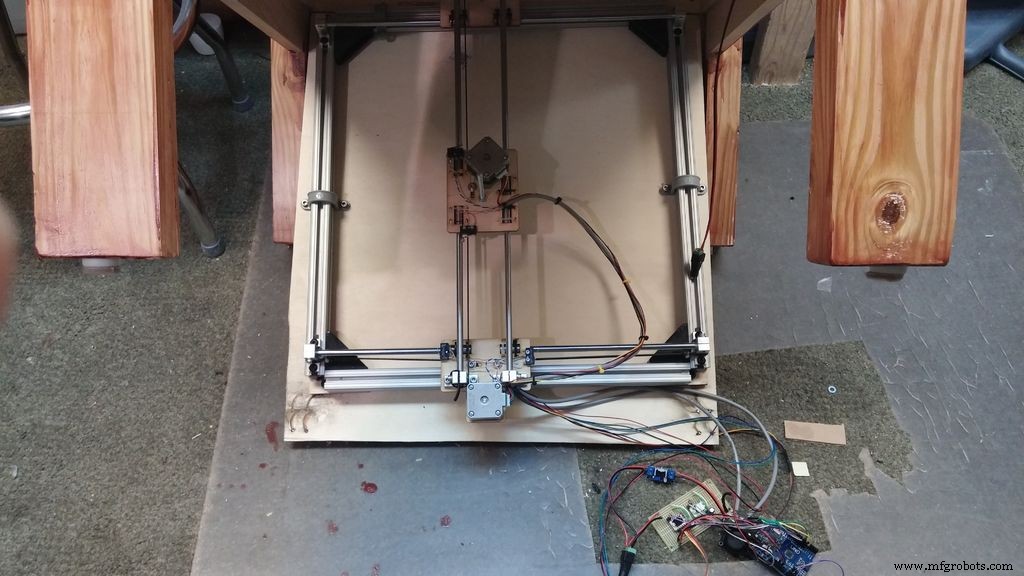
第 3 步:组装龙门
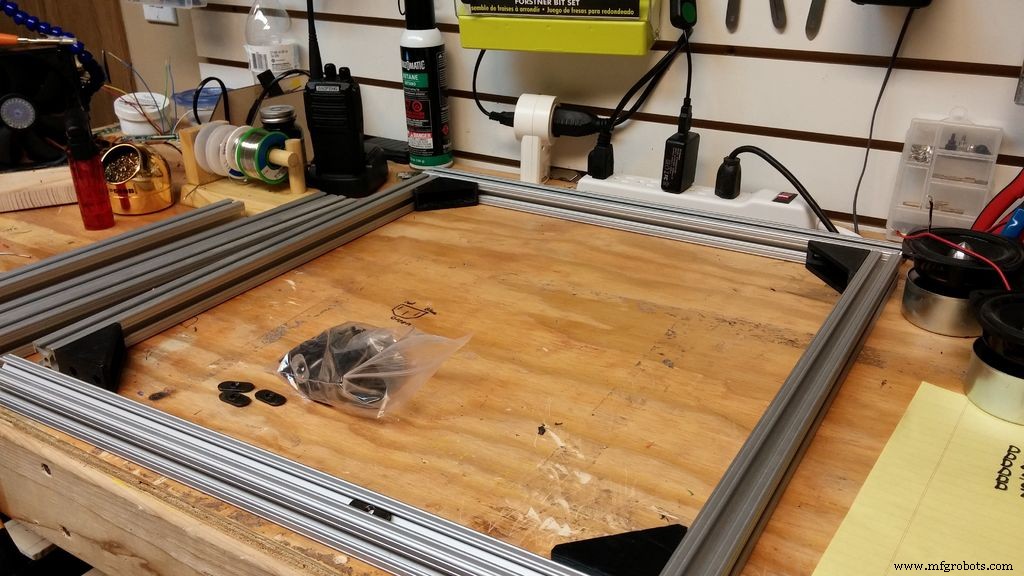


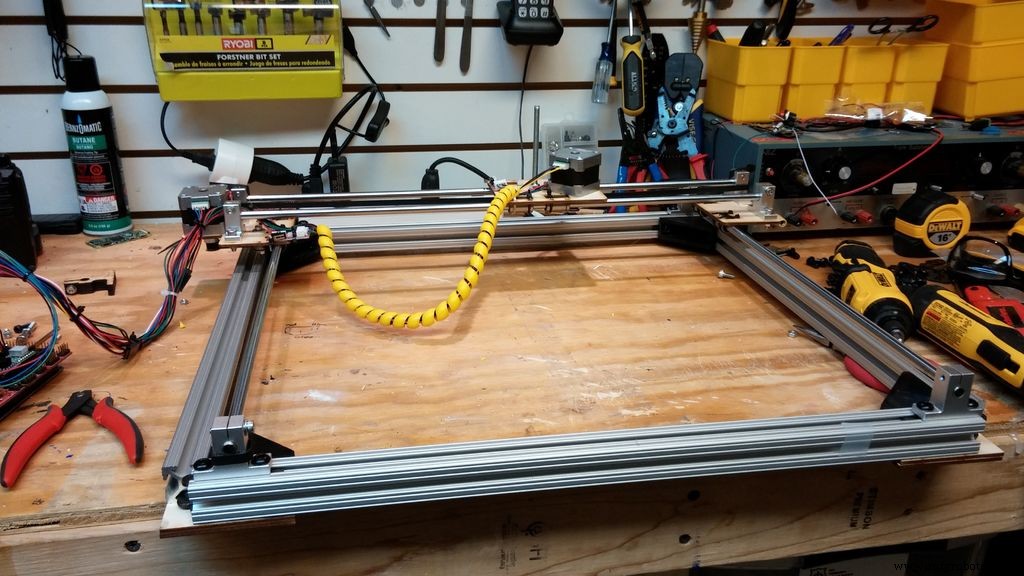
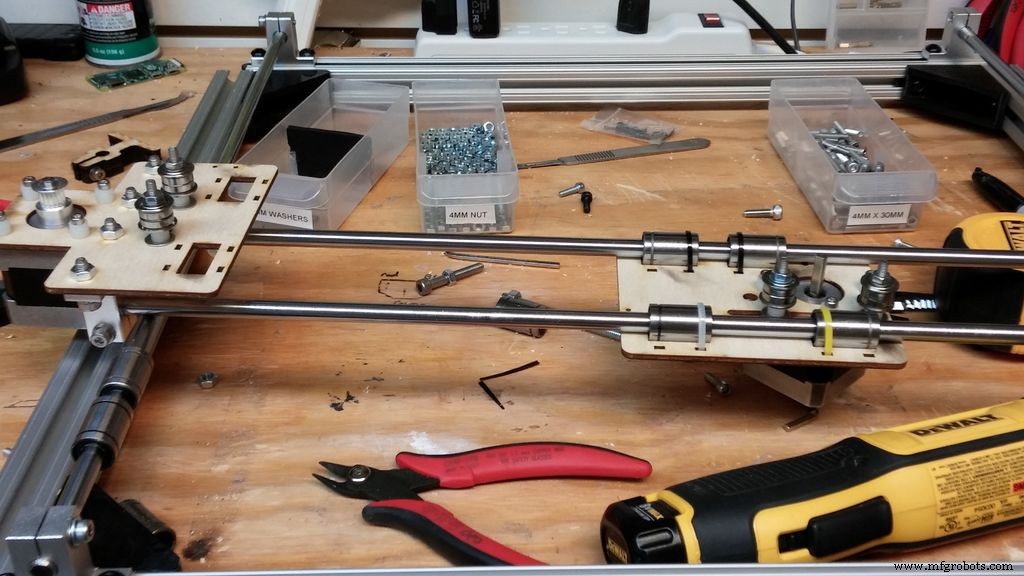
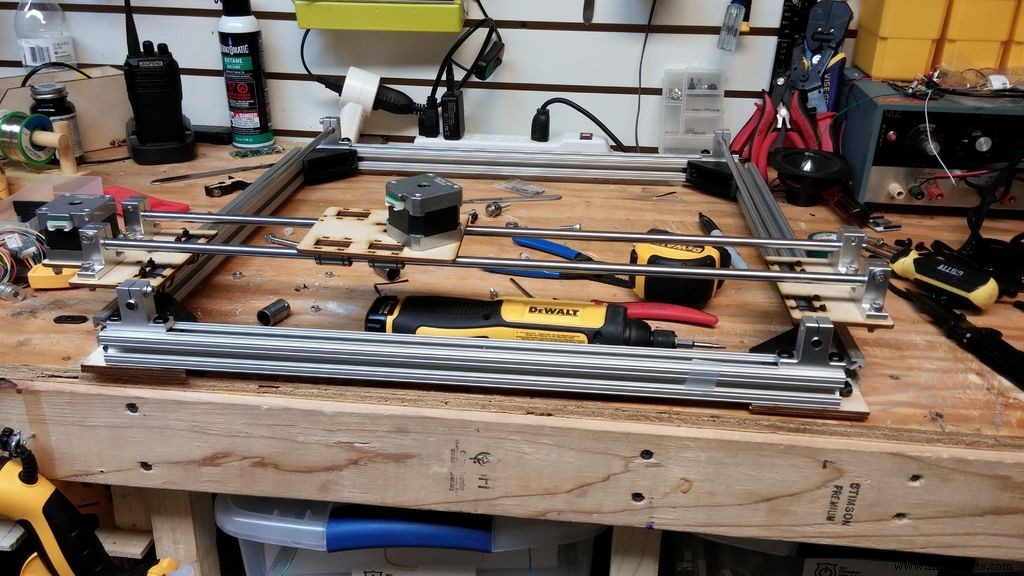
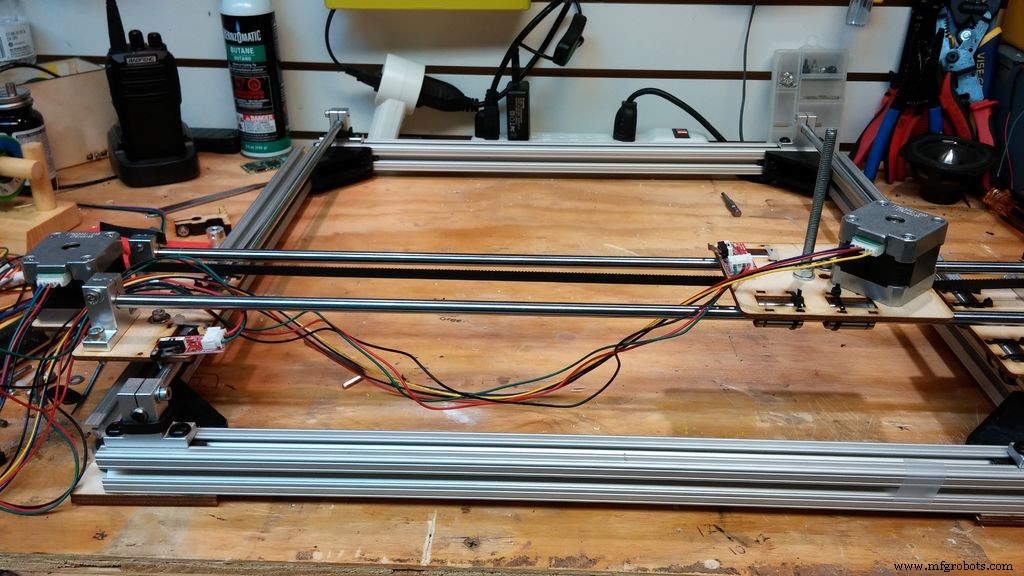
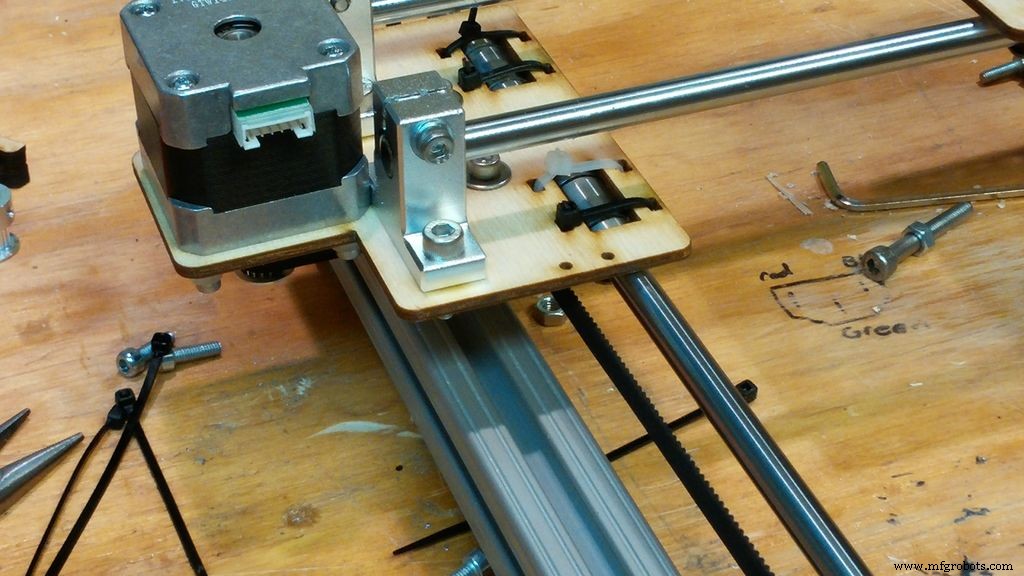
我从一些粗略的图纸开始,然后建造了龙门架。这可能不是构建它的最有效方法。这就是我这样做的方式,请记住,我试图使用其他构建等遗留下来的部件。我有一些 20/20 铝挤压件是从另一个版本中遗留下来的,所以我将其用于龙门架的框架。我设计并 3D 打印了角括号,并在此处包含了这些文件。
