

具有拉伸增强防水性的飞秒激光制造弹性超疏水表面
摘要
由于其广泛的应用前景,高度可拉伸和坚固的超疏水表面引起了极大的兴趣。在这项工作中,选择有机硅弹性体通过飞秒激光纹理化方法制造超疏水表面,并成功证明了超疏水表面的高拉伸性和可调粘附性。据我们所知,这是第一次通过简单的激光烧蚀制造可承受应变高达 400% 的柔性超疏水表面。测试还表明,该菌株不会导致拒水性下降,而是增强了超疏水表面。此外,激光纹理表面从“花瓣”状态到“莲花”状态的拉伸诱导转变也通过液滴的无损失传输得到证实。我们的研究结果表明,飞秒激光烧蚀有机硅弹性体可能是制造具有高拉伸性、可调粘附性、坚固性和非氟化等明显优点的超疏水表面的有前途的方法,这对于微流体、生物医学和液体排斥皮肤有潜在的用途。
背景
人造超疏水表面在各种应用中发挥着重要作用,例如减阻 [1]、抗生物污垢 [2]、微流体操作 [3]、防冰 [4,5,6]、集水 [7]、和可穿戴电子产品[8]。对于用于人造皮肤和可穿戴电子产品的有前途的超疏水表面,高度可拉伸性、耐用性、生物安全性和易于制造是非常必要的,因此正确选择基板材料和制造方法至关重要。
获得高拉伸性的一种方法是在弹性材料上制造超疏水表面。例如,3D 皱纹模板通常用于将设计的图案转移到具有低表面能的弹性体上 [9]。然而,纳米结构的忠实复制仍然是一项艰巨的挑战,因为在模板的纳米结构中固化的弹性体在剥离过程中往往会断裂或变形。在最近的研究中,报道了通过在预拉伸的弹性材料上沉积疏水微/纳米颗粒制造的可拉伸超疏水表面 [10, 11];通过这种方式,超疏水表面即使在 500% 的拉伸比下也能保持防水性能。但其制作工艺复杂、耗时,且挥发性有机物的使用不符合绿色制造的要求。
为了在刚性或柔性基板上生成分层微/纳米结构,飞秒激光加工/纹理化是一种简单有效的方法,已被用于各种应用 [12,13,14,15,16]。凭借冷加工的特性,该技术已被证明是制备低熔点柔性超疏水表面的合适方法[17,18,19]。以往的研究主要集中在聚四氟乙烯 (PTFE) 和聚二甲基硅氧烷 (PDMS) 的织构上 [20, 21]。然而,PTFE的拉伸变形是不可逆的[22],而PDMS相对较低的弹性模量限制了其超疏水表面的拉伸性低于100%[21]。
Ecoflex 是一种超柔软的柔性基材,可拉伸至 500%,并表现出与人体皮肤良好的机械顺应性 [23, 24]。此外,这种对人体无害的环保弹性体已广泛应用于可穿戴设备[25],因此将其用作激光纹理基材可能是制造高度可拉伸的超疏水表面的解决方案。因此,在本研究中,首次通过 Ecoflex 弹性体的飞秒激光纹理制造了具有可控周期性结构的高度可拉伸、耐用且非氟化的超疏水表面。使用不同的激光加工参数,可以调节微/纳米结构以确定有机硅弹性体的初始润湿行为。研究了润湿行为与应变的关系。展示了可承受应变高达 400% 的柔性超疏水表面。机械拉伸试验还表明,超疏水表面具有拉伸增强的拒水性。同时讨论了相关机制。
方法与实验
材料
柔性橡胶(Ecoflex 00-20)购自美国Smooth-On公司。
有机硅弹性体的制备
如图 1a 所示,通过将液体组分 A 和 B 以 1:1 的体积比混合并在室温下在模具中完全固化 12 h 制备厚度为 2 mm 的柔性橡胶 [23] .
