

什么是PID控制器?它的类型、工作和应用
PID 控制器——它们是什么以及它们是如何工作的?
PID 控制器 是工业自动化和应用中最常用的控制算法,超过 95% 的工业控制器是 PID 类型。 PID控制器用于对各种参数进行更精确的控制。
这些通常用于调节温度、压力、速度、流量和其他过程变量。由于强大的性能和简单的功能,这些已被大量工业应用所接受,其中更精确的控制是最重要的要求。让我们看看PID 控制器是如何工作的 ?
- 相关文章:什么是分布式控制系统 (DCS)?

什么是 PID 控制器?
比例、积分和微分动作的组合通常被称为 PID 动作,因此得名 PID (比例-积分-微分) 控制器 .这三个基本系数在每个 PID 控制器中根据具体应用而变化,以获得最佳响应。
它从传感器获取输入参数,称为实际过程变量。它还接受所需的执行器输出,称为设置变量,然后计算并组合比例、积分和微分响应来计算执行器的输出。
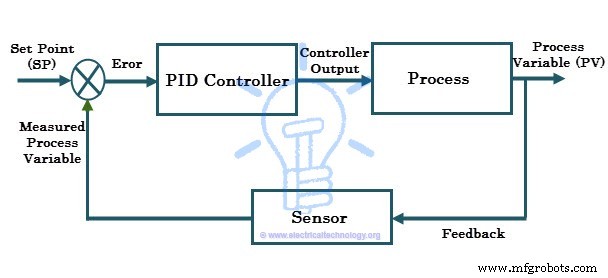
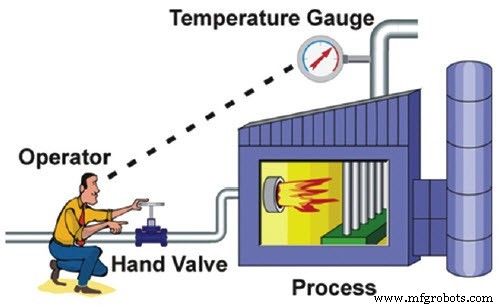
考虑上图所示的典型控制系统,其中一个过程的过程变量必须保持在一个特定的水平。假设过程变量是温度(摄氏度)。为了测量过程变量(即温度),使用了传感器(假设是 RTD)。
设定点是过程的期望响应。假设过程必须保持在 80 摄氏度,那么设定点是 80 摄氏度。假设传感器测得的温度是 50 摄氏度(这只是一个过程变量),但温度设定点是 80 摄氏度。
PID 控制算法中实际值与期望值的偏差导致根据比例、积分的组合向执行器(这里是加热器)产生输出和衍生反应。因此 PID 控制器不断改变执行器的输出,直到过程变量稳定到设定值。 这也称为闭环反馈控制系统 .
相关帖子:
- 什么是交流驱动器?电气驱动器和 VFD 的工作方式和类型
- 什么是直流驱动?直流驱动器的操作和分类
PID控制器的工作
在手动控制中,操作员可以定期读取过程变量(必须控制的如温度、流量、速度等)并调整控制变量(即进行操作以使控制变量达到规定的限制,例如加热元件、流量阀、电机输入等)。另一方面,在自动控制中,测量和调整是连续自动进行的。
所有现代工业控制器都是自动类型的(或闭环控制器),通常用于产生一种或多种控制动作。这些控制动作包括
- 开关控制器
- 比例控制器
- 比例积分控制器
- 比例微分控制器
- 比例积分微分控制器
在 ON-OFF 控制器的情况下,有两种状态可以控制受控变量,即完全打开(当过程变量低于设定点时)或完全关闭(当过程变量高于设定点时)。所以输出本质上是振荡的。为了实现精确控制,大多数行业都使用PID控制器(或PI或PD 取决于应用程序)。让我们看看这些控制动作。
P-Controller
比例控制 或者干脆P-controller 产生与电流误差成比例的控制输出。这里的误差是设定点和过程变量之间的差异(即 e =SP – PV)。这个误差值乘以比例增益(Kc)决定了输出响应,或者换句话说,比例增益决定了比例输出响应与误差值的比值。
