

4D 成像雷达芯片组增强物体识别能力
雷达越来越热,尤其是在承诺物体识别/分类和更高纬度分辨率的进步 - 这是传统雷达无法做到的。凭借这些新的创新,雷达正在成为汽车制造商和开发高度自动化汽车的 Tier Ones 中最受欢迎的传感器。
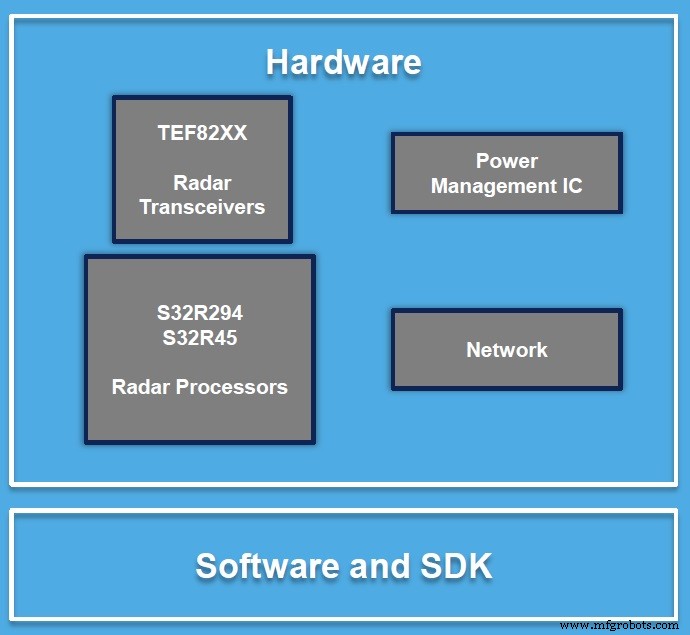
雷达系统解决方案(来源:NXP)
为响应汽车行业的高期望,恩智浦半导体宣布正在提供一套新型雷达传感器芯片组的样品,其中包括该公司的 S32R45 雷达处理器和名为 TEF82xx 的新型 77GHz 收发器。
五年前,恩智浦凭借其首款名为“Dolphin”的雷达芯片开创了 RF CMOS 雷达的先河,成为领先的汽车雷达解决方案供应商。
恩智浦的 4D 成像传感器不仅可以测量距离和速度,还可以测量“高度、方向和到达角度,同时以更高的分辨率识别物体”,射频处理执行副总裁兼总经理 Torsten Lehmann 解释说。对EE Times 的采访 . Lehman 表示,借助不仅可以识别水平面而且还可以识别垂直面的 4D 成像雷达,车辆可以确定是在物体“下方”还是“上方”行驶。
“想象一下当汽车以每小时 80 公里的速度在高速公路上行驶时,一辆摩托车——一个反射率低的小物体——以每小时 200 公里的速度从后面驶来时的场景,”他说。 Lehmann 解释说,与摄像头和激光雷达不同,这些新改进的雷达可以识别最初相距很远的摩托车,并识别这两个物体以两种不同的速度移动。

(来源:恩智浦)
迄今为止,雷达是唯一能够在超过 300 米范围内运行、识别高速运行物体的传感器。相机和激光雷达都无法处理那么远的距离和速度。
随着更高分辨率成像雷达的出现,包括恩智浦在内的许多雷达供应商都渴望将雷达提升为唯一能够在最恶劣的天气和光照条件下工作的高速传感器。
可扩展性
谈论 4D 成像雷达的并不是 NXP 唯一一家。大陆集团去年 9 月宣布,它正在使用赛灵思 FPGA 部署汽车行业首个可量产的 4D 成像雷达,预计将于 2021 年在乘用车上发货。
鉴于恩智浦在 77GHz 射频 CMOS 收发器和 S32R45 雷达处理器方面的批量生产经验,恩智浦声称其 4D 成像雷达芯片组与通用 FPGA 实现相比可以显着降低成本和功率效率。然而,恩智浦没有具体说明成本/功率降低的程度。