<图片>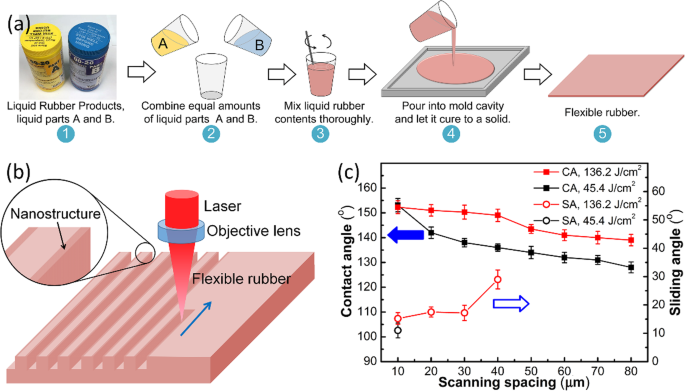
一 固体 Ecoflex 橡胶的制造工艺。 b 示意图器件配置和制造过程。 c 激光加工参数对CAs和SAs的影响
弹性超疏水表面的制造
通过在空气中逐行扫描的飞秒激光烧蚀制造有机硅弹性体上的微/纳米级分层结构(图 1b)。将硅橡胶安装在纳米技术载物台(XY-Tripod-Theta 6 Axis System,Alio Industries)上,然后用 Ti:蓝宝石飞秒激光系统(LIBRA,Conherent Inc.,CA,USA)照射脉冲宽度为 100 fs 在 1 kHz 脉冲重复频率和 800 nm 中心波长下。高斯激光束由数值孔径(NA)为0.24的物镜(× 10,Nikon,Japan)聚焦,激光扫描速度固定为2 mm/s。通过改变扫描间距和激光能量密度,优化了超疏水表面的加工参数。
特征化
使用扫描电子显微镜(SEM,JEOL JSM-7001F)和激光扫描共聚焦显微镜(OLYMPUS,OSL4100)表征激光纹理化有机硅弹性体的表面形态。进行能量色散 X 射线光谱 (EDS) 测量以评估激光烧蚀表面上的化学变化。接触角(CA)和滑动角(SA)采用接触角仪(SEO PHOENIX)测量。
结果与讨论
结构和超疏水特性
各种人造防水表面的润湿模式基于受生物矿物材料启发的表面形态 [26]。模仿荷叶的低粘附 (LA) 超疏水表面具有低于 10°的低滑动角 [27],而源自玫瑰花瓣的高粘附 (HA) 超疏水表面 [28] 具有明显的特征,即水滴在任何有标题的角度。本文采用不同加工参数对弹性体进行激光纹理化制备两种表面形貌[29]。
图 1c 和 2a-c 显示了激光纹理化有机硅弹性体的润湿性能和表面形态。图 1c 中缺失的 SA 数据代表 HA 超疏水表面,SA 为 180°。如图 2 所示,激光烧蚀表面具有典型的微/纳米级层次结构,其中簇状(图 2a)和凹槽状(图 2b、c)微尺度图案是通过去除材料。此外,这些微尺度结构被尺寸为 100-200 nm 的纳米颗粒所覆盖,这是由局部熔融区域中喷射的液体熔体的快速冷却引起的 [30]。此外,EDS 光谱测试表明,由飞秒激光图案化弹性体表面引起的化学变化并不显着(图 2d、e),仅氧含量略有增加。