

ROBOTRIM 葡萄藤自动修剪系统
越来越多的行业通过使用新技术实现流程自动化和数字化 .这也发生在农业食品领域 更具体地说,在农业领域,传统机械结合了基于新技术的设备:定位、质量检查、作物管理等。

目标是提高生产力 农业区,降低生产成本 ,提高产品质量 最重要的是,改善人们的工作条件 .因此,对这类技术的投资正在增加。
当前的趋势之一是改进和设计新机器,以实现迄今为止手动执行的流程自动化。
在此框架内,ATRIA 参与了葡萄藤自动修剪系统的开发 命名为 ROBOTRIM 而今天我们将告诉你更多细节。
什么是 ROBOTRIM?
ROBOTRIM 旨在自动进行葡萄藤的修剪。这既包括其通过藤蔓延伸的自主循环,也包括执行剪枝以自动进行修剪。
修剪是在冬天进行的,包括用特定的标准切割葡萄藤的树枝,以防止它不受控制地生长。目前,它是由使用剪刀进行切割的人员手动完成的,通常是气动的。
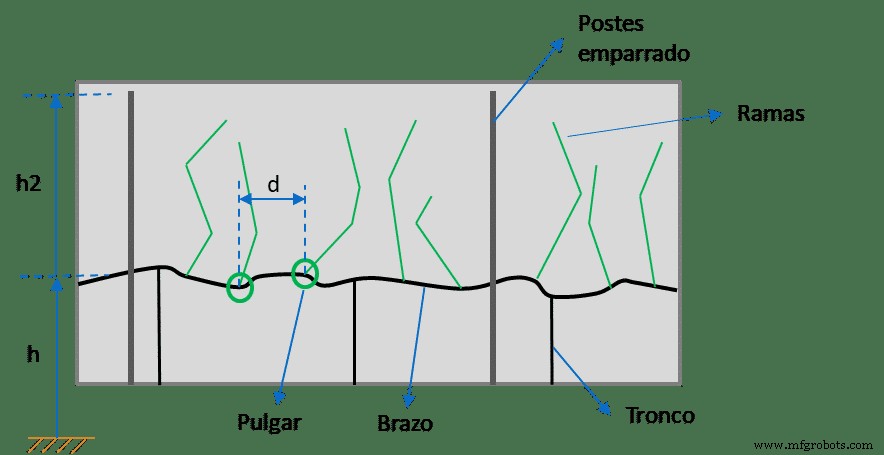
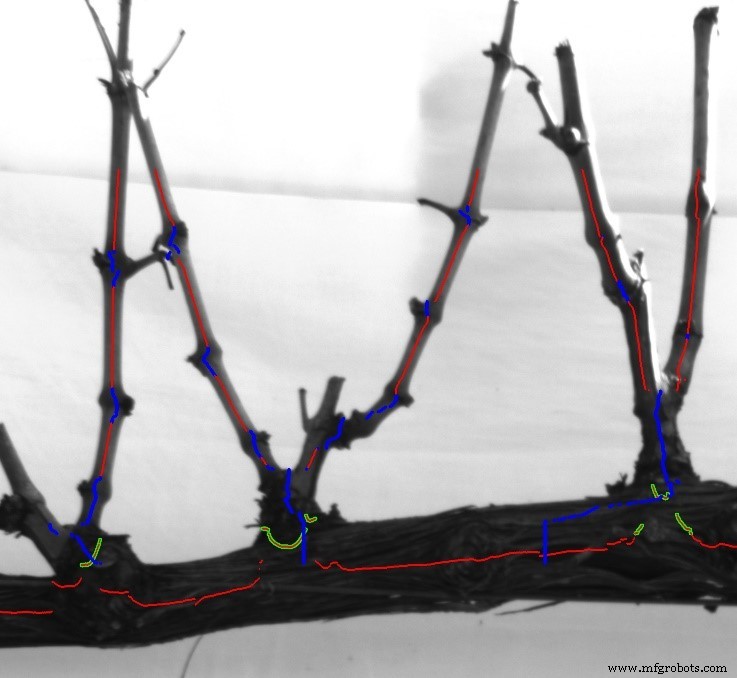
ROBOTRIM底盘,设计成拱形,插在藤蔓的两侧,留在中间,沿着它移动。该设备具有由 ATRIA 开发的视觉系统,该系统使用图像处理进行检测 算法,每种藤蔓的切点。
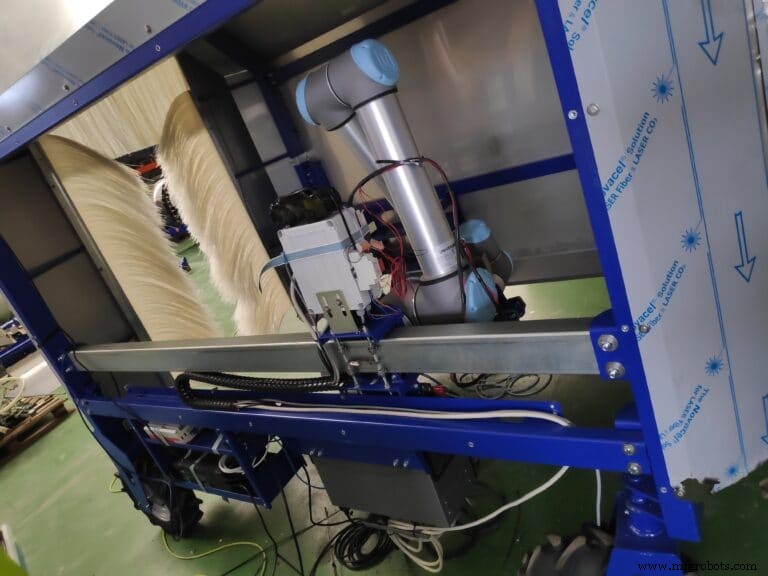
用于切割的剪刀放置在机械臂的末端 ,它足够大,可以到达发现藤蔓的不同位置。这样,它就可以精确地切割混凝土树枝。
视觉系统以 3D 形式定位切割点,并将坐标发送到机械臂,机械臂根据该信息进行定位以执行切割。为此,两个团队必须相互完美校准。
此外,该系统还有一组电池和电机,可使其自主运动。
项目开发框架
该项目是在全国范围内内政部的 AEI 呼叫计划的框架内开发的。此次电话会议的目的是提高中小企业的竞争力,促进不同行业的数字化。
该项目已与以下合作伙伴进行。首先,FEMAC ,是加泰罗尼亚的农业生产工具集群,负责项目的管理和传播。 Grupo Cordorniu ,西班牙最著名的葡萄种植集团之一,已向其他合作伙伴提供有关修剪过程和进行现场测试的方法的知识。另一方面,TEYME ,一家专业生产农业机械的公司,做了系统底盘的设计。 Vernis Motors 提供了允许团队移动的电机和电池。
您想在您的任何项目中应用具有人工视觉的机器人吗? 联系我们!
自动化控制系统