我还包括了 x 轴和 y 轴的激光切割部件。仔细研究图片,看看我是如何组装支架和单独的轴的。我组装托架的方式可能不是最好的方式,因为有许多不同的方式来构建龙门架,但我已经将这种方法与其他几种构建方式一起使用,并且它似乎可以正常工作,并且具有良好的可靠性。
FTY8AKAIVO3T4X1.dxf FZUAWWRIVO3T4WZ.cdr FVXPPAIIVO3T86T.stl
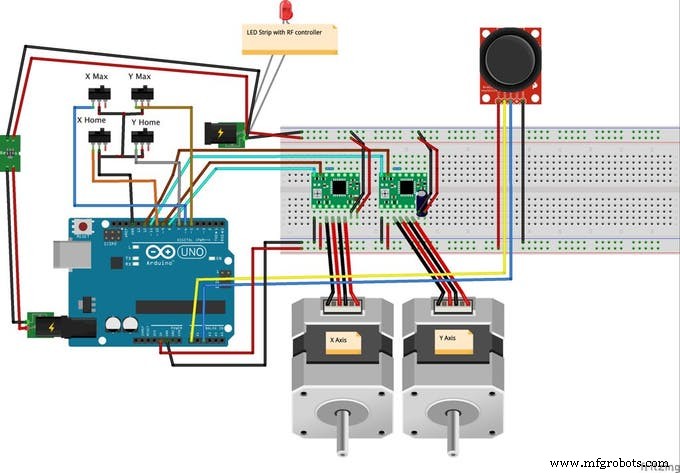
第 4 步:组装电路
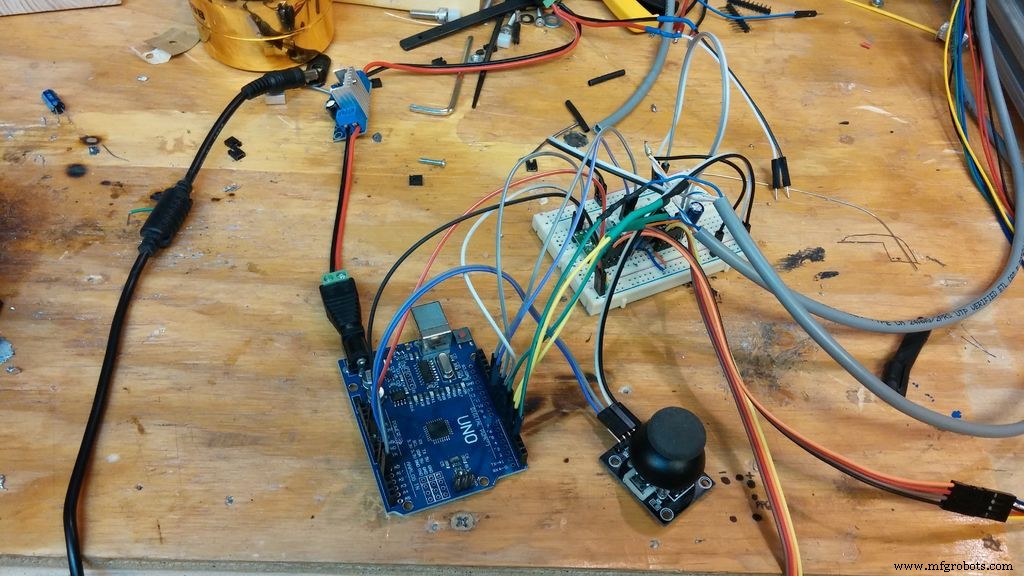
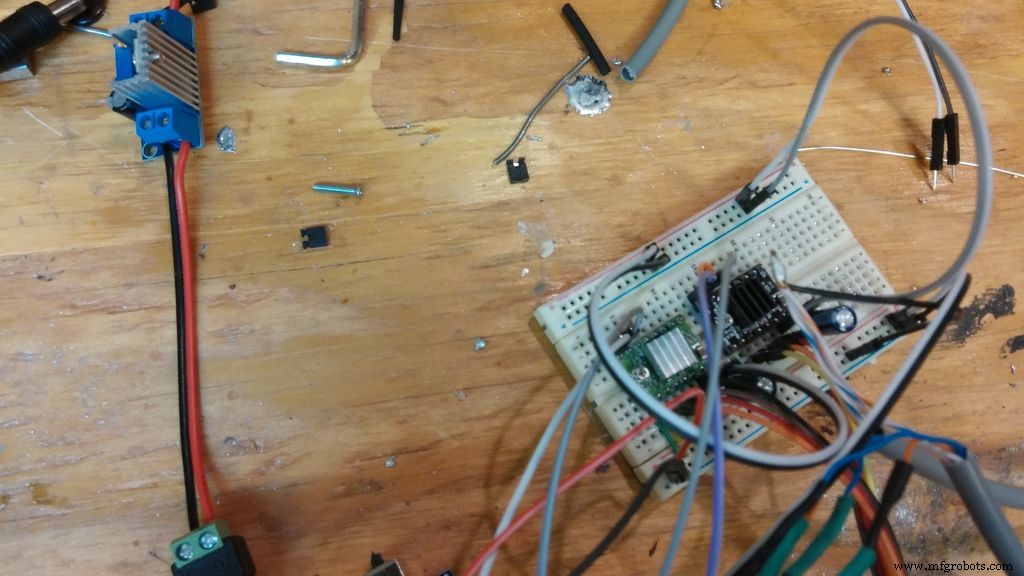

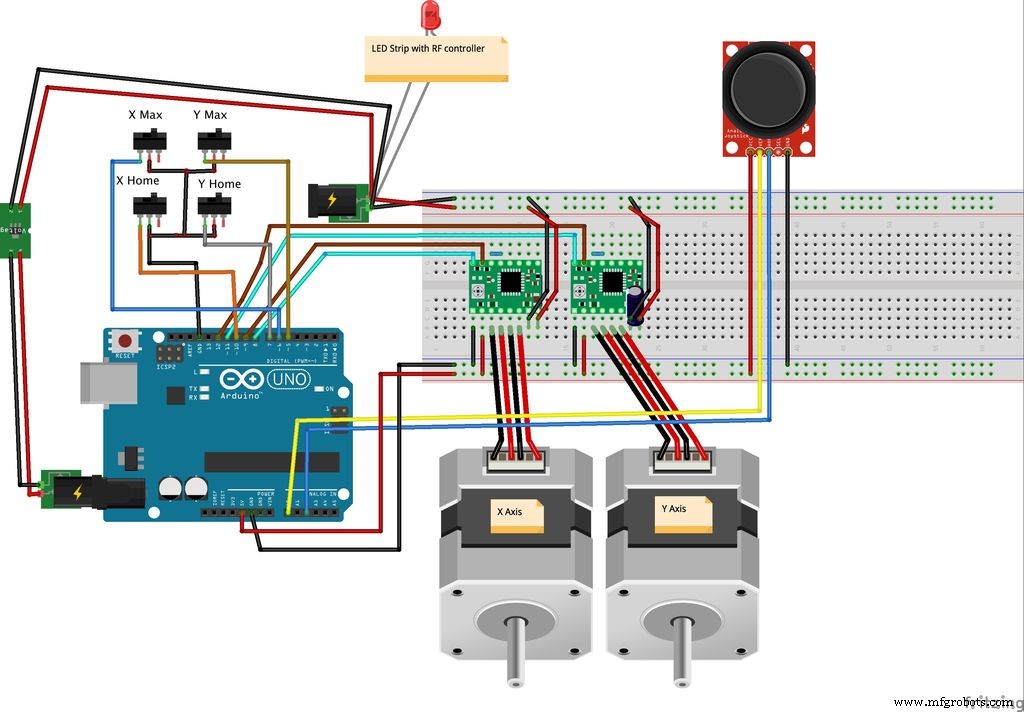
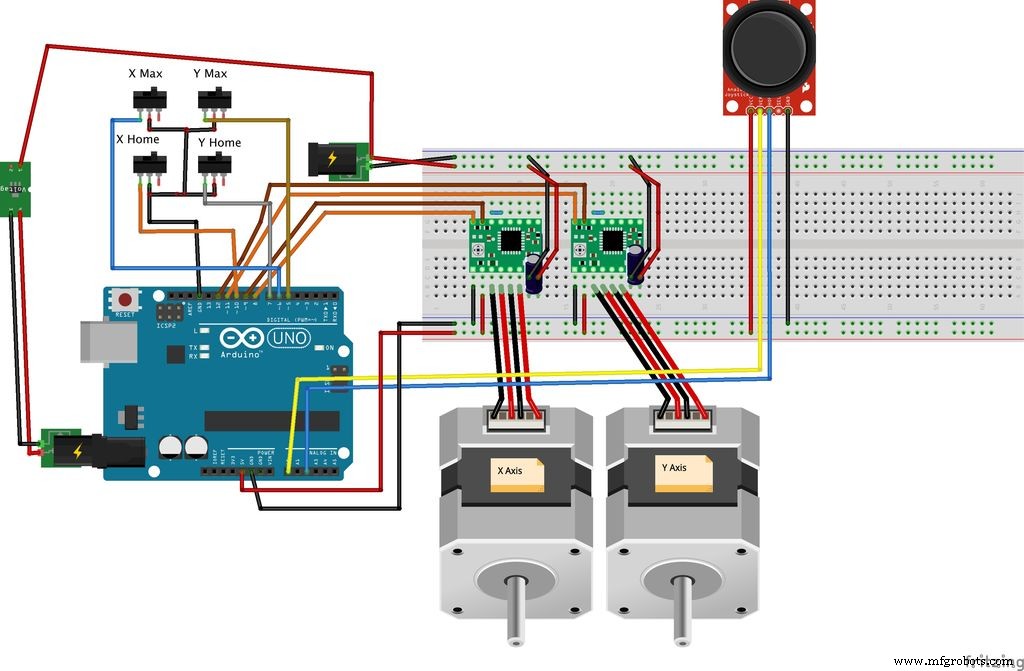
我做的第一件事是在原型试验板上组装电路,当我确定一切都按我想要的方式工作时,然后我将它转移到焊板上。我已经包含了上面的fritzing图表以帮助组装。
第 5 步:代码