当激光能量密度为 45.4 J/cm 2 扫描间距为10 μm,激光烧蚀表面显示出优异的超疏水性,其中CA为153.1°,SA为11°。随着扫描间距的增加,CA逐渐减小(图1c),即使样品倾斜180°,表面上的液滴也变得不动。当扫描间距增加到 80 μm 时,CA 减小到 128°。当激光能量密度为 136.2 J/cm 2 且扫描间距为80 μm,烧蚀面仍可获得140°以上的CA(CA =141.5°)。
<图片>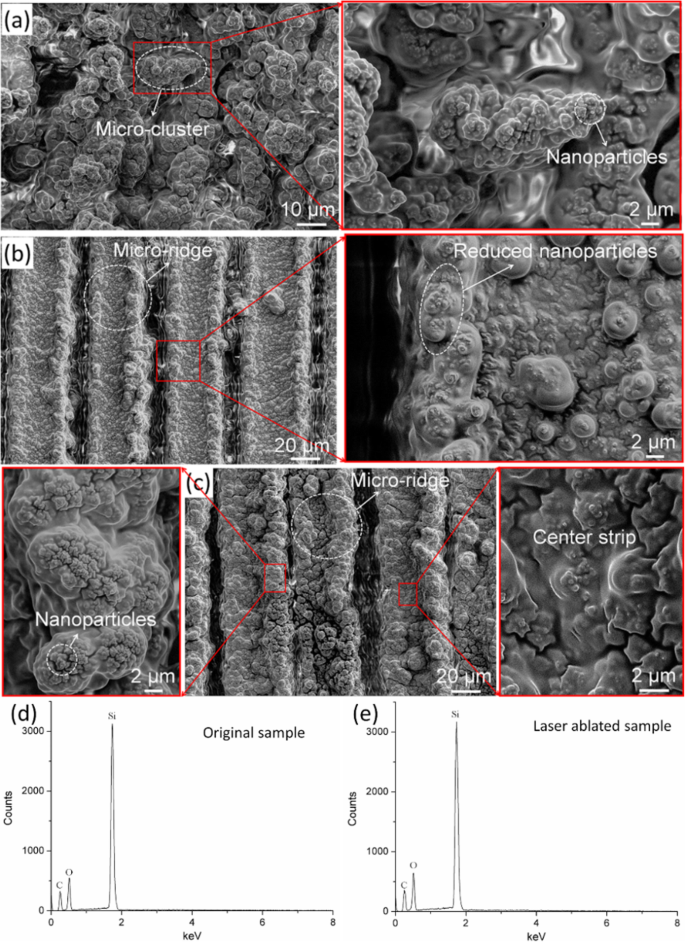
具有不同激光能量密度和扫描间距的飞秒激光诱导粗糙微结构的 SEM 图像。 一 45.4 J/cm 2 , 10 μm。 b 45.4 J/cm 2 , 50 μm。 c 136.2 J/cm 2 , 50 μm。原始样品的 EDS 光谱记录 (d ) 和激光烧蚀样品 (e )
根据图 2 所示的表面形态,表面纹理可分为两部分。一个位于微脊的边缘,呈现出含有丰富纳米颗粒的微尺度凸起结构。纳米结构已被证明是超疏水特性的关键因素 [31];被困在这种结构中的空气层不仅可以防止液滴渗透到凹槽空位中,而且可以实现较小的固/液接触面积,从而导致低附着力。然而,与边缘相比,微脊的中心部分是平坦的并且缺乏纳米结构(图 2c),这导致在固/液界面中完全接触和高附着力。在激光能量密度固定的情况下,微脊上中心平坦部分的宽度由扫描间距决定,因此总粘附力随着扫描间距的增加而增加。因此,考虑到加工效率和样品性能,激光能量密度固定在 136.2 J/cm 2 ,分别选择30 μm和50 μm的间距制备LA和HA超疏水表面。
应变调制结构和润湿性
由于超疏水表面是以逐行扫描的方式制造的,通过在垂直(⊥)和平行(∥)的方向拉伸超疏水表面,研究CA和SA与应变的关系扫描方向。应变值 (ε ) 由方程 ε 定义 =(L − L 0)/L 0,其中 L 和 L 0分别为弹性体在拉伸状态和初始状态下的长度。
图 3a 和 b 显示了拉伸的超疏水弹性体的结构参数作为平行和垂直应变值的函数。当沿平行方向拉动激光纹理试样时,平行应变会压缩光栅并导致周期和凹槽宽度减小(图 3a、c)。同时,微脊的中心带被折叠并被周围的微/纳米结构覆盖(图3e)。细长的微脊在应变为 400% 时形成周期为 20-30 μm 的新层次结构(图 3d),丰富和多样化了表面结构。另一方面,垂直拉伸的作用导致周期和凹槽宽度线性增长,凹槽深度略有减少(图 3b),但微脊的宽度和表面形态几乎保持不变(图 3b)。 3f-h)。微槽底部形成周期约为10 μm的平行结构(图3f)。
