

飞行时间技术有望提高准确性
ADI 公司 (ADI) 和 Microsoft 合作开发飞行时间 (ToF) 3D 成像解决方案,目标是在任何场景条件下都能提供更高的精度。 ADI 将利用 Microsoft 的 Azure Kinect 3D ToF 技术并添加其技术 IC 和系统专业知识,以创建更易于采用的解决方案。目标是覆盖工业 4.0、汽车、游戏、增强现实以及计算摄影和摄像等领域的广泛受众。
行业市场分析师估计,在具有挑战性的环境中使用的 3D 成像系统将出现强劲增长,并且需要人类协作机器人、房间映射和库存管理系统等尖端应用将工业 4.0 带入生活。还需要 ToF 应用程序来创建具有占用检测和驾驶员监控功能的更安全的汽车驾驶环境。
在接受 EE Times 采访时,增强成像和解释高级总监 Tony Zarola 和 ADI 战略营销经理 Carlos Calvo 强调了此次合作的基础。 Zarola 说,“ Microsoft 已成为图像传感器制造商 3D ToF 性能的基准,并为 ADI 提供核心像素技术,这是 ADI 正在构建的传感器和解决方案的基础。几十年来,他们开发了在智能边缘或智能云上运行的最佳数据捕获和革命性算法所需的专业知识。我们期待结合 Microsoft 和 ADI 在芯片、系统、软件和光学方面的最佳能力。”
3D ToF 设计
手势识别是设备识别人体一系列动作的能力。电子技术基于相机和 IC 的帮助,用于识别和扫描 2D 或 3D 配置文件中的场景。飞行时间技术包括向目标发射激光束并分析信号的反射。
3D 飞行时间或 3D ToF 是一种没有扫描仪的 LIDAR(光探测和测距),它使用纳秒级的高功率光脉冲从场景中捕获深度信息(通常是短距离)。各种 IC 解决方案在手势识别软件算法的帮助下,创建接收图像的深度图,实时响应身体动作。手势识别技术的主要优点是个体与控制系统之间不需要物理接触。
ToF 相机通过调制激光和激光波长敏感传感器照射物体以捕获反射光来测量距离。传感器测量从发出光到相机接收到反射光之间的时间延迟。测量时间延迟的方法有多种,其中两种已成为常用方法:连续波 (CW) 法和脉冲法。绝大多数 ToF 传感器是 CW 并使用 CMOS 传感器。
有许多混杂因素使飞行时间 (ToF) 测量变得困难:干扰环境光、光从场景中的物体反射而导致的多径效应破坏真实距离、温度效应、距离模糊。 “挑战从硅开发到创建一个完整的系统,该系统的性能与各部分的理论总和一致,”卡尔沃说。 “不可能孤立地看待每个组件。例如,具有最佳传感器但配备未优化镜头的 ToF 相机的整体系统性能会很差。”
“从表面上看,ToF 相机与 RGB 相机有相似之处。一个关键的区别是,根据应用,RGB 相机的图像质量的判断具有一定程度的主观性;其他应用程序只能通过高级后处理启用。 ToF 相机测量客观物理量(距离),根据应用,用户可能非常依赖图像的准确性。 RGB 相机中的一些光学缺陷(例如镜头眩光)会产生有时被认为具有艺术效果的伪像(例如阳光眩光)。 Calvo 补充道,在 ToF 系统中,如果不彻底减少镜头眩光,就会在存在物体强烈反射的情况下削弱整个系统的性能。”
用于飞行时间的 CMOS 传感器由发射器和接收器组成;它可以在单像素级别计算物体的距离,性能接近160 fps。
“在芯片级,必须考虑信号链的关键元素:激光驱动器、具有集成读出功能的 ToF 图像传感器,最后是深度计算引擎。挑战始于在图像传感器本身中设计具有高响应度和高调制对比度的像素,并最终形成可由下一个应用层解释的 3D 点云。
“除了组件,关键挑战来自深度相机的设计和生产,因为光机械设计、校准、电气设计和软件实施都是耗时且具有挑战性的。模拟设备公司 (ADI) 为我们的客户解决了这些挑战,以简化他们的设计流程,”Calvo 说。
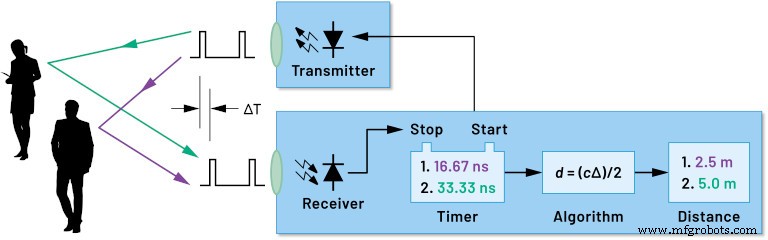
图 1. ToF 框图。 (来源:ADI)