我们为此编写的代码非常简单。我在 x 轴和 y 轴的最小值和最大值上都设置了终点,因此代码中没有任何内容可以确定龙门架的大小。因为代码中没有设置大小,所以你的设计比我的小还是大都没有关系。无需在代码中进行任何调整。代码在此处以 .TXT 格式和 .INO 格式提供,因此您可以下载它。
F5577MZIW6PMIF4.cpp FKOB89KIW6PMIF6.h FO9WJRBIW6PMIFY.ino F1K7N72IW6PMIGQ.zip FVI0A1ZIW6PMIGS.txt F9BIZS5IW6PMIGV.txt FGBWKEAIW6PMIGW.txt
第 6 步:测试动作
安装代码后,我对其进行了彻底的测试。我希望对角线运动先水平再垂直再水平,类似于蚀刻草图。它似乎运作良好。所以现在我要将所有连接焊接到 Arduino 以使其永久化,并考虑将其安装到表中。
第 7 步:实际表格部分
所以我开始尝试决定我将如何构建我脑海中的东西。我在想的是一种两层的盒子,在它的底部隐藏着机制。它将由隐藏在壁架下的操纵杆控制。除此之外,我真的不知道我要怎么做。
在搜索木桩后,我找到了一个从另一个项目中回收的 4x4 松木,我发现了一些非常不错的精选松木。所以在向老板保证我会更换我要拿的东西后,我把木材带到商店开始建造。
