

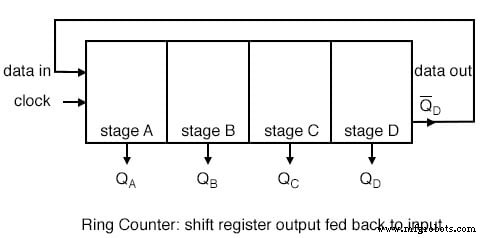
环形计数器
如果移位寄存器的输出反馈到输入。环形计数器结果。只要施加时钟脉冲,移位寄存器中包含的数据模式就会重新循环。
例如,数据模式将在下图中每四个时钟脉冲重复一次。但是,我们必须加载数据模式。
全部 0 's 或所有 1 's 不算。这种情况下的连续逻辑电平有用吗?
我们为将数据加载到下面配置为环形计数器的并行输入/串行输出移位寄存器做了准备。
可以加载任何随机模式。最常用的模式是单个 1 .
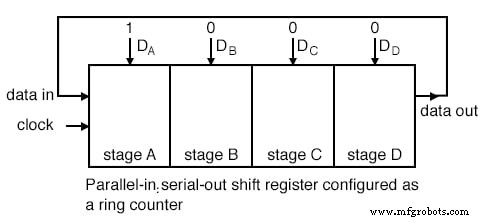
加载二进制1000 进入环形计数器,上面,在移位之前产生一个可见的模式。
在我们的 4 级示例中,单级的数据模式每四个时钟脉冲重复一次。
所有四个阶段的波形看起来都一样,只是从一个阶段到下一个阶段有一个时钟时间延迟。见下图。
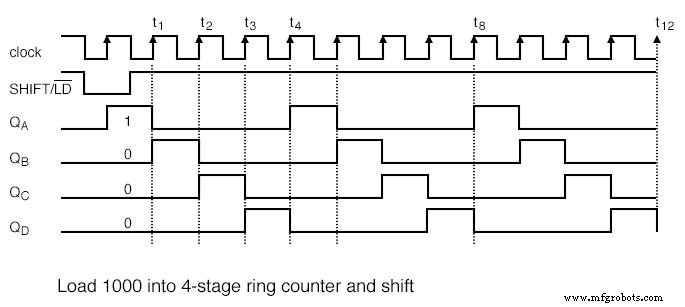
上面的电路是除以4 柜台。将时钟输入与任一输出进行比较,显示频率比为 4:1。
问:除以 10 的环形计数器需要多少级?
A:十级将循环1 每 10 时钟脉冲。
将环形计数器初始化为 1000 的另一种方法 如上所示。移位波形与上述相同,每四个时钟脉冲重复一次。
需要初始化是环形计数器相对于传统计数器的一个缺点。
至少,它必须在上电时初始化,因为无法预测触发器将在何种状态下上电。
理论上,不再需要初始化。在实际操作中,触发器最终可能会被噪声破坏,破坏数据模式。
“自校正”计数器,如传统的同步二进制计数器会更可靠。
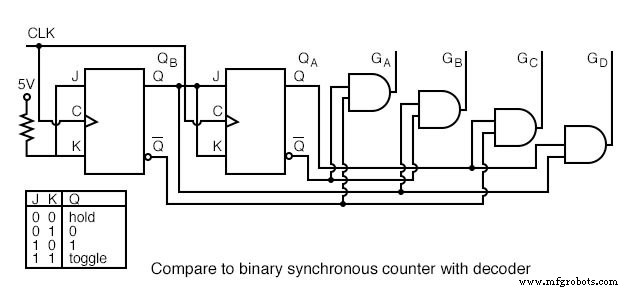
上述二进制同步计数器只需要两级,但需要解码器门。
环形计数器有更多的阶段,但是是自解码的,省去了上面的解码门。
环形计数器的另一个缺点是它不能“自启动”。
如果我们需要解码输出,环形计数器看起来很有吸引力,特别是如果大部分逻辑都在单个移位寄存器封装中。如果没有,传统的二进制计数器在没有解码器的情况下就不那么复杂了。
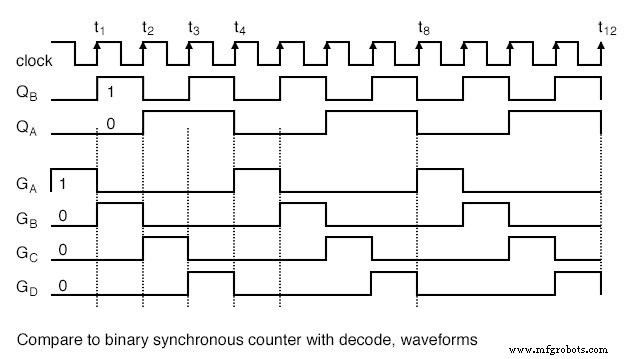
同步二进制计数器解码的波形与之前的环形计数器波形相同。
计数器序列为 (QA QB) =(00 01 10 11 ).