<图片>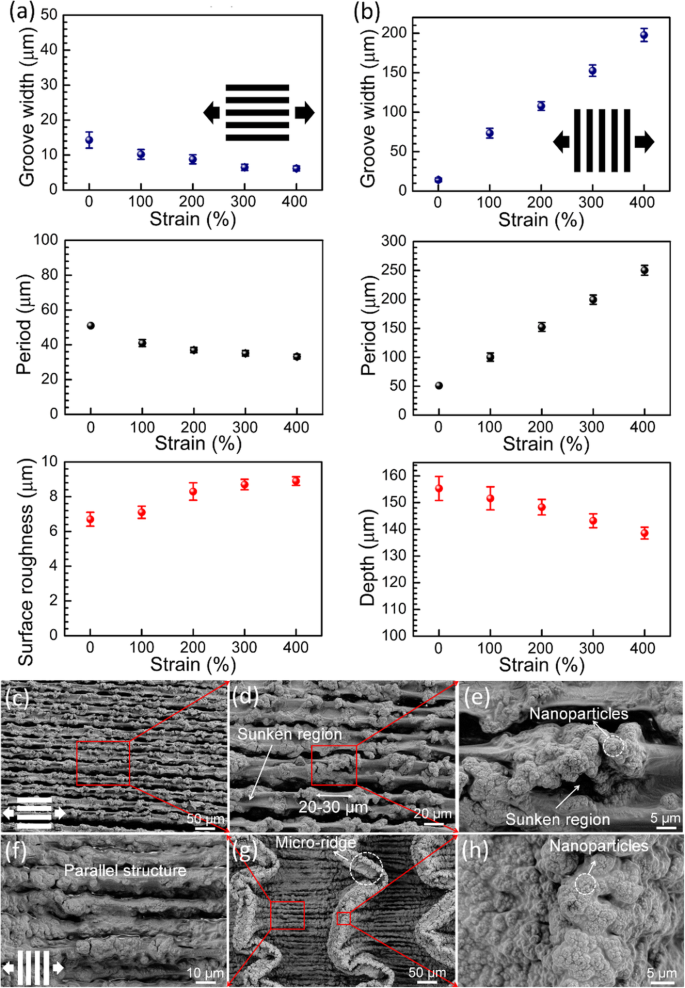
HA 超疏水弹性体的结构参数在 0–400% 应变下沿平行方向拉伸 (a ) 和垂直方向 (b )。 HA 超疏水弹性体在 400% 应变下平行拉伸的表面形貌 (c –e ) 和垂直 (f –h ) 方向
图 4 显示了平行应变和垂直应变对激光烧蚀超疏水表面 CA 和 SA 的影响。随着拉伸应力的增加,对于 LA 和 HA 超疏水表面,超疏水行为都有明显的改善。这一结果与之前的报告 [21, 32] 形成对比,其中机械拉伸导致拒水性下降。特别是对于HA超疏水表面,当应变为100%时,CA为144.4°,即使在颠倒的状态下,水滴也粘在粗糙的表面上(图4b),称为“钉扎状态” 。”随着应变增加到 200%,CA 增加到 150°。同时,水滴以43°的倾斜角滑落,表明润湿状态变为“滚动状态”。当应变达到 400% 时,HA 超疏水表面获得了最优异的超疏水性,CA 为 153.6°,SA 为 12°。当沿垂直方向拉伸试样时,如图 4c、d 所示,对于 LA 和 HA 超疏水表面,CA 和 SA 的变化曲线都与平行拉伸试验中获得的结果相似(图 4)。 4a, b),CA 的增加更线性。 HA超疏水表面的状态变化也发生在应变为200%时,随着应变增加到400%,HA超疏水表面可以获得156.6°的最大CA和9°的最小SA。
<图片>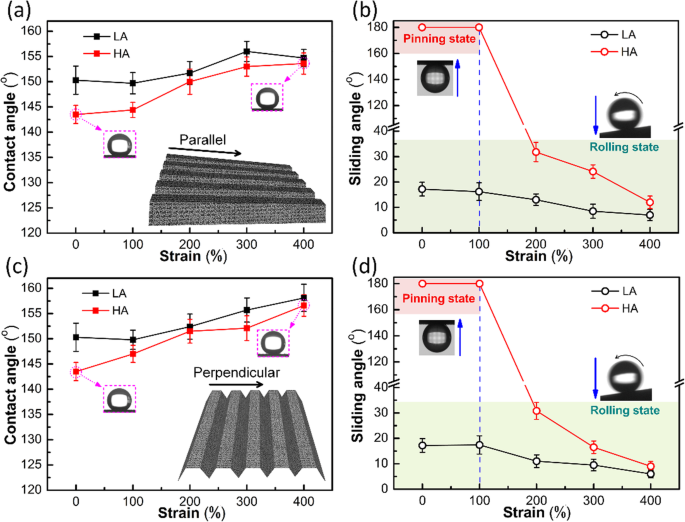
CA (a ) 和 SA (b ) 在不同平行应变值下的超疏水弹性体。 CA (c ) 和 SA (d ) 不同垂直应变值下的表面
拉伸增强防水机制
上述结果表明,在超疏水弹性体沿垂直或平行于激光扫描方向的方向以超过 100% 的应变拉伸后,可以获得增强的超疏水性。对于未经过飞秒激光加工的起始样品,经过 400% 应变拉起后,其表面形貌和超疏水性保持不变(图 5)。并且在拉伸过程中没有发生化学转变,因此增强的润湿行为应归因于表面形貌的变化。
