

提高功率因数的方法及其优缺点
提高功率因数的方法
以下装置和设备用于提高功率因数。
- 静电电容
- 同步冷凝器
- 相位推进器
1.静电电容
我们知道,大多数行业和电力系统负载都是电感性的,它们会吸收滞后电流,从而降低系统功率因数(请参阅低功率因数的缺点)。为了提高功率因数,静态电容与那些工作在低功率因数的器件并联。
这些静态电容器提供超前电流,以中和(完全或近似)负载电流的滞后电感分量(即超前分量中和或消除负载电流的滞后分量),从而提高负载电路的功率因数。
这些电容器安装在感应电机和变压器等大电感负载附近,提高负载电路的功率因数,以提高系统或设计效率。 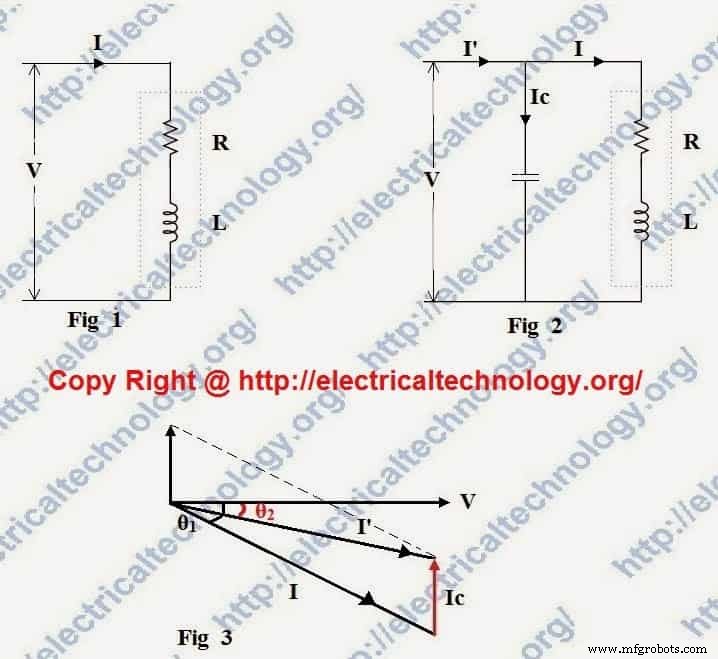
假设,这里有一个单相感性负载,它取滞后电流(I),负载功率因数为 Cosθ,如图 1 所示。
在图 2 中,电容器 (C) 与负载并联。现在电流 (Ic) 流过与电源电压相差 90° 的电容器(请注意,电容器提供超前电流,即在纯电容电路中,电流与电源电压相差 90°,换句话说,电压为 90°滞后于当前)。负载电流为 (I)。 (I) 和 (Ic) 的向量组合是 (I'),它滞后于 θ2 处的电压,如图 3 所示。
从图 3 可以看出,θ2 <θ1 的角度,即 θ2 的角度小于 θ2 的角度。因此 Cosθ2 小于 Cosθ1 (Cosθ2> Cosθ1)。因此负载功率因数通过电容器得到改善。
另请注意,在功率因数改善后,电路电流将小于来自低功率因数的电路电流。此外,在功率因数改善之前和之后,该电路中电流的有源分量将相同,因为电容器仅消除了电流的无功分量。此外,功率因数改善前后的有功功率(以瓦特为单位)相同。
优点:- 与其他提高功率因数的方法相比,电容器组具有多项优势。
- 静态电容器的损耗很低
- 没有移动部件,因此需要低维护
- 可在正常条件下(即普通大气条件)工作
- 安装不需要地基
- 它们很轻,因此很容易安装
- 静态电容器组的使用年限更短(8-10 年)
- 随着负载的变化,我们必须打开或关闭电容器组,这会导致系统出现开关浪涌
- 如果额定电压升高,则会对其造成损坏
- 一旦电容器损坏,维修成本很高
2。同步冷凝器
当同步电机在空载运行并过度退出时,它被称为同步冷凝器。每当同步电机过励时,它就会提供超前电流并像电容器一样工作。
当同步电容器跨电源电压(并联)连接时,它会吸收超前电流并部分消除无功分量,从而提高功率因数。大型行业一般采用同步调压器来提高功率因数。
优点:- 使用寿命长(将近 25 年)
- 高可靠性
- 功率因数无级调节。
- 不产生维护谐波
- 故障轻松排除
- 不受谐波影响。
- 需要低维护(只需要定期润滑轴承)
- 价格昂贵(维护成本也很高),因此主要由大型电力用户使用。
- 此操作必须使用辅助设备,因为同步电机没有自启动转矩
- 它会产生噪音
3.相位推进器
进相器是一个简单的交流励磁器,它连接在电机的主轴上,与电机的转子电路一起工作,以提高功率因数。工业中用于提高感应电机功率因数的进相器。
由于感应电机的定子绕组使滞后电流与电压相位相差 90°,因此感应电机的功率因数较低。如果励磁安匝由外部交流电源励磁,则励磁电流不会对定子绕组产生影响。因此感应电动机的功率因数将得到改善。这个过程是由阶段推进器完成的。
优点:- 由于励磁安匝以转差频率 (fs) 提供,因此电机消耗的滞后 kVAR(功率或无功功率的无功分量)被充分降低。
- 在不能使用同步电机的情况下,可以轻松使用相位超前器
- 对于低于 200 H.P. 的电机,使用相位提前器是不经济的。 (约 150kW)
单相和三相星形和三角形连接的功率因数改进
通过在 (1) 中连接电容器组来改善三相系统的功率因数。三角连接 (2)。星联)-
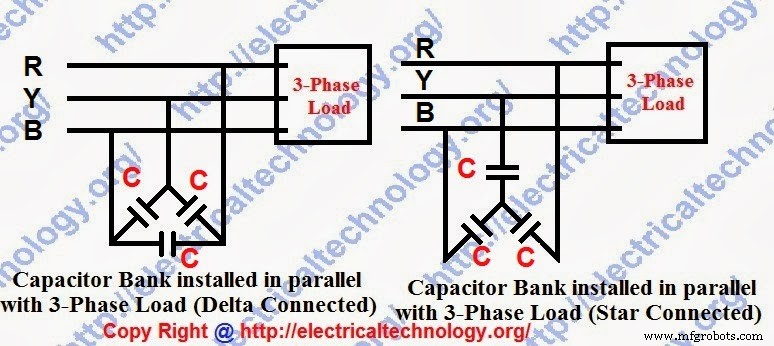
- 单相和三相星三角连接的功率因数改善
你也可以阅读;
- 功率因数
- 主动、被动、表观和复杂的力量。用公式简单解释。
- 功率因数低的原因
- 低功率因数的缺点
- 功率因数改善和校正的优势
- 如何以法拉和 kVAR 为单位计算合适的电容器尺寸以提高功率因数(最简单的方法)
- 如何将电容法拉转换为 kVAR,反之亦然(用于提高功率因数)
工业技术