第 8 步:构建双层盒子

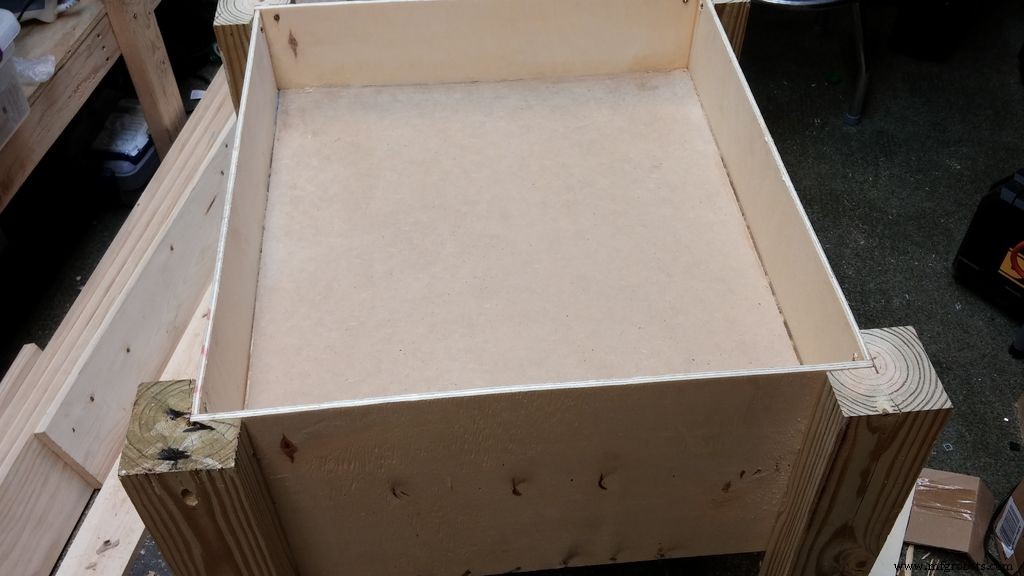




在测量和切割 1/4 英寸胶合板后,我想尝试一种新的方法,在胶水固定的情况下将其固定在一起。我将纸板热粘在角落上。这种方法似乎很有效,因为它将盒子固定在一起的时间足够长,可以采取其他措施将其固定在一起。在建立了顶部和底部的分隔并确保它是水平的后,我固定了一个钢琴铰链,以便支撑龙门架的桌子底部可以掉落以进行维护。
第 9 步:制作桌腿


对于桌腿,我想重新使用我从以前在我孩子的玩具室里的游戏屋里拉出来的 4x4 松木。首先,我确保 4x4 没有螺丝和钉子/订书钉。我测量并将 4x4 切成 4 个 25 英寸的部分。然后我继续将 4 条腿穿过平底机多次以去除油漆并清理干净。
穿过平光机几次后,我用直尺和夹子制作了一个临时夹具,这样我就可以使用像台锯这样的技能锯。它工作得很好,给我留下了 4 条干净且光滑的 L 形腿,非常适合我的目的。
第 10 步:安装侧面

腿连接好后,我开始用侧面。随后进行了大量仔细的测量。您希望尽可能靠近,以便尽可能减少间隙。我把这些碎片粘到位,然后从双层盒子的底部拧了几颗螺丝。