VSI Labs 的创始人兼总裁 Phil Magney 告诉我们:“我们多年来一直密切关注这个领域。具有讽刺意味的是,我第一次听说它是在几年前的 NXP 演讲中。当时,它被认为是激光雷达的潜在竞争对手,因为新雷达可以产生点云。”
显然,恩智浦4D成像雷达的发射已经有一段时间了。
但恩智浦的音调正在发生变化。该公司不再仅仅谈论其生成点云的能力,而是现在将重点转移到了一套新的雷达解决方案所提供的可扩展性上。
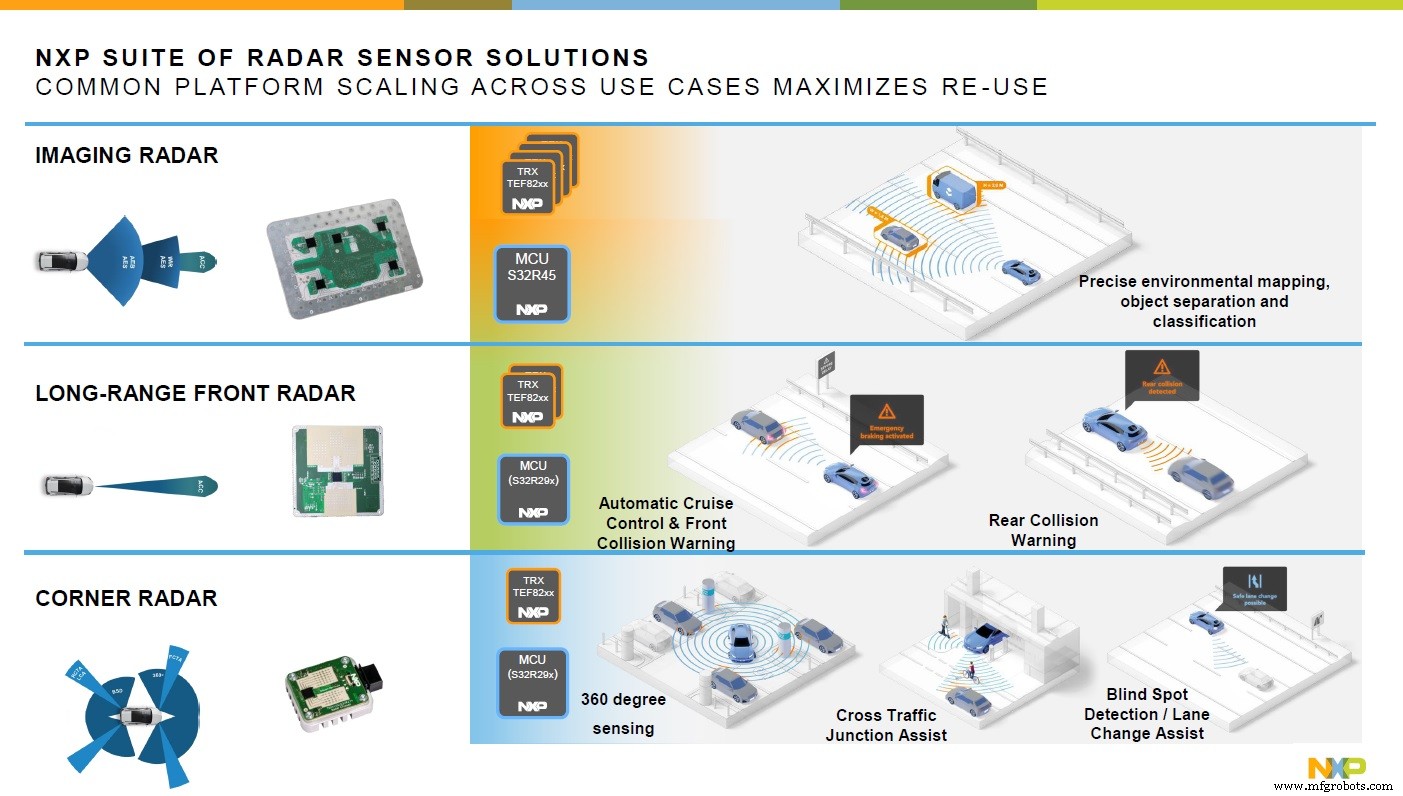
恩智浦现在吹捧“一个可扩展到不同用例的通用平台”,范围从角雷达和远程前端雷达到成像雷达。这对于寻求技术来满足新车评估计划 (NCAP) 要求的行业来说非常重要,该要求要求在盲点和自动紧急制动功能方面具有更好的性能。 Lehmann 解释说,虽然 NCAP 没有指定首选的传感器技术,但汽车制造商 - 迫切需要满足 NCAP 的要求 - 正在购买可以检测角落和前方物体的更好的雷达技术。
点击查看全尺寸图片
(来源:恩智浦)
对于 1 级和 2 级车辆的盲点检测和车道辅助,恩智浦的单个 TEF82xx 收发器和 S32R45 雷达处理器的组合起作用。为 L2 和 L3 汽车添加自动巡航控制和前后碰撞警告将需要两个收发器而不是一个。对于 L4 和 L5 自动驾驶汽车要求的物体分离和分类,OEM 可以将四个级联收发器与一个雷达处理器结合起来。
关键在于,在向更高自动化程度的过渡过程中,必须应对不同品牌和型号的汽车制造商应该能够使用旨在重复使用软件和硬件的单一平台。
过渡到 4D 成像雷达
然而,汽车雷达的发展却被营销术语搞得一团糟。
传统雷达(有时称为 2D)转变为成像雷达。 “成像雷达本质上创建了一个阵列,由此测量密度急剧增加,”马格尼解释说。 “相比之下,传统的 2D 雷达比较粗糙,每个物体只能产生一个点。但是成像雷达会产生许多点,以更好地了解正在跟踪的内容。”总而言之,他指出,“成像雷达产生垂直分辨率,而传统雷达在单个平面上工作。”
那么3D和4D成像雷达有什么不同呢?