约翰逊计数器
开关尾环计数器 ,也称为约翰逊计数器 ,克服了环形计数器的一些局限性。
就像环形计数器一样,约翰逊计数器是一个对其自身进行反馈的移位寄存器。对于给定的分频比,它需要可比环形计数器的一半级。
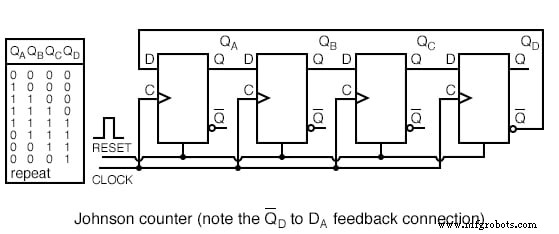
如果将环形计数器的补码输出而不是真实输出反馈到输入,则会产生约翰逊计数器。
环形计数器和约翰逊计数器的区别在于最后一级的哪个输出被反馈(Q或Q')。
仔细比较下面的反馈连接和之前的环形计数器。
这种“反向”反馈连接对其他类似电路的行为产生了深远的影响。
循环单个 1 围绕环形计数器将输入时钟除以等于级数的因子。
而约翰逊计数器除以等于两倍级数的因子。
例如,一个 4 级环形计数器除以 4 . 4 级约翰逊计数器除以 8 .
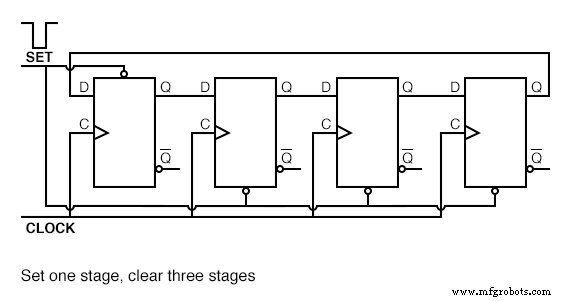
通过将所有阶段清除为 0 来启动约翰逊计数器 s 在第一个时钟之前。这通常在通电时完成。
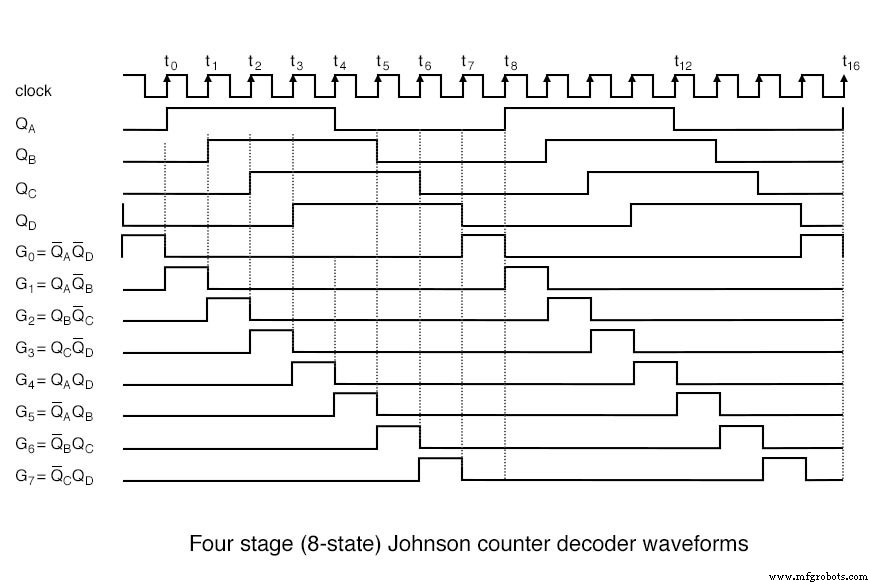
参考下图,第一个时钟移位三个0 来自 ( QA QB QC ) 向右进入 ( QB QC QD )。 1 在 QD' (Q 的补码)被移回 QA .