第 11 步:沙子和沙子更多


在构建任何形式的东西时,我建议无故打磨,从更粗的(如 80-120 粒度)砂纸开始,然后使用更细(<200 粒度)的砂纸。当项目完成时,你花在打磨任何不完美之处的时间将得到回报。
第 12 步:安装 LED 灯

一旦我知道顶部的位置,我就制作了一块 1/8 英寸的中密度纤维板,放在顶部和底部之间。我标记了这件作品的位置,然后将其倒置,并用扎带和热胶将 LED 灯条固定在下面。根据我的经验,在固定任何可能自行产生热量的东西(即灯带)时,完全依靠热胶本身是很鲁莽的。我钻了一个洞,将灯的电源线连接到双层盒子的底部。我打算用与步进电机相同的 12V 电压来运行灯,但是我遇到了问题,因为灯使电机发出嗡嗡声,所以我给灯提供了自己的 12V 电源。
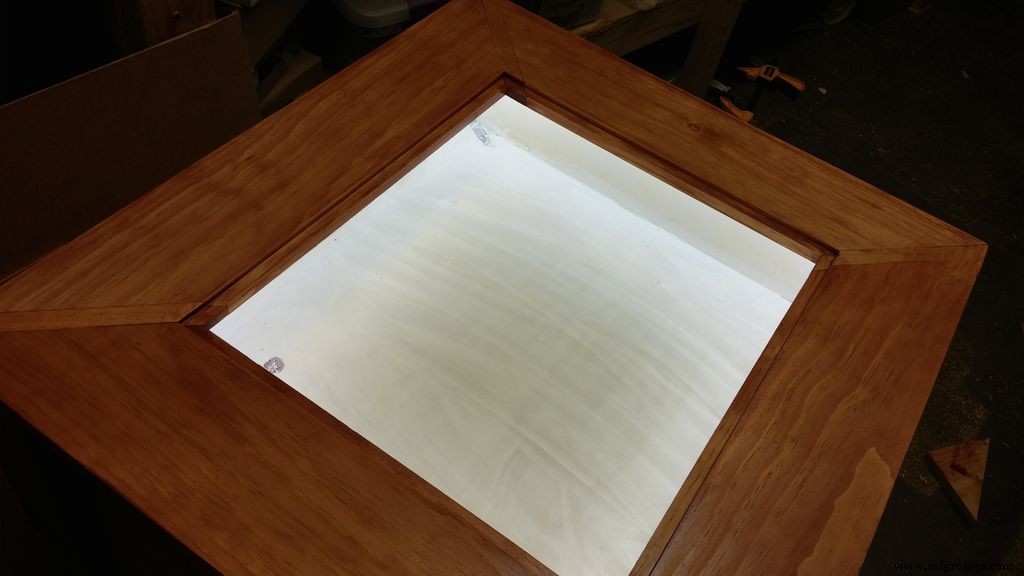
第 13 步:安装顶部
我没有很多切割斜接的经验;我不是天生的木匠。但经过多次试验和错误,我能够设计出漂亮的上衣。我使用零件步骤中提到的 kreg 夹具将顶部的四个侧面固定在一起,效果非常好。