“我认为时间被用于第四维度。我也从其他几家公司那里听说过,这就是他们使用它的方式,” Magney 指出。但他补充说:“老实说,4D 比其他任何东西都更具营销炒作,因为时间元素来自多普勒。所以,如果真是这样,那么传统的 2D 就可以称为 3D。”
换句话说,时间因素对于雷达提供的功能一直至关重要。在被问到同样的问题时,恩智浦的雷曼兄弟指出,4D 成像传感器的第四个要素是“横向分辨率”。 4D成像雷达更好地掌握环境,确定车辆是否可以在物体下方或上方飞行。
纬度分辨率
Magney 指出,“更高的纬度分辨率”意味着更高的垂直分辨率。 “这本身就是更重要的功能之一。”
这个讨论唤起了约书亚布朗案。 2016 年 5 月,布朗的特斯拉 Model S 轿车在佛罗里达州的美国 27A 号高速公路上与一辆横穿他路径的拖拉机拖车相撞,导致司机死亡。据广泛报道,配备摄像头和传统 2D 雷达的特斯拉假设汽车可以在巨大的钻机,然后直接驶入其中。

图为半挂车右侧。红色椭圆形区域突出显示 Joshua Brown 的 Tesla S. 碰撞损坏。(来源:国家运输安全委员会)
4D 成像传感器能否避免此类致命事故? Magney 说:“是的,这种类型的雷达不会容易出现来自传统雷达的误报。它不会允许发生特斯拉事故。”
更高性能的收发器和雷达处理
恩智浦全新的 TEF82xx – 75mm x 75mm – 基于其基于 40nm 工艺技术的第二代 RFCMOS。该公司声称与之前的版本相比,它可以将射频性能提高一倍,以增强传感。
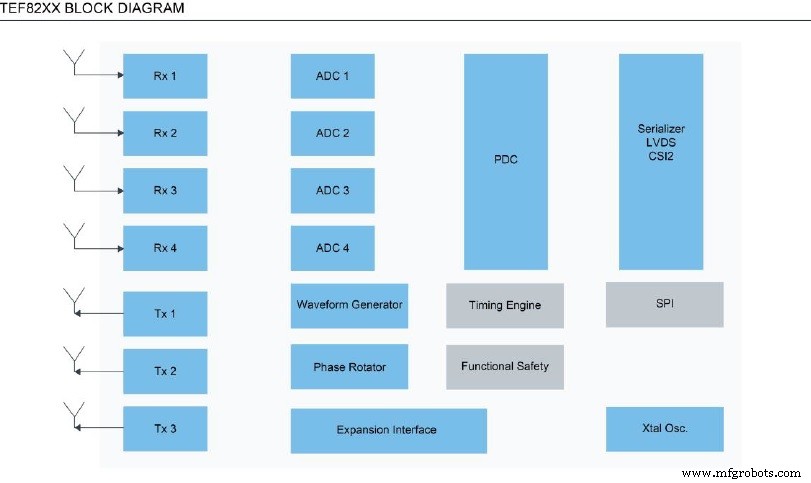
新的收发器芯片还在目标周围提供 4X 相位噪声降低,从而可以提供更好的对象分离。它带有一个用于波束控制应用和高级调制 MIMO 支持的 6 位相位旋转器。
恩智浦的新型 S32R45 雷达采用 16 纳米 FinFET 工艺。该公司声称,它为 L4 和 L5 车辆中的“精确环境映射和增强的场景理解”提供高达 4X 级联收发器支持。
点击查看全尺寸图片
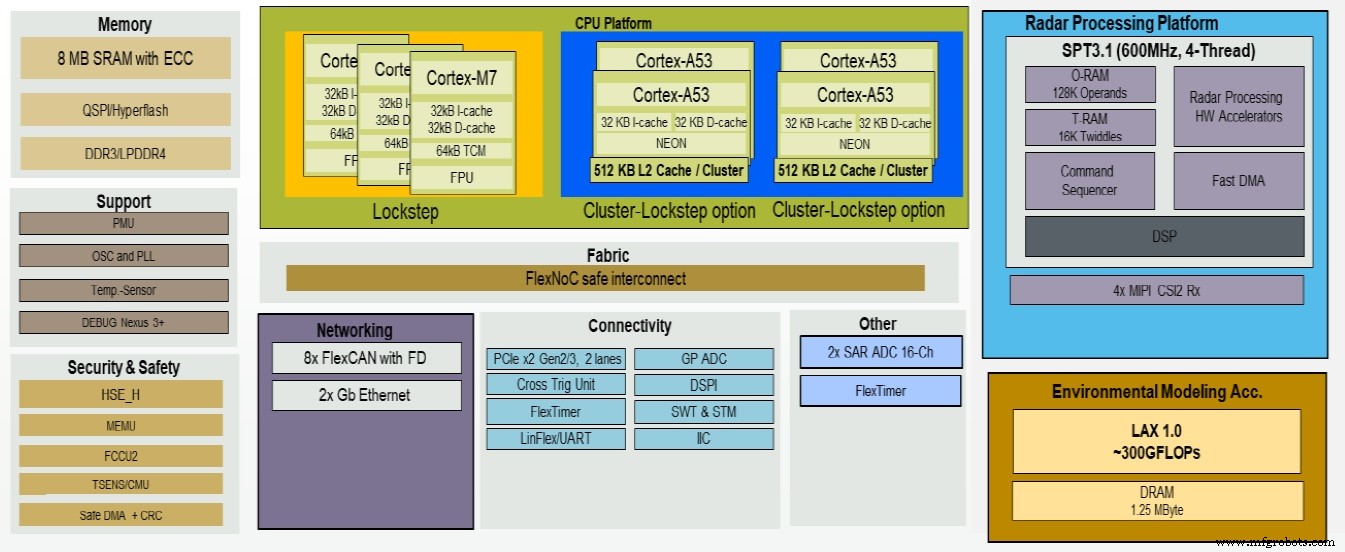
S32R45 框图。 (来源:恩智浦)
