应用控制的液压起重机
组件和用品
 | | × | 1 | |
 | | × | 1 | |
 | | × | 1 | |
| | × | 8 | |
| | × | 8 | |
| | × | 1 | |
| | × | 1 | |
| | × | 1 | |
| | × | 2 | |
| | × | 4 | |
| | × | 2 | |
| | × | 1 | |
关于这个项目
在互联网上只有两种类型的手臂可用,一种是手动控制的液压臂,另一种是使用应用程序或其他东西控制的机器人。这个 项目是两者的结合。
在开始之前,请确保您具备一些 arduino 编码知识。
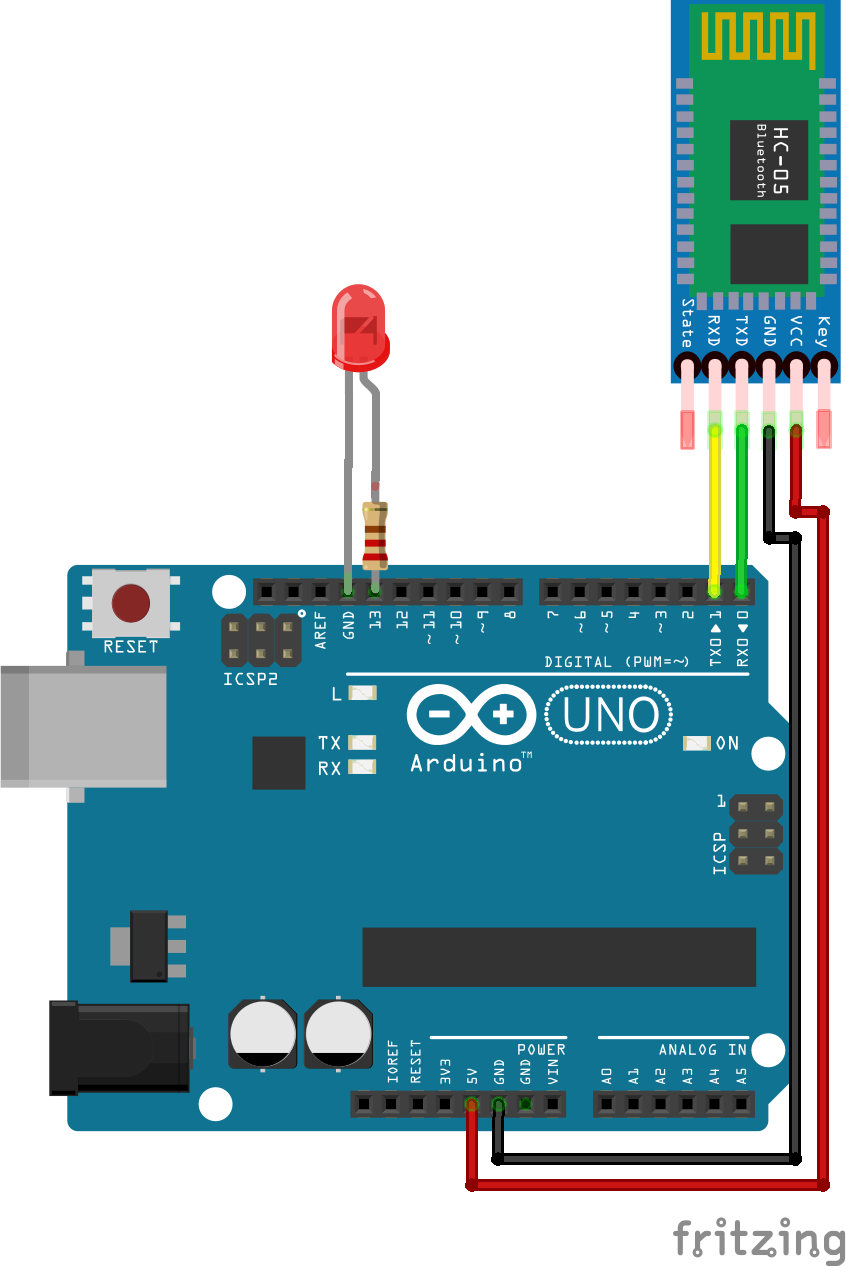
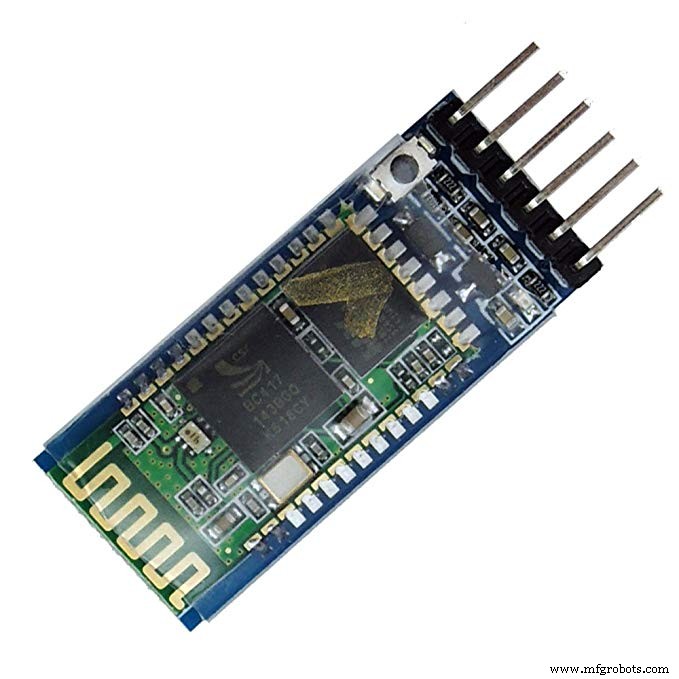
以这种方式将hc05与arduino连接起来。
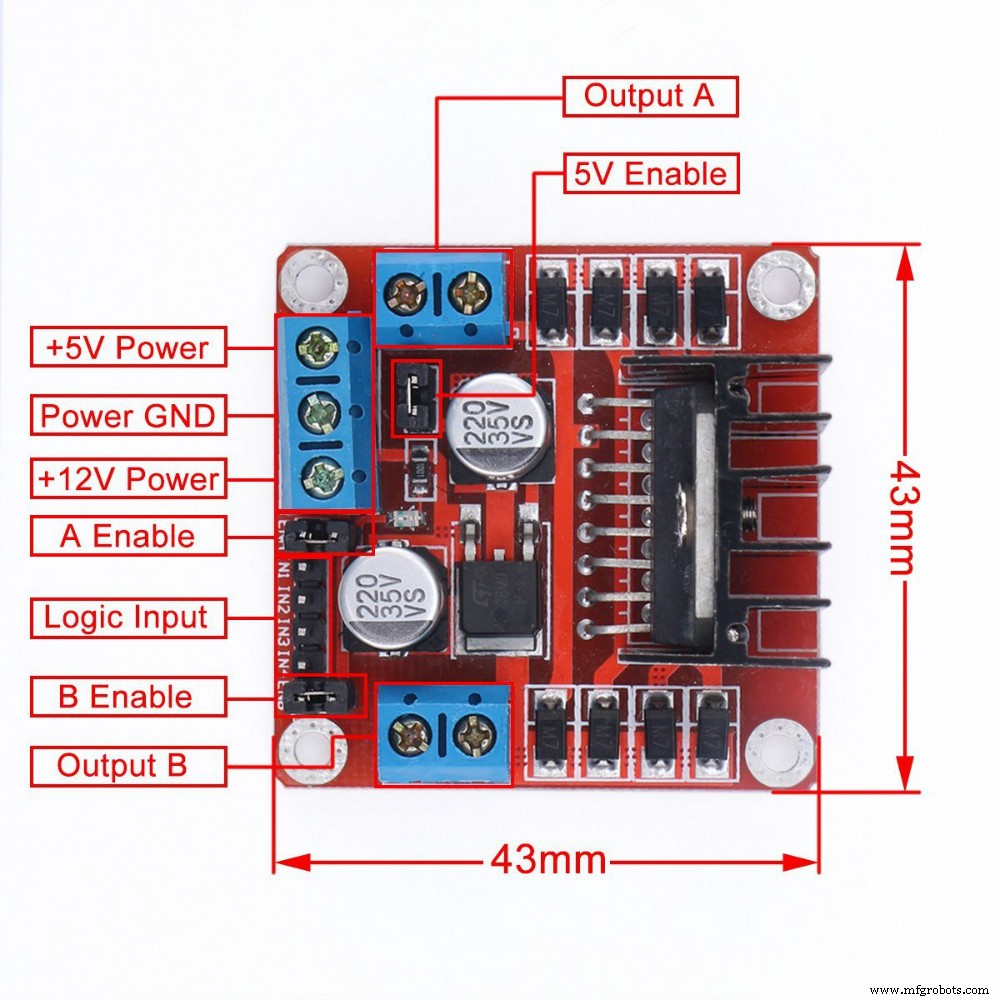
这是l298电机驱动器[ena, in1, in2- motor A], [enb, in3, in4- motor B], ena &enb 用于电机A和电机B的速度控制。
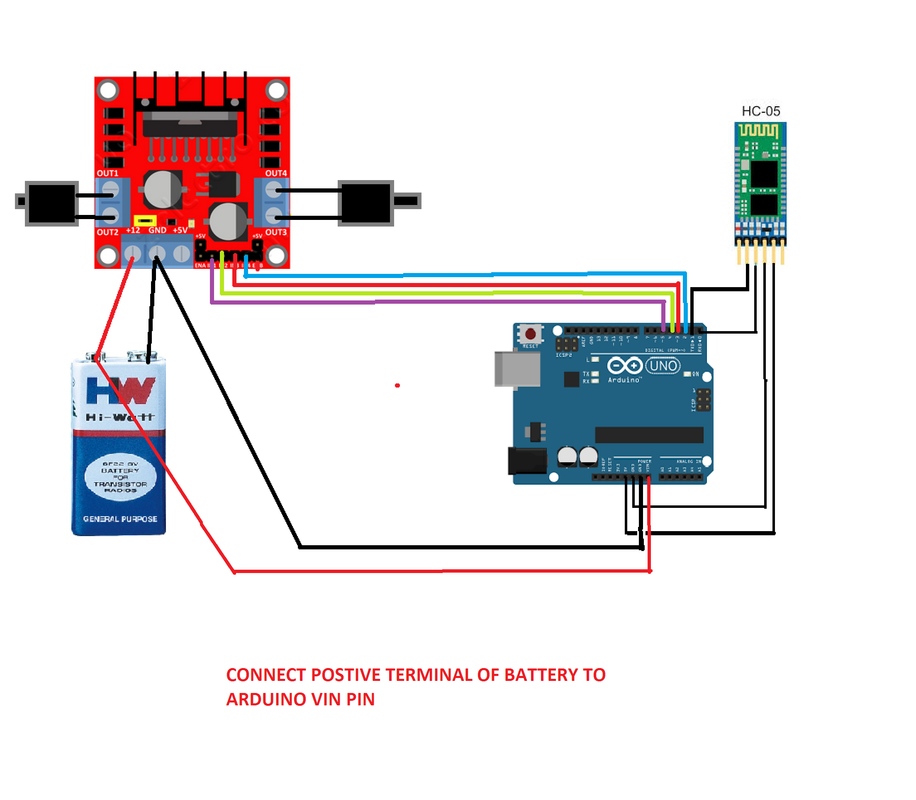
我已经提供了代码的详细解释,按照代码制作电路。在接通电源之前,请确保您已将所有组件正确接地。
代码
hydraulic.inoArduino
// 1st 和 2nd 电机驱动器用于 ARM 控制// 第三个电机驱动器用于 LOCOMOTIVE 部分//1st Motor driver [BASE(2,3) AND SHOULDER(4,7)]int m1IN1 =2; //in1int m1IN2 =3; //in2int m1IN3 =4; //in3int m1IN4 =5; //in4int m1ENA =6; //对于速度控制,这里不使用速度控制,所以在运动时保持高电平,并使其为低电平以停止电机int m1ENB =7; // 对于速度控制,此处不使用速度控制,因此在运动时将其保持为高电平并使其为低电平以停止电机//第二个电机驱动器 [ELBOW(8,9) AND GRIPPER(12,13)]int m2IN1 =8; //in1int m2IN2 =9; //in2int m2IN3 =10; //in3int m2IN4 =11; //in4int m2ENA =12; //对于速度控制,这里不使用速度控制,所以在运动时保持高电平并使其为低电平以停止电机int m2ENB =13; // 用于速度控制,此处不使用速度控制,因此在运动时将其保持为高电平并使其为低电平以停止电机//第三电机驱动器 [CAR (INI,IN2)=RIGHT (IN3,IN4)=LEFT]int m3IN1=14; // in1 14- arduinoint 上的 A0 引脚 m3IN2=15; // in2 15-A1int m3IN3=16; // in3 16-A2int m3IN4=17; // in4 17-A3int m3ENA=18; // ena 18-A4 ,这里你可以使用speed control来控制机车部分的速度,为此你必须使用analogWrite()而不是digitalWrite()int m3ENB=19; // enb 19-A5 ,这里你可以使用速度控制来控制机车部分的速度,为此你必须使用analogWrite()而不是digitalWrite()void