当您测量顶部的零件时,请确保测量正确。太大了再剪或沙子比太小要好。在你切割顶部的碎片并确保它们也能按照你想要的方式组合在一起后,将各个碎片布线,以便玻璃可以齐平地安装在那里。确保路由器的深度与您的玻璃相匹配。就我而言,玻璃是 1/4 英寸。
将顶部粘合并拧在一起后,我使用腿后部的 kreg 夹具将其拧到底座上,在那里它不会被注意到。
我打电话给当地的车窗维修店,订购了比开口小 1/16 英寸的 1/4 英寸平板玻璃。我还要求他们打磨边缘,以免割伤手。我不会使用亚克力来固定玻璃,只是因为我希望能够移除玻璃以便我可以重新排列岩石。
第 14 步:修整、染色、复色、打磨和复色
因为松木是一种多孔木材,我不希望它看起来有斑点,所以我使用了木材预染色护发素来均匀染色。然后我将 Minnwax 天然樱桃聚染色剂涂在上面并让它干燥。第二天,我回来用 320 号砂纸轻轻打磨桌子,然后再涂上一层聚污渍。如果我不得不再次这样做,我会单独染色和聚合它;让污渍和聚合物涂层不留下滴痕等是一场噩梦。此外,如果您想要颜色更深,则不能再次染色以使其变暗。我最终打磨它并重新涂上几次,直到我对结果感到满意。我不认为我会再次使用 poly-stain。