因此,我们开始移动 1 s 向右,替换 0 s。环形计数器循环一个 1 ,4 级约翰逊计数器循环四个 0 s 然后四个 1 s 表示 8 位模式,然后重复。
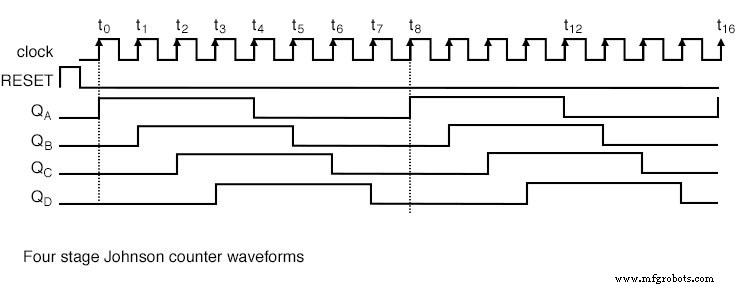
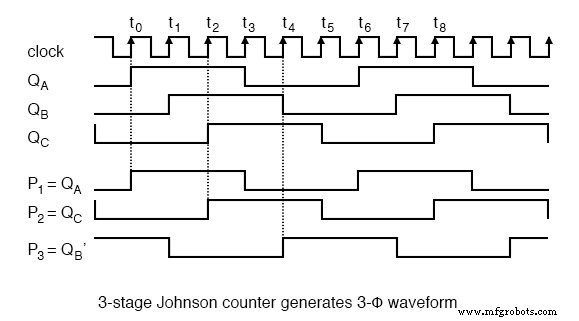
以上波形说明约翰逊计数器产生的多相方波。
上面的 4 级单元产生 50% 占空比的四个重叠阶段。生成一组三相波形需要多少级?
例如,由 360 赫兹时钟驱动的三级约翰逊计数器将产生三个 120 o 60赫兹相位方波。
约翰逊计数器中触发器的输出很容易解码为单一状态。
下面举例来说,4 级约翰逊计数器的 8 个状态由每个状态不超过两个输入门解码。
在我们的示例中,两个输入门中的八个对示例约翰逊计数器的状态进行解码。
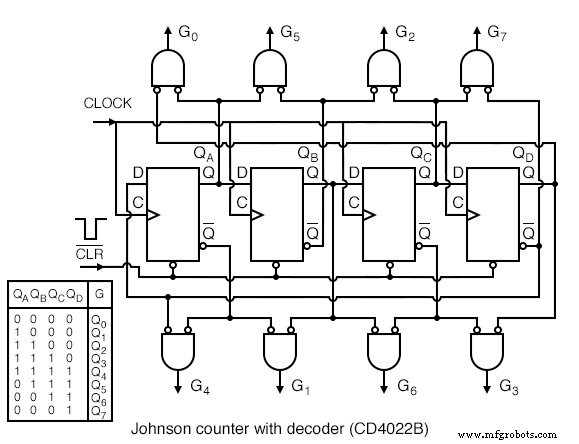
无论约翰逊计数器有多长,都只需要 2 输入解码器门。
请注意,我们本可以对 AND 使用非反相输入 通过在 FF 处将门输入从真变为反相来实现门,Q 到问' ,(反之亦然)。
但是,我们正在努力使上图尽可能与 CD4022B 的数据表相符。
上面,我们的四个相控方波 QA QD 被解码为八个信号 (G0 G7 ) 在一个完整的 8 个时钟周期中的一个时钟周期内有效。
例如,G0 当两个 QA 都处于高电平时 和 QD 低。因此,成对的各种寄存器输出定义了我们约翰逊计数器示例的八个状态中的每一个。