setup(){ pinMode(m1IN1,OUTPUT); pinMode(m1IN2,输出); pinMode(m1IN3,OUTPUT); pinMode(m1IN4,输出); pinMode(m2IN1,输出); pinMode(m2IN2,输出); pinMode(m2IN3,输出); pinMode(m2IN4,输出); pinMode(m1ENA,输出); pinMode(m1ENB,输出); pinMode(m2ENA,输出); pinMode(m2ENB,输出); pinMode(m3IN1,输出); pinMode(m3IN2,输出); pinMode(m3IN3,输出); pinMode(m3IN4,输出); pinMode(m3ENA,输出); pinMode(m3ENB,输出); Serial.begin(9600);}void loop(){ char ip='0'; while(Serial.available()>0) // 检查串口是否从 hc05 接收任何值 { ip=Serial.read(); // 从串口读取数据 delay(10); } switch(ip) { case '6' :// 肩膀向上 digitalWrite(m1IN3,HIGH);数字写入(m1IN4,低);数字写入(m1ENA,高);数字写入(m1ENB,高);休息;案例'5'://肩向下数字写入(m1IN3,低);数字写入(m1IN4,高);数字写入(m1ENA,高);数字写入(m1ENB,高);休息;案例'1'://肘部向上数字写入(m2IN3,HIGH);数字写入(m2IN4,低);数字写入(m2ENA,高);数字写入(m