第 15 步:安装电子设备

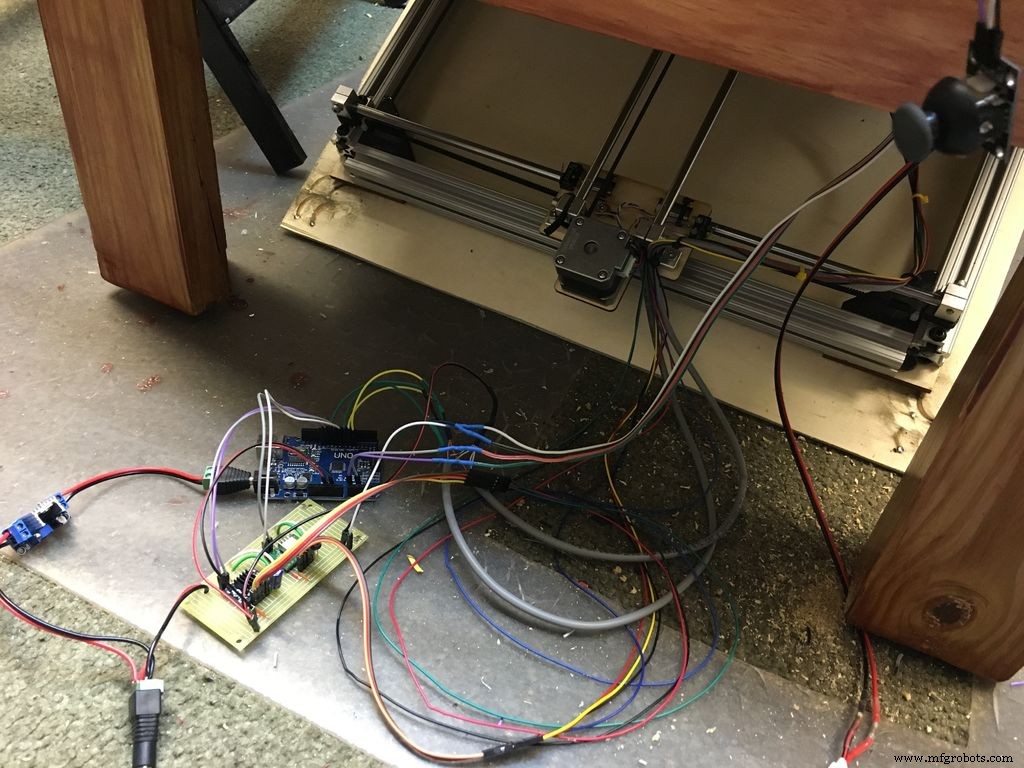
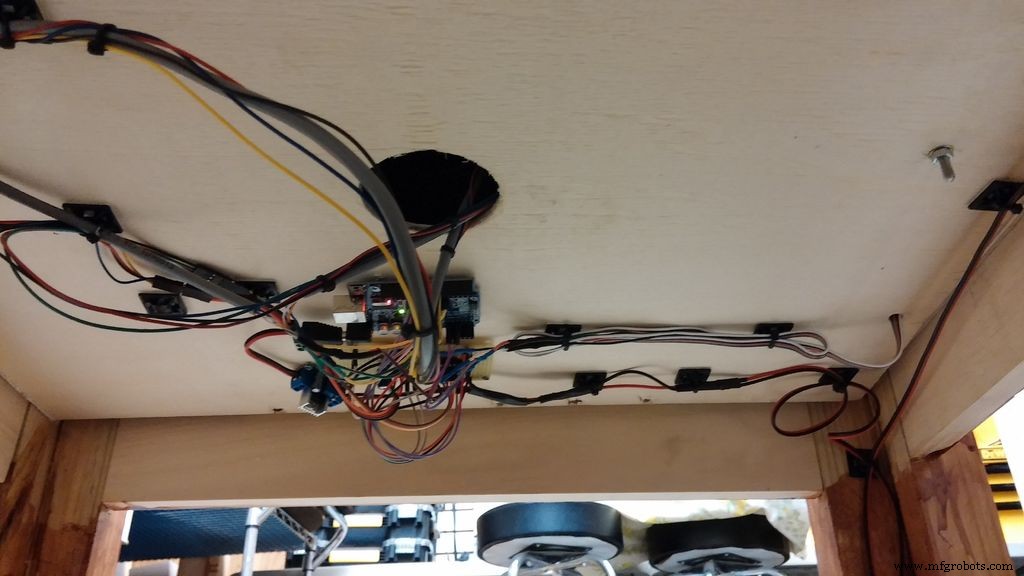


我在底部建造了活板门,这样整个龙门就可以安装到活板门上,并且可以放下来进行工作、维护或升级。我使用塑料导管 2 孔带将龙门架安装到活板门上。我在 2020 挤压件周围安装了带子。这似乎运作良好。
我尝试了几种不同的路线来安装 Arduino 和面包板。我最终在活板门底部围绕中心切了一个洞,将所有电缆穿过那个洞,然后将电子设备安装在桌子下方。
当我安装操纵杆时,我想了很长时间我将如何安装它。老实说,我想不出什么聪明的办法,所以我只是把它粘在桌子的边缘。我尽可能地将操纵杆的电缆推到角落里,然后用热胶粘住。这不是最豪华的解决方案,但除非你在它旁边爬行,否则你无法真正看到它,所以我很高兴。
在底部,我用小螺钉安装了电路板,并试图尽可能地整理好所有东西。我还将电源插头移到后腿的背面并将其粘到位。
第 16 步:工具头“磁铁头”?