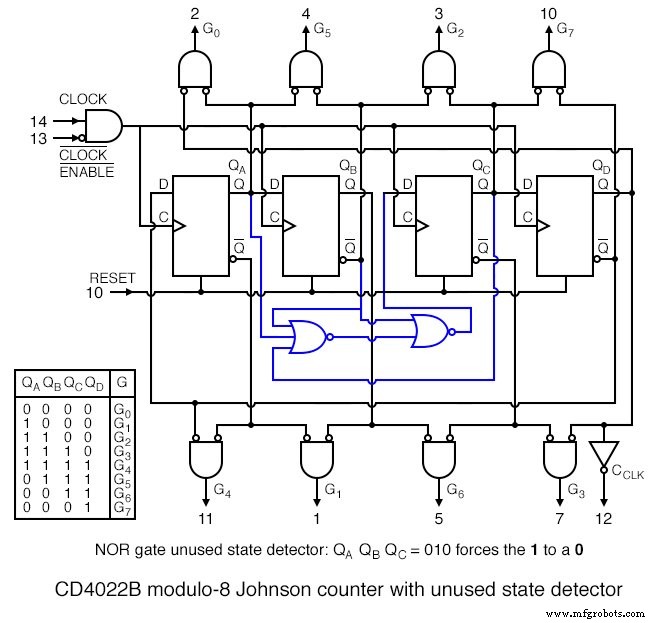
以上是CD4022B约翰逊计数器更完整的内部图。请参阅制造商的数据表了解省略的次要细节。
与之前的图相比,图中新增的主要内容是不允许状态检测器 由两个 NOR 组成 门。
看一下插入状态表。表中列出了 8 个允许的状态。
由于我们的移位器有四个触发器,所以总共有 16 个状态,其中有 8 个禁止状态。那将是表中未列出的那些。
理论上,只要移位寄存器处于RESET,我们就不会进入任何不允许的状态 首次使用前。
然而,在“现实世界”中,由于不可预见的噪音、电源线干扰、近乎雷击等原因连续运行多天后,约翰逊计数器可能会进入一种不允许的状态。
对于高可靠性应用,我们需要为这种渺茫的可能性做好规划。更严重的情况是上电时电路未清零。
在这种情况下,无法知道电路将在 16 种状态中的哪一种上电。
一旦处于不允许状态,约翰逊计数器将不会在没有干预的情况下返回到任何允许状态。这就是 NOR 的目的 门。
检查序列表 (QA QB QC ) =(010 )。这个序列没有出现在允许状态表中。
因此 (010 ) 是不允许的。它永远不应该发生。如果是,则约翰逊计数器处于不允许状态,需要退出到任何允许状态。
假设 (QA QB QC ) =(010 )。第二个NOR 门将取代QB =1 带有 0 在 D 输入到 FF QC .