例如,误差大小为20,Kc为4,则比例响应为80。如果误差值为0,则控制器输出或响应为零。通过增加比例增益 Kc 的值来增加响应(瞬态响应)的速度。但是,如果 Kc 增加超出正常范围,过程变量开始以更高的速率振荡,这将导致系统不稳定。 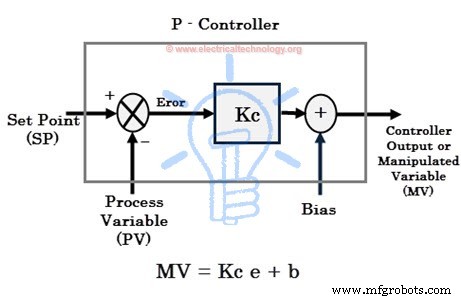
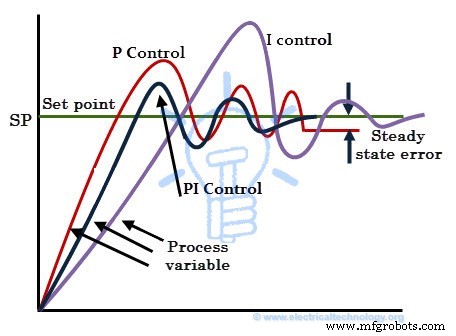
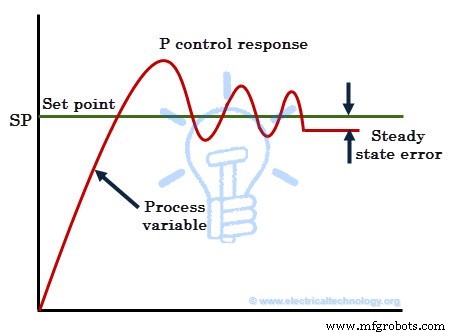 虽然P-controller提供了过程变量的稳定性和良好的响应速度,但是之间总会有误差设定点和实际过程变量。大多数情况下,该控制器都带有手动复位或偏置,以减少单独使用时的误差。但是,此控制器无法实现零错误状态。因此,如图所示,p-controller响应中总会存在一个稳态误差。
虽然P-controller提供了过程变量的稳定性和良好的响应速度,但是之间总会有误差设定点和实际过程变量。大多数情况下,该控制器都带有手动复位或偏置,以减少单独使用时的误差。但是,此控制器无法实现零错误状态。因此,如图所示,p-controller响应中总会存在一个稳态误差。
相关文章:
- 什么是工业自动化 |工业自动化的类型
- 智能家居自动化系统 - 电路和源代码
I-控制器
- 集成控制器 或 I 控制器 主要用于减小系统的稳态误差。积分分量在一段时间内对误差项进行积分,直到误差变为零。这导致即使是很小的误差值也会导致产生高积分响应。在零误差条件下,它将最终控制装置的输出保持在其最后一个值,以保持零稳态误差,但在 P 控制器的情况下,当误差为零时输出为零。
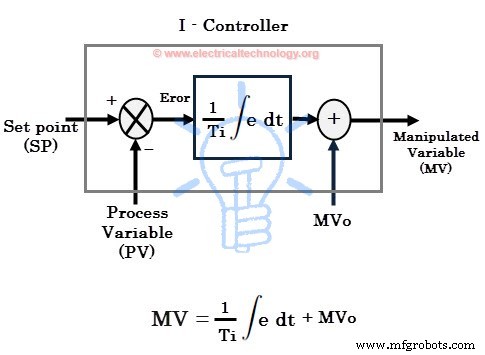
如果误差为负,则积分响应或输出将减小。单独使用 I-controller 时响应速度较慢(表示响应较慢),但提高了稳态响应。通过减小积分增益Ki,可以提高响应速度。
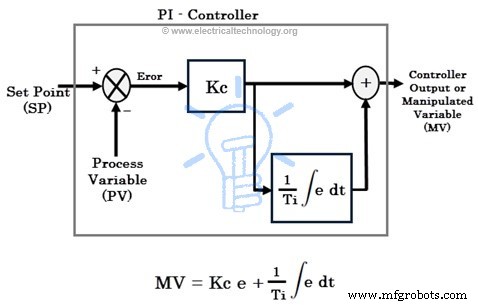
对于许多应用,比例和积分控制相结合以实现良好的响应速度(在 P 控制器的情况下)和更好的稳态响应(在 I 控制器的情况下)。最常见的 PI 控制器 用于工业操作,以改善瞬态和稳态响应。 仅I-control、仅p-control和PI控制的响应如下图所示 .
D-控制器响应
一个导数控制器( 或者干脆 D-Controller) 查看每单位时间过程变量的变化速度,并产生与变化率成正比的输出。微分输出等于误差变化率乘以微分常数。当处理器变量开始高速变化时使用 D 控制器。
在这种情况下,D-controller 将最终控制设备(如控制阀或电机)移动到抵消过程变量快速变化的方向。需要注意的是,单独的 D-controller 不能用于任何控制应用。 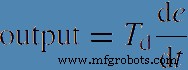
微分动作提高了响应速度,因为它为输出提供了启动,从而预测了错误的未来行为。如果微分项很大(通过增加微分常数或时间 Td 来实现),则 D 控制器对过程变量的变化响应更快。
在大多数 PID 控制器中,D 控制响应仅取决于过程变量,而不是误差。这避免了在操作员突然改变设定点的情况下输出尖峰(或输出突然增加)。而且大多数控制系统使用较少的微分时间 td,因为微分响应对过程变量中的噪声非常敏感,这导致即使对于少量噪声也能产生极高的输出。 