

基准有助于梳理 ADAS SoC 指标
汽车芯片公司一直在谈论专为高级驾驶辅助系统设计的片上系统。
但是我们其他人——记者、分析师以及最重要的汽车制造商——如何区分 ADAS SoC?
事实是,我们不能。缺乏科学工具和基准测试别无选择,只能听从供应商的话。或者我们依靠每秒万亿次操作 (TOPS) 等不完善的衡量标准来比较 Intel/Mobileye 的 EyeQ5 与 Nvidia 的 Xavier,这可能是一个笨蛋。
大约一个月前,为嵌入式硬件开发基准测试的行业联盟 EEMBC 推出了“ADASMark”,这是一款自动驾驶基准测试套件,现已可授权使用。
据 EEMBC 称,新工具套件旨在帮助一线和汽车制造商在设计自己的 ADAS 系统时优化对从 CPU 到 GPU 和硬件加速器等计算资源的使用。
The Linley Group 的高级分析师 Mike Demler 对 ADASMark 表示欢迎,并指出:“很高兴看到这不仅仅是一个抽象的性能指标,而且他们使用了真实的工作负载。” Demler 表示,来自卡尔加里工程设计服务公司 AU-Zone Technologies 和 NXP Semiconductors 和德州仪器等芯片供应商的参与使得 EEMBC 的测试比百度的通用 DeepBench 更有意义。
一切都与框架有关
EE Times 采访了 EEMBC 总裁兼首席技术官 Peter Torelli,询问汽车制造商在着手设计高度自动化的汽车时面临的挑战。
毫无疑问,越来越多的汽车嵌入式系统部署多核。然而,正如 Torelli 指出的那样,“仍然很少有框架可以利用其非对称计算资源。”他补充说:“如果没有框架,编译基准的每个实例都会因硬件而异,这使得跨平台的比较变得极其困难。框架只需很少的修改即可促进可移植性。”
考虑下面的 ADASMark Pipeline,他说。
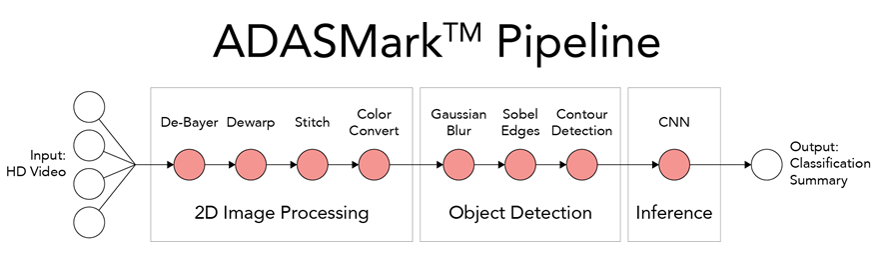
(来源:EEMBC)
Torelli 说:“这个系统的基准性能可能是在流水线的所有阶段使用相同的 CPU。但是,如果开发人员想在最后阶段更换定制的神经网络芯片怎么办?或者使用专用的 DSP 进行色彩空间转换?”
这就是框架的用武之地。
“如果没有框架,开发人员将需要插入代码来连接基准测试和计算设备(NN、DSP 或 GPU)。这是耗时、复杂且容易出错的,并且很容易破坏基准测试的意图(或破坏结果)。”
Torelli 解释说,一个框架使计算设备的重新定位变得更加容易。
EEMBC 最初检查了当今市场上可用的选项。 “AMP 和 OpenAMP 试图解决这个问题,但它们是对称多核的规范,在这里并没有真正帮助我们,”Torelli 说。 “我们还研究了 OpenCV 和 OpenVX,但在制造商的环境中支持参差不齐。”
这就是 EEMBC 基于具有更相关工作负载的新框架开发 ADASMark 的原因。
专注于成像管道
根据 EEMBC 的说法,ADASMark 基准套件的主要功能“包括 OpenCL 1.2 嵌入式配置文件 API,以确保计算实现之间的一致性;由一系列微基准创建的应用程序流,用于测量和报告处理计算机视觉、自动驾驶和移动成像任务的 SoC 的性能;以及由 Au-Zone Technologies 创建的交通标志识别 CNN 推理引擎。”
由于 ADAS 需要计算密集型对象检测和视觉分类功能,因此 ADASMark 的重点是成像管道。 EEMBC 解释说,它看起来使用“代表高度并行应用的真实工作负载,例如环绕视图拼接、轮廓检测和卷积神经网络 (CNN) 交通标志分类”。
物联网技术