换句话说,违规的010 替换为 000 .和 000 ,确实出现在表格中,将向右移动。
表中可能有三重0序列。这就是 NOR gates 使 Johnson 计数器从禁止状态变为允许状态。
并非所有不允许的状态都包含 010 顺序。然而,在几个时钟之后,这个序列将出现,因此任何不允许的状态最终都会被转义。
如果电路在没有 RESET 的情况下上电 ,输出将在几个时钟内不可预测,直到达到允许的状态。
如果这是特定应用程序的问题,请务必RESET 上电。
约翰逊计数器设备
提供一对输出状态解码的集成电路约翰逊计数器装置。
强森计数器的讨论我们已经看过CD4017的内部逻辑了。
4000 系列器件可在 3V 至 15V 电源下运行。 74HC’部分专为TTL兼容而设计,可以在2V至6V电源下工作,计数更快,输出驱动能力更强。
如需完整的器件数据表,请点击链接。
- 具有 10 个解码输出的 CD4017 约翰逊计数器 CD4022 具有 8 个解码输出的约翰逊计数器
- 74HC4017 Johnson 计数器,10 个解码输出
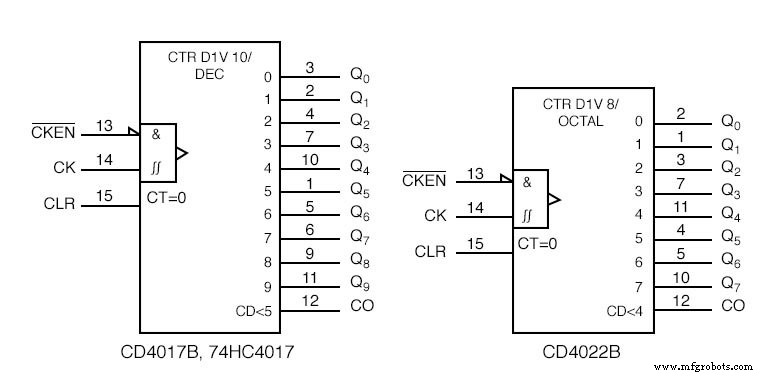
模的ANSI符号 -10(除以 10)和模 8 Johnson 计数器如上所示。
该符号具有计数器的特性,而不是移位寄存器的导数。
CD4022 modulo-8 和操作的波形之前已显示。 CD4017B/ 74HC4017 十进制计数器是一个具有十个解码输出的 5 级约翰逊计数器。
操作和波形类似于 CD4017。事实上,CD4017 和 CD4022 在同一个数据表中都有详细说明。
74HC4017 是十进制计数器的更现代版本。
这些设备用于需要解码输出的地方,而不是普通计数器上的二进制或 BCD(二进制编码十进制)输出。
通过解码,我们的意思是 10 行中的 1 行一次处于活动状态,用于 4017 代替传统计数器中的四位 BCD 代码。