像素从场景的不同部分收集光,它们的重组将构成重建的图像。所有传感器像素都由解调和调制块之间的相关性控制。每个像素都可以用图2所示的模型来近似。
在积分时间内,通过激活相关控制信号,电流被引导至节点 A (Da) 或节点 B (Db)。读取是在解调停止的情况下进行的,因此系统可以读取整个位序列。 ClkA 和 ClkB 以所选调制频率在时间 tInt1 内进行 180 度异相调制。与 ClkA 和 CLkB 时钟相关的接收光的相位决定了 DA 和 DB 信号。积分结束时,ClkA &ClkB 关闭,读取阶段通过对积分信号(BitlineAInt1-BitlineBInt1)进行采样来进行。
光子到电流的转换由具有泊松分布的量子过程控制。让我们了解系统优劣的参数是量子效率,即产生的电子数量与激活相应像素的光子数量之间的比率。电子的数量取决于实际的调制光和与噪声效应相对应的环境光。设计飞行时间系统时要选择的一个参数是 FoV(视场)。 FoV必须根据场景的覆盖要求选择合适的。
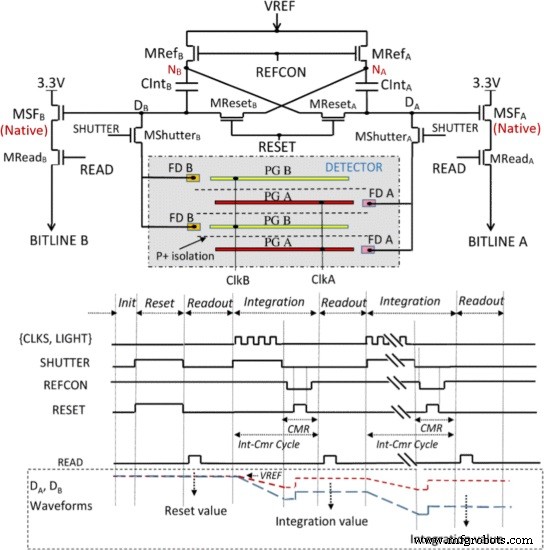
图 2. 像素的电路和时序。 (来源:https://ieeexplore.ieee.org/document/6964815)
为了在高频下实现高效率,该芯片可以使用0.13 μm混合信号低功耗CMOS工艺制造,并稍作修改以支持高效的飞行时间操作。
ADI 和微软
微软与 ADI 的合作旨在增强 ToF 技术:ADI 正在设计一系列新的 ToF 3D 图像传感器,其精度将低于一毫米,并将兼容雷德蒙德巨型生态系统,基于微软深度、智能云和智能边缘平台。
“我们坚信,这种合作将影响所有主要行业——消费、工业、医疗保健和汽车。直到现在,微软开发的技术还不能广泛用于规模化的商业应用。我们相信由微软成像技术提供支持的 ADI 解决方案将全面改变游戏规则,”Zarola 说。
有明显的安全系统应用来增强面部识别以及推进安全措施以实现更高效的工厂自动化。工业 4.0 将随着协作机器人与人类一起安全地工作而不会被隔离在“无人”区域而发生转变,并且物流的进一步优化将通过 ToF 精度实现箱子和托盘尺寸。
Zarola 补充说:“更复杂的占用检测将提高能源效率、安全系统和人机交互。从家庭到汽车,我们与 Microsoft 的 ToF 合作将使新的游戏体验能够在现实世界中放置虚拟对象并与之交互,改变我们与汽车的交互方式,并通过监控驾驶员和乘客等方式提高安全性。 ToF 技术的潜在用例广泛且不断发展,因此今天的主要应用预计明天将被新想法所取代。”
Zarola 和 Calvo 已经说明了他们的客户希望在很宽的温度范围内获得毫米深度分辨率和精细空间分辨率。实现这种性能需要在硬件和软件层面实现极高水平的时间同步。 “控制激光器的信号与传感器中的像素之间的 10ps 定时错位会导致最终距离估计的误差为 1.5 毫米。如果这还不够困难,那么还需要在很宽的温度范围内保持飞行时间系统的准确性,这需要联合设计的高级处理和校准算法,”Calvo 说。
对 ToF 系统的一个具体批评是它们可以运行的调制频率以及 ADI 最集中的地方。大多数深度估计误差源往往被调制频率“划分”。 Zarola 说:“我们的目标是提高 ToF 系统的平均调制频率,从而允许以更低的深度噪声进行测量,并减少多径或环境光散粒噪声的不利影响。”
Zarola 补充道:“ADI 还在寻求解决关键挑战,这些挑战使深度相机的设计和生产既耗时又困难。我们正在承担机械对准、光学设计、校准、电气设计和软件实施以及图像捕获中的传统障碍。”
微软在 HoloLens 混合现实设备和 Azure Kinect 开发套件中使用的飞行时间 (ToF) 3D 技术与 ADI 的定制解决方案相结合,将使新一代高性能应用程序得以实施和可扩展,同时优化上市时间。
>> 本文最初发表于我们的姊妹网站 EE Times。
嵌入式