<图片>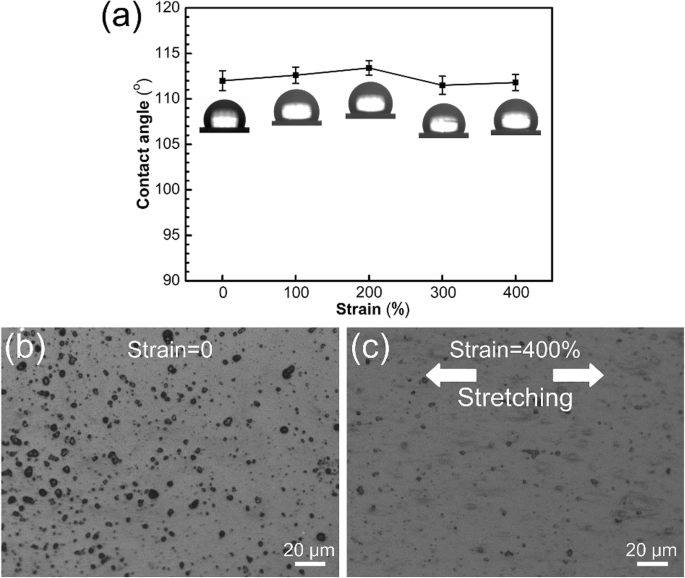
一 原始弹性体在不同应变值下的 CA,以及原始弹性体在应变为 (b ) 0 和 (c ) 400%
在本文中,为了理解拉伸的有机硅弹性体的超疏水性的增加,采用组合状态来解释超疏水性弹性体的润湿性[33]。超疏水弹性体的整个固液相互作用可以用 Cassie-Baxter 模型描述,但微脊上润湿中心区域的相互作用处于 Wenzel 状态。根据空气中的 Cassie-Baxter 模型 [34],CA (θ c) 在气/液/固系统中可表示为以下方程:
$$ \cos {\theta}_{\mathrm{C}}={f}_{\mathrm{S}}\cos {\theta}_{\mathrm{S}}-{f}_{\mathrm {A}} $$ (1)其中 f S 和 f A 是固体/水界面和空气/水界面的分数 (f S + f A =1),分别为θ S 是光滑有机硅弹性体上的理想 CA(对于 Ecoflex 00-20,θ S =112°,图5)。符合Wenzel模型的湿润中心区CA可表示为:
$$ \cos {\theta}_{\mathrm{W}}=r\cos {\theta}_{\mathrm{S}} $$ (2)其中 θ W 是 Wenzel 模型中的 CA,而 r 是表面粗糙度系数,定义为实际表面积与投影面积之比。通过忽略捕获在纳米结构中的气穴,CA (θ )在组合状态下可以用以下近似方程表示[35]:
$$ \cos \theta ={f}_{\mathrm{S}}\left(r\cos {\theta}_{\mathrm{S}}+1\right)-1 $$ (3)根据方程。 2、在Wenzel模型中,r cosθ S 是介于 − 1 和 1 之间的值,因此 (r cos θ S + 1) 在方程中。 3 必须是正值。