2ENB,高);休息;案例'2'://弯头向下digitalWrite(m2IN3,LOW);数字写入(m2IN4,高);数字写入(m2ENA,高);数字写入(m2ENB,高);休息;案例'8':// GRIP合同digitalWrite(m2IN1,HIGH);数字写入(m2IN2,低);数字写入(m2ENA,高);数字写入(m2ENB,高);休息; case '7':// GRIP EXPAND digitalWrite(m2IN1,LOW);数字写入(m2IN2,高);数字写入(m2ENA,高);数字写入(m2ENB,高);休息; case '3':// BASE CLOCK digitalWrite(m1IN1,HIGH);数字写入(m1IN2,低);数字写入(m1ENA,高);数字写入(m1ENB,高);休息; case '4'://BASE ANTICLOCK digitalWrite(m1IN1,LOW);数字写入(m1IN2,高);数字写入(m1ENA,高);数字写入(m1ENB,高);休息; case '9'://OFF digitalWrite(m1IN1,LOW);数字写入(m1IN2,低);数字写入(m1IN3,低);数字写入(m1IN4,低);数字写入(m1ENA,低);数字写入(m1ENB,低);数字写入(m2IN1,低);数字写入(m2IN2,低);数字写入(m2IN3,低);数字写入(m2IN4,低);数字写入(m2ENA,低);数字写入(m2ENB,低);数字写入(m3IN1,低);数字写入(m3IN2,低);数字写入(m3IN3,低);数字写入(m3IN4,低);数字写入(m3ENA,低);数字写入(m3ENB,低);休息; case 