请参阅之前的波形,了解“4022 八进制约翰逊计数器”的 1-of-8 解码。
实际应用
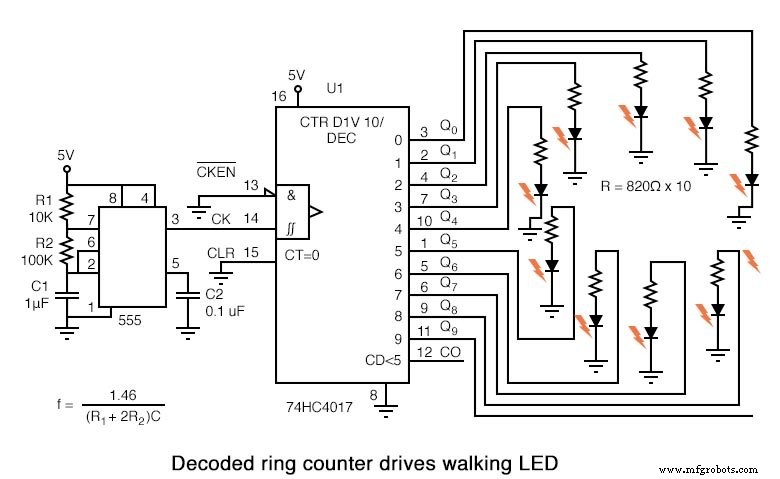
上面的约翰逊计数器每五分之一秒移动一个发光的 LED 围绕十的环移动。
请注意,使用 74HC4017 而不是‘40017,因为前者具有更大的电流驱动能力。
根据数据表,(在上面的链接中)在 VCC=5V 下工作,在 4ma 时 VOH=4.6V。
换句话说,输出可以在 4.6 V 时提供 4 mA 电流来驱动 LED。请记住,LED 通常由 10 到 20 毫安的电流驱动。
尽管如此,它们在低至 1 毫安时仍可见。这个简单的电路说明了“HC4017”的应用。
展览需要明亮的展示吗?然后,使用反相缓冲器驱动LED的阴极通过较低值的阳极电阻上拉到电源。
555定时器作为一个非稳态多谐振荡器,产生由R1 R2 C1决定的时钟频率。
这会驱动 74HC4017 每个时钟步长,由环上点亮的单个 LED 指示。
请注意,如果 555 不能可靠地驱动 4015 的时钟引脚,请在 555 和 4017 之间通过单个缓冲级运行它。
变量 R2 可以改变步进率。去耦电容 C2 的值并不重要。应该在‘4017 的电源和接地引脚之间应用一个类似的电容器。
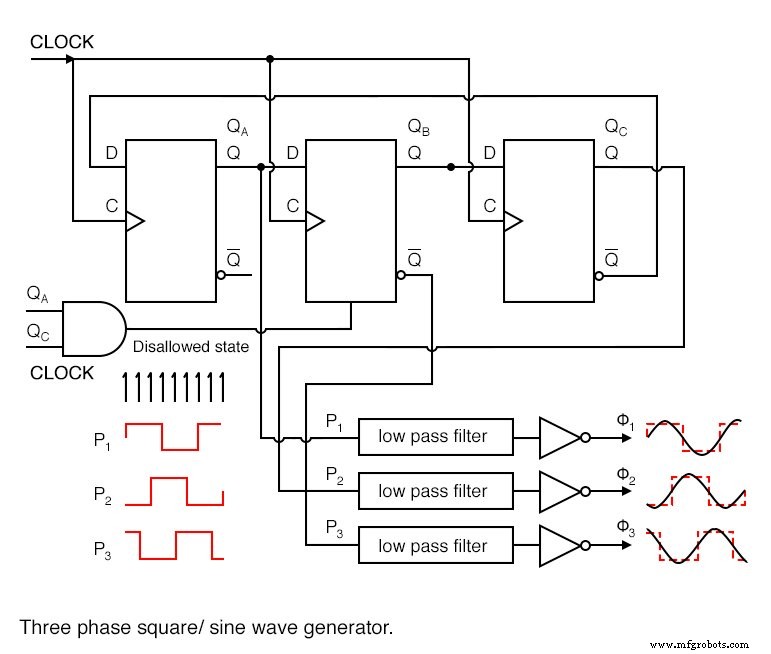
上面的约翰逊计数器产生三相方波,相位为 60 o 除了 (QA QB QC ).
但是,我们需要 120 o 电力应用的相位波形(见第二卷,交流)。
选择 P1=QA P2=QC P3=QB’ 产生 120 o 需要分阶段。见下图。
如果这些 (P1 P2 P3 ) 被低通滤波为正弦波并放大,这可能是三相电源的开始。
例如,您是否需要驱动一个小型的三相 400 Hz 飞机电机?