图 6 为不同拉伸状态下液滴在超疏水表面的截面示意图。对于松弛的超疏水表面(图 6a),当在垂直方向拉动激光纹理样品时,单个微脊的固/液接触面积几乎保持不变(图 3g、h 和 6b),这意味着r 在方程式中3 保持不变,但整个固/水界面的分数 (f S) 继续减小,导致θ增加 .此外,增加的 CA 和凹槽宽度(图 3b 和 6a)都减少了与液滴接触的微脊的数量,这导致总粘附力的降低。对于倾斜的 HA 超疏水表面,如果粘附力下降到小于重力切线的值,液滴就会从超疏水表面滑落。对于平行拉伸,微脊的表面积和凹槽的宽度均减小(图 6c),表明固/水界面的分数(f S) 几乎保持一致。然而,由于微脊中心的凹陷区域(图 3e 和 6c)和沿拉伸方向出现的分层结构(图 3d),表面粗糙度因子(r ) 增加,从而导致 θ 的增加 .单个微脊的固/液接触面积显着减少也会导致粘附力减弱,这有助于HA超疏水表面从“钉扎状态”到“滚动状态”的转变。
<图片>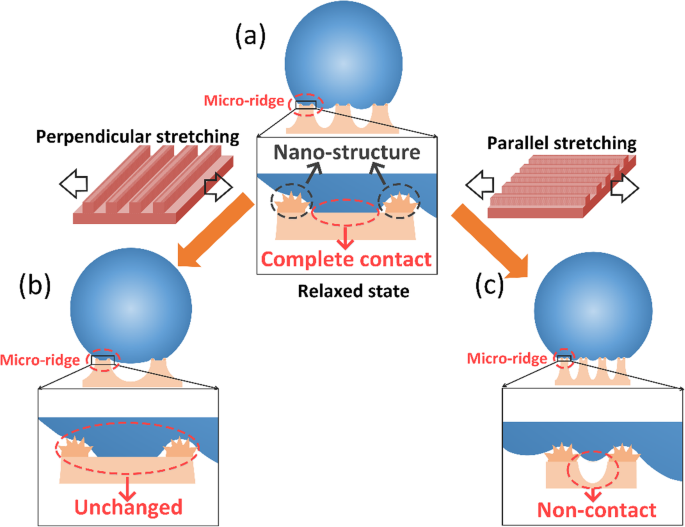
(a的横截面示意图 ) 松弛样本,以及在 (b ) 垂直方向和 (c) 平行方向
耐用性
高度可拉伸的超疏水表面的耐久性是实际应用中的一个重要参数。图 7a 显示了如何测试耐久性。将超疏水弹性体一次又一次地卷起、揉捏和扭曲,然后进行测量。对于 LA 超疏水弹性体,在 50 圈变形后,弹性体仍能将水射流完全反弹到表面,这表明粗糙表面具有令人满意的稳定性。对于 HA 超疏水弹性体,在平行(图 7b)和垂直(图 7c)两个方向进行了 300% 应变下的拉伸松弛循环测试,并在 10周期间隔。在50 次拉伸-松弛循环中,HA超疏水弹性体从“钉扎态”到“滚动态”的动态转变显示出高可逆性和可重复性。
<图片>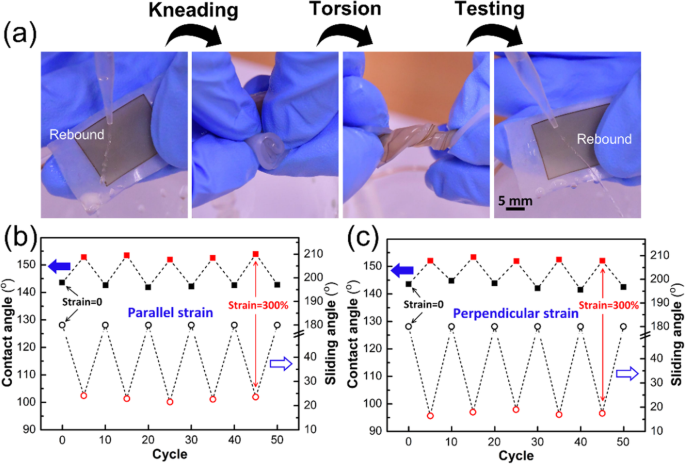
一 在(b ) 并行和 (c ) HA 超疏水弹性体的垂直方向
液滴运输
当简单的机械拉伸和松弛交替应用于 HA 超疏水表面时,可以很容易地实现从“钉扎状态”到“滚动状态”的可逆和可重复的转变,因此这种类型的表面可以有效和安全地运输微小的物体。液滴,特别是对于昂贵和稀有的液体样品。运输过程的图示如图 8 所示。体积为 5 μL 的水滴最初放置在 LA 超疏水表面上,并且 HA 超疏水表面从上方接近并与水滴接触。由于HA表面的强附着力,液滴可以被捕获、提升和传输而不会丢失。通过拉伸弹性体,固/液界面之间的粘附力降低,直到液滴上的重力胜出,从而释放液滴。还提供了一个视频(附加文件 1:视频 S1)来演示整个过程。