'A':// FORWARD digitalWrite(m3IN1,HIGH);数字写入(m3IN2,低);数字写入(m3IN3,高);数字写入(m3IN4,低);数字写入(m3ENA,高);数字写入(m3ENB,高);休息;案例'D'://向后数字写入(m3IN1,低);数字写入(m3IN2,高);数字写入(m3IN3,低);数字写入(m3IN4,高);数字写入(m3ENA,高);数字写入(m3ENB,高);休息;案例'B':// RIGHT digitalWrite(m3IN1,LOW);数字写入(m3IN2,高);数字写入(m3IN3,高);数字写入(m3IN4,低);数字写入(m3ENA,高);数字写入(m3ENB,高);休息; case 'C'://LEFT digitalWrite(m3IN1,HIGH);数字写入(m3IN2,低);数字写入(m3IN3,低);数字写入(m3IN4,高);数字写入(m3ENA,高);数字写入(m3ENB,高);休息; }} 定制零件和外壳
液压起重机_J6NH7RouoB.apkuse m-seal 将螺母与电机相配合。 
 使用 m-seal 将螺母固定在注射器活塞上。
使用 m-seal 将螺母固定在注射器活塞上。  以这些方式固定注射器和电机
以这些方式固定注射器和电机 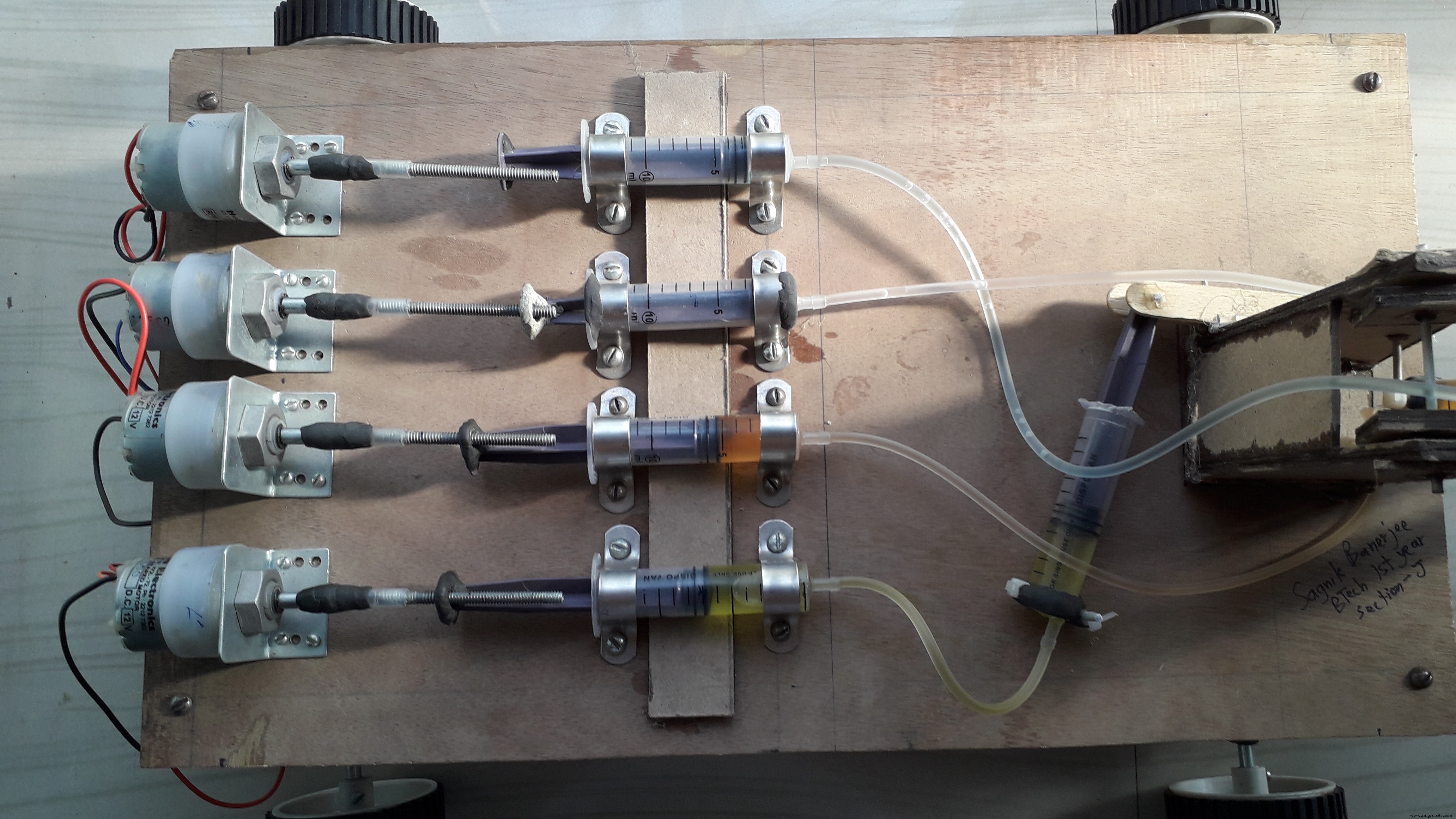 当电机顺时针旋转时推动活塞,逆时针旋转时拉动活塞
当电机顺时针旋转时推动活塞,逆时针旋转时拉动活塞  https://www.youtube.com/watch?v=lhOF6cViZ4Q
https://www.youtube.com/watch?v=lhOF6cViZ4Q 



