

由 Photoneo MotionCam-3D 提供支持的实时混合箱码垛
作者:帕维尔·索拉尔•April152026
Photoneo 的 MotionCam‑3D 提供了关键的视觉智能,使 Jacobi Robotics 和 Delta Technology 能够将混乱且容易受伤的码垛生产线转变为全自动实时系统。
概览
- 挑战: 自动化手动码垛线处理随机、无序的包裹,从而产生安全性和可靠性问题。
- 缺少链接: 实时、高保真 3D 感知,“查看”每个传入案例并验证传出堆栈的稳定性。
- 视觉解决方案: Photoneo MotionCam-3D。
- 合作伙伴: Photoneo(视觉)+ Jacobi Robotics(软件)+ Delta Technology(集成)+ FANUC(运动)。
结果: 实时生产单元可提供 100% 托盘稳定性,并在货物进入堆叠之前检测到损坏的货物。
挑战:盲人机器人无法应对混乱
在一个主要的国防制造商工厂中,装运码头是一个瓶颈。操作员通过传送带手动构建托盘,传送完全随机的箱子 - 重量(最多 27.2 公斤/60 磅)、尺寸和状况各不相同。
Delta Technology 提供了集成专业知识,Jacobi Robotics 提供了规划引擎,但该系统遇到了一个基本的物理问题:无法“看见”的机器人无法处理混乱。
在没有预先分类的棕地环境中,机器人不知道接下来会发生什么。传统的自动化依赖于固定的配方,但这里的配方每秒都在变化。解决方案需要能够在几毫秒内捕捉现实的眼睛。
解决方案:MotionCam‑3D 作为事实来源
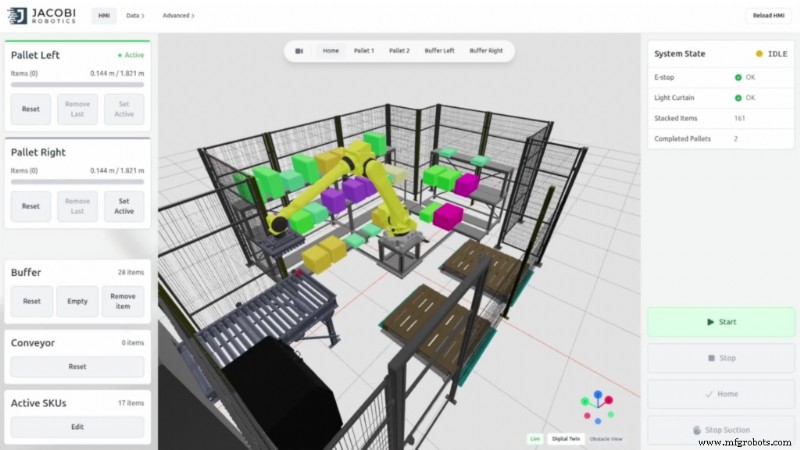
为该单元配备 Photoneo 的 MotionCam‑3D 解决了这个问题。与需要传送带停止的静态扫描仪不同,MotionCam‑3D 可捕获运动中物体的高分辨率 3D 点云,将精确的实时数据输入 Jacobi 的 OmniPalletizer,而不会降低吞吐量。
视觉系统执行两个关键任务角色:
1。馈送扫描仪:运动中的准确感知

随着案件的进展,MotionCam‑3D 充当看门人的角色。
- 实时尺寸标注: 扫描仪可立即测量每个盒子的长度、宽度、高度和方向,为雅可比的路径规划器提供解决最佳放置“俄罗斯方块”难题所需的数据。
- 质量控制: 高保真 3D 数据可在之前检测到压碎的角落、打开的襟翼或结构损坏 机器人挑选一个箱子。损坏的箱子会被标记并拒绝,从而防止堆叠不稳定并确保货运公司合规。
2。验证扫描仪:关闭循环

在混合箱码垛中,放置精度至关重要。机器人放置箱子后,进行二次目视检查,确认实际情况与计划相符。
- 展示位置验证: 确认盒子处于正确的坐标和方向。
- 堆栈稳定性检查: 扫描建筑层以确保托盘保持平坦和稳定,即使堆垛上升也能保证 100% 的稳定性。
合作为何有效
此部署表明成功的棕地自动化是一种生态系统游戏。
如果输入数据错误,即使是最先进的人工智能规划器也无法构建稳定的托盘。 Photoneo 为雅可比的“大脑”提供了一个又一个周期的完美现实图景。
- Photoneo: 眼睛 – 高质量 3D 数据和质量控制。
- 雅可比机器人公司: 大脑 - 实时路径规划和物理感知逻辑。
- 发那科: 肌肉——可靠的工业机器人。
- 台达科技: 车身 – 无缝集成到仓库地板中。

结果:经过验证、安全且可扩展
通过赋予机器人查看、测量和验证的能力,制造商取得了盲目自动化无法比拟的成果:
- 100% 稳定性: 经过视觉验证的堆叠可消除运输过程中的产品损失。
- “惊喜”带来的零停机时间: 在造成故障之前识别并阻止损坏的盒子。
- 高立方体利用率: 精确的尺寸使 Jacobi 能够包装托盘的密度高达 90%,优于人工堆垛。
- 模拟到真实的准确度: 3D 数据准确性使仿真能够与现实世界的周期时间相匹配,且误差为零。
该项目将混合箱码垛从“科学项目”转变为强大的工业现实,由卓越的视觉和智能软件的合作提供支持。
自动化控制系统