然后,将 6x 400Hz 馈送到上述电路 CLOCK .请注意,所有这些波形均为 50% 占空比。
下面的电路产生用于驱动三相步进电机的三相不重叠、占空比小于 50% 的波形。
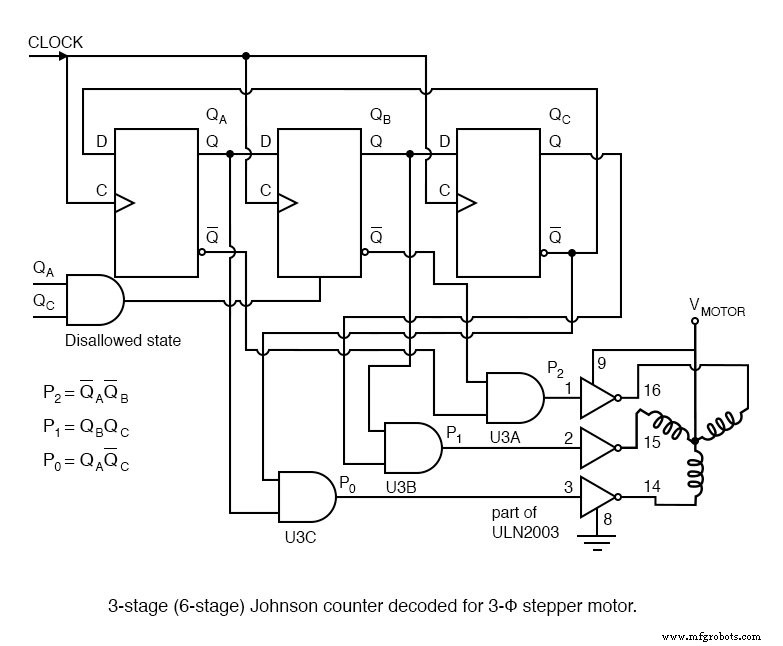
上面我们解码重叠的输出 QA QB QC 到非重叠输出 P0 P1 P2 如下图。
这些波形在使用上面显示的 ULN2003 驱动器或下面电路中显示的分立元件达林顿对驱动器从毫安级适当放大到分数安级后,驱动三相步进电机。
不包括电机驱动器,该电路需要三个 IC(集成电路)封装:两个双型“D”FF 封装和一个四与非门。
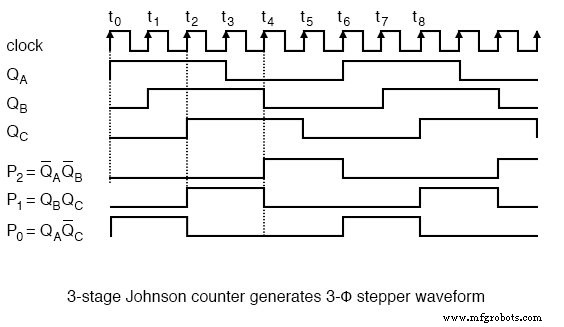
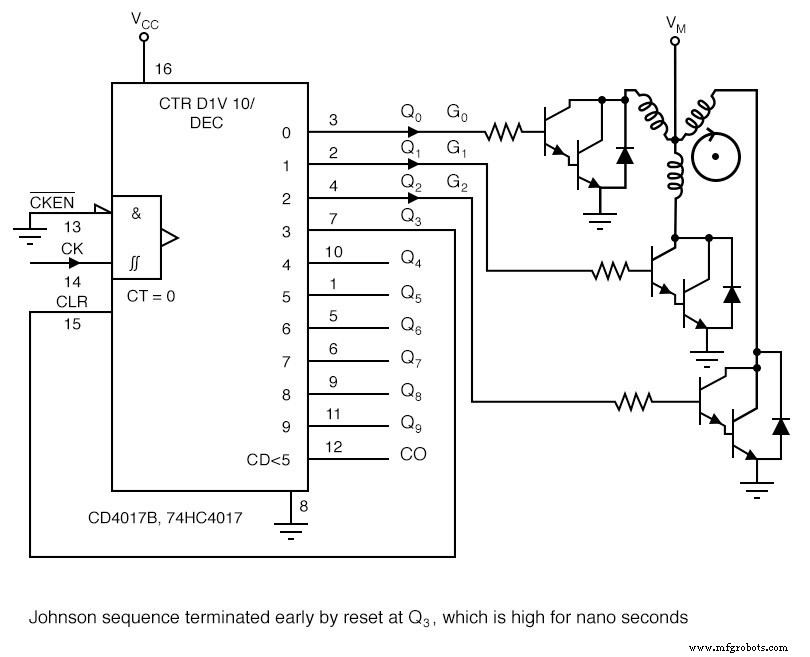
上面的单个 CD4017 通过在计数 3 处清除约翰逊计数器,在上面的电路中生成所需的三相步进波形 .