这种简单的机制可以轻松集成到自动化机器人设备中,这对于芯片实验室应用具有重要意义。此外,随着激光技术的快速发展,可以产生功率超过100 W的高频飞秒激光器[36],新的振镜技术可以实现100 m/s以上的扫描速度[37]。因此,基于大功率飞秒激光器和高速振镜,激光制备可拉伸超疏水表面的大规模工业化成为可能。
<图片>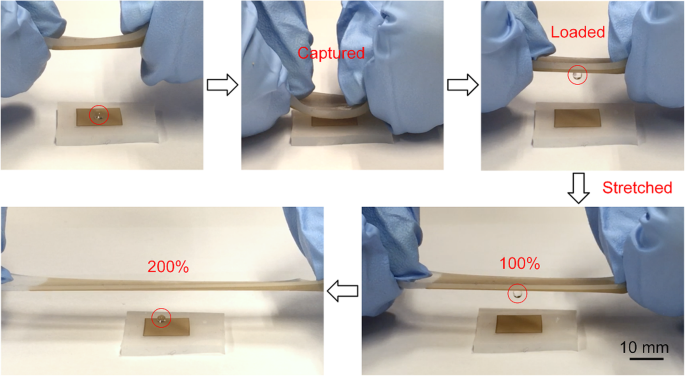
使用可拉伸的HA超疏水弹性体证明无损液滴转移
结论
首次通过飞秒激光纹理在商用有机硅弹性体上成功制造出能够承受超高应变 (400%) 的坚固无氟超疏水表面。基于由激光加工参数确定的可控微/纳米级结构,可以灵活管理初始润湿性能。此外,通过拉伸表面,无论拉伸力向哪个方向施加,超疏水性都不会减弱而是在一定程度上增强。在HA超疏水表面,可以通过拉伸和释放循环捕获和释放液滴。经过多次揉捏和扭转循环后仍能很好地保持表面拒水性,这表明其具有良好的耐久性和非凡的适用性。该工作提出的具有可控超疏水性的高度可拉伸表面在生物医学、微流体和智能可穿戴设备方面具有广阔的应用前景。
数据和材料的可用性
当前研究期间生成和/或分析的数据集可向相应作者索取。
缩写
- CA:
-
接触角
- HA:
-
高附着力
- 洛杉矶:
-
低附着力
- PDMS:
-
聚二甲基硅氧烷
- 聚四氟乙烯:
-
聚四氟乙烯
- SA:
-
滑动角度
纳米材料
- 水射流与激光切割:有何不同?
- 带有 t cobbler plus 的 Raspberry pi 2 水报警器
- Mantech 激光机随附的 Lightburn 激光软件
- 基于带 AgNWs 电极的纹理表面的 PEDOT:PSS/n-Si 太阳能电池的高性能
- 5-氟尿嘧啶封装 Ethosomes 联合 CO2 点阵激光治疗增生性瘢痕的实验研究
- 通过与 Pt 纳米粒子表面等离子体耦合显着增强 MgZnO 金属-半导体-金属光电探测器
- 使用全碳 3D 纳滤膜去除水中的抗生素
- 与 Talbot 腔集成的锥形量子级联激光阵列
- 一种简单的激光烧蚀辅助方法,用于在聚四氟乙烯薄膜上制造超疏水 SERS 基板
- 由膜表面上石墨烯片的布朗运动和非布朗运动引起的纳米水泵
- 如何使用曲面加工复杂几何形状
- 使用激光雕刻的常见表面