需要注意的是,S32R45 能够实现新颖的雷达加速。据恩智浦称,更具体地说,它提供了新的“线性代数雷达加速器”,与 ARM A53 内核相比,性能最高可达 64 倍。恩智浦声称,这意味着即使在恶劣的天气条件下也能运行“超分辨率到达方向 (DoA) 算法和真正的 MIMO 操作”。
重新辩论:激光雷达与雷达
恩智浦声称其新型 4D 成像雷达提供低于 1 度的角分辨率。但它与激光雷达相比如何?
Lehman 指出,“如果你谈论的是高性能激光雷达——比如 Waymo 使用的机械旋转类型,它可以产生很多颗粒状的点云,因为它提供低于 0.1° 或 0.5° 的角分辨率。”他补充说,但这样的激光雷达“体积庞大,成本高达数千美元。”
Magney 观察到,“有传言称,特斯拉正在考虑为 Model 3 平台提供成像雷达,这将是一个很好的举措,因为它为不使用激光雷达提供了更好的答案。”据EE Times报道,System Plus Consulting 的拆解显示特斯拉使用了大陆集团的 2D 雷达 .
然而,根据 Magney 的说法,特斯拉已经从大陆转向博世以获得更大的续航里程。他解释说,这些都是二维雷达,具有传统雷达的局限性。 “就我而言,特斯拉转向成像雷达是明智之举。了解成像雷达会产生点云。尽管它的分辨率低于激光雷达,[仍然] 它比传统雷达有了巨大的改进,” Magney 说。
不过,总而言之,Magney 强调说,“我还没有打算将激光雷达扔到公交车底下。”
在他看来,激光雷达现在比雷达具有巨大的优势,尽管这种差距可能会随着新雷达的出现而缩小。 “激光雷达的一个关键应用是它能够针对底图执行相对定位。这对于城市机器人出租车和穿梭巴士至关重要,我认为您无法取代激光雷达来完成这项任务。”
Magney 总结道:“即使 4D 雷达出现,激光雷达也不会消失。与其取代激光雷达,不如说新雷达克服了传统雷达的一些局限性。”
可用性
雷曼表示,恩智浦的新型雷达芯片组今天提供样品,将于 2021 年量产。角雷达、前雷达和 4D 成像雷达将在 2021 年的几个月内发布,但三者都将在下半年上市。他拒绝就定价发表评论。
>> 本文最初发表于我们的姊妹网站 EE Times。
嵌入式