数 3 在清除自身之前持续不到一微秒。其他计数(Q0=G0 Q1=G1 Q2=G2 ) 保持一个完整的时钟周期。
上图所示的达林顿双极晶体管驱动器是 ULN2003 内部电路的替代品。
驱动程序的设计超出了本数字电子章节的范围。任一驱动器均可与任一波形发生器电路配合使用。
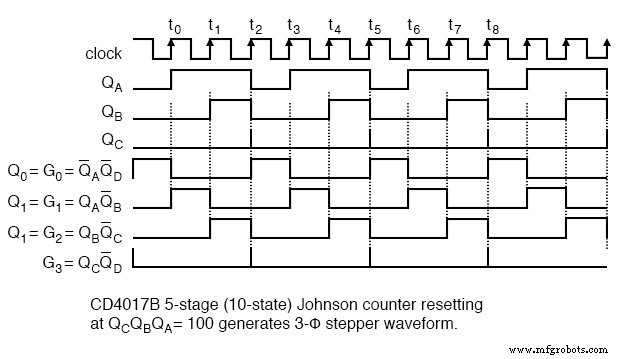
在本节前面所示的 CD4017 的内部逻辑上下文中,上述波形最有意义。
虽然,AND 显示了内部解码器的门控方程。信号QA QB QC 约翰逊计数器直接移位寄存器输出在引脚上不可用。
QD 波形显示‘4017的复位 每三个时钟。 Q0 Q1 Q2 等是解码输出,实际上在输出引脚上可用。
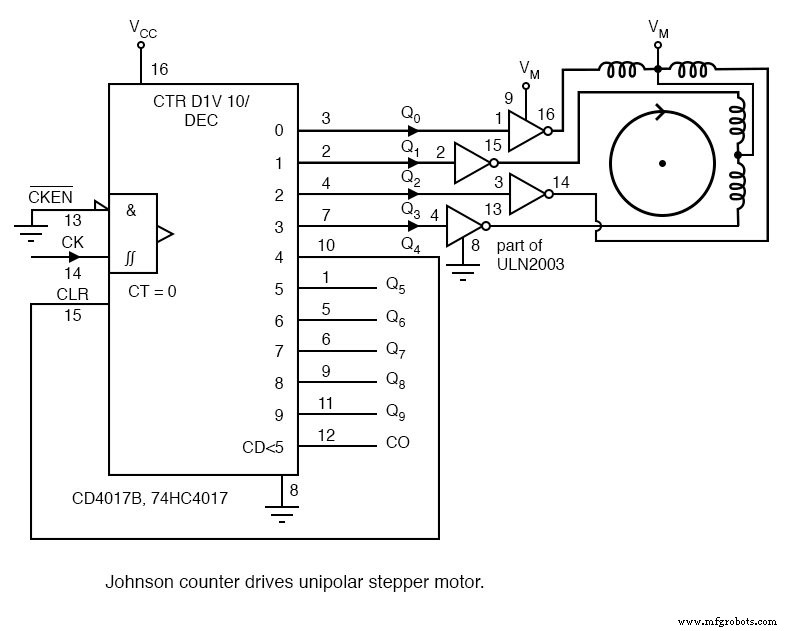
上面我们生成用于驱动单极步进电机的波形 ,只需要一种极性的驱动信号。
也就是说,我们不必将驱动器的极性反转到绕组。这简化了‘4017 和电机之间的电源驱动器。
上图中的达林顿对可以替代 ULN3003。
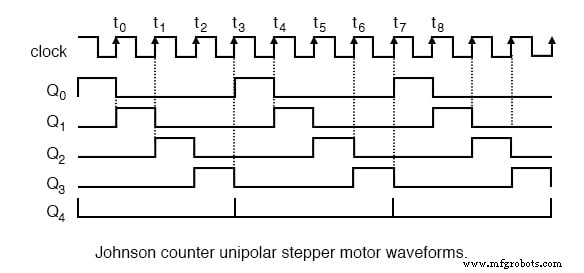
再次,CD4017B 生成所需的波形,并在终端计数后复位。
解码输出Q0 Q1 Q2 Q3 使用 Q4 连续驱动步进电机绕组 在每组四个脉冲结束时重置计数器。
相关工作表:
- 计数器工作表
- 移位寄存器工作表
工业技术