我不确定如何将磁铁连接到我想使用的螺栓上。我认为螺栓会很好用,因为我可以轻松调整 z 轴。我最终做的是切割一小段(1 - 1 1/2 英寸)的 3/4 英寸销钉,然后钻一个螺栓可以装入的孔。然后我将磁铁拧入它的顶部。现在我可以通过松开底部的螺母来上下调整它。
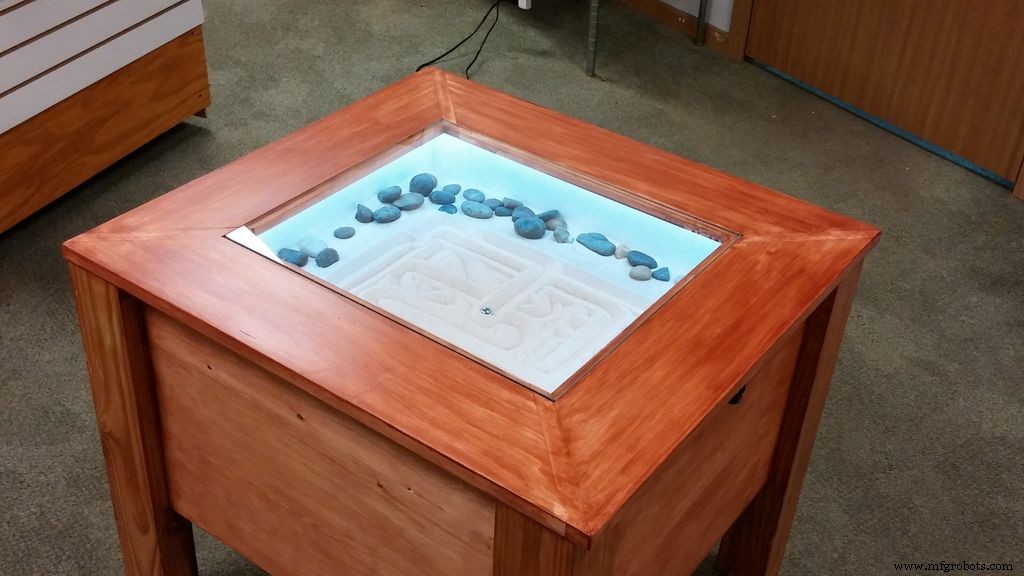
第 17 步:制作岩石花园




一旦安装了电子设备,我就着手创建岩石花园。我不确定需要多少沙子,所以我买了一盒 25 磅的沙子。事后看来,我认为我本可以减掉 5 到 10 磅。大部分沙子还在盒子里。铺好沙子后,我把球跑了一点。我想检查一下以确保当球滚来滚去时你看不到盒子的底部。我添加沙子并不断测试,直到找到我满意的沙子深度。
然后我在边缘添加了两袋光滑的河石。我试着把它们均匀地摊开。我想过把河石粘下来,但我想如果我愿意的话,将来能够重新排列它们会更好。
第 18 步:表在行动





唉,桌子,她动了。一旦我让桌子动起来,我就站在那里把球传了太久——哈哈。看着那个金属球把沙子推来推去,有一种非常令人欣慰的东西。达到这一点是一段漫长的旅程,看到这张桌子按照我设想的方式移动真是太棒了。
第 19 步:全部完成
这是一项长期艰巨的工程。不过这很有趣。
代码
- code.ino
code.inoC/C++
/* * 简单的演示,适用于任何驱动板 * * 按照指示连接 STEP、DIR * * 版权所有 (C)2015 Laurentiu Badea * * 该文件可以根据 MIT 许可条款重新分发。 * 此许可证的副本已包含在文件 LICENSE 中的此分发中。 */ /* * 由 Ernest E Garner 从 StepperDriver 库中编辑 * 日期:20-11 月 2016 * * 代码描述:* 用于控制由 Ernest James Garner 为 Instructables 创建的 Zen 表的基本 x/y 龙门架.com */#include#include "BasicStepperDriver.h"//#define DEBUG// 电机每转步数。大多数步进器是200步或1.8度/步#define X_MOTOR_STEPS 200#define Y_MOTOR_STEPS 200//电机方向到家//选项1(向前)// -1(反向)#define STEP_FORWARD 1#define STEP_REVERSE -1#define X_DIR_HOME STEP_FORWARD#define Y_DIR_HOME STEP_FORWARD// 全部功能所需的所有电线#define X_MAX_PIN 6#define X_HOME_PIN 7 //home pin.#define X_DIR_PIN 8#define X_STEP_PIN 9#define X_ANALOG_PIN A0#define Y_MAX_PIN 5#define Y_HOME_PIN_PIND1 11#define Y_STEP_PIN 12#define Y_ANALOG_PIN A2// 由于微步进是在外部设置的,请确保它与所选模式匹配// 1=全步,2=半步等。#define MICROSTEPS 1// 2 线基本配置,微步在驱动程序上硬连线BasicStepperDriver x_stepper(X_MOTOR_STEPS, X_DIR_PIN, X_STEP_PIN, X_HOME_PIN, X_MAX_PIN);BasicStepperDriver y_stepper(Y_MOTOR_STEPS, Y_DIR_PIN, Y_STEP_PIN, Y_HOME_position, Yint_0 setup;ana_int_log_position;ana_0 () { #ifdef DEBUG Se里亚尔.开始(9600); #endif /* * 设置目标电机转速。 * 这些电机最高可达到 200rpm。 * 太高会导致高音调的呜呜声并且电机不会移动。 * * 我们希望这些电机缓慢移动。 */ x_stepper.setRPM(100); y_stepper.setRPM(100); /* * 告诉驱动程序我们选择的微步级别。 * 如果不匹配,电机将以与选择不同的 RPM 移动。 */ x_stepper.setMicrostep(MICROSTEPS); y_stepper.setMicrostep(MICROSTEPS);}void loop() { /* * 使用度数表示将电机移动一整圈 */ // 1024/2 =512 // 512 - 40 =472 // 512 + 40 =552 x_analog =模拟读取(X_ANALOG_PIN); // 拉动操纵杆反转且未按下 HOME //if ((x_analog <472) &&(digitalRead(X_HOME_PIN)==HIGH)) { if ((x_analog <472)) { x_stepper.move(-40); } else if ((x_analog> 552)) { x_stepper.move(40); } #ifdef DEBUG Serial.print("X:"); Serial.print(x_analog); //Serial.print(x_stepper.getDirection()); #endif y_analog =analogRead(Y_ANALOG_PIN); //if ((y_analog <472) &&(digitalRead(Y_HOME_PIN)==HIGH)) { if ((y_analog <472)) { y_stepper.move(-40); } else if ((y_analog> 552)) { y_stepper.move(40); } #ifdef DEBUG Serial.print(" Y:"); Serial.println(y_analog); //Serial.getDirection(y_stepper.#endif}
定制零件和外壳
fty8akaivo3t4x1_u1xz65PyoT.dxf fzuawwrivo3t4wz_PdKRLpvu3f.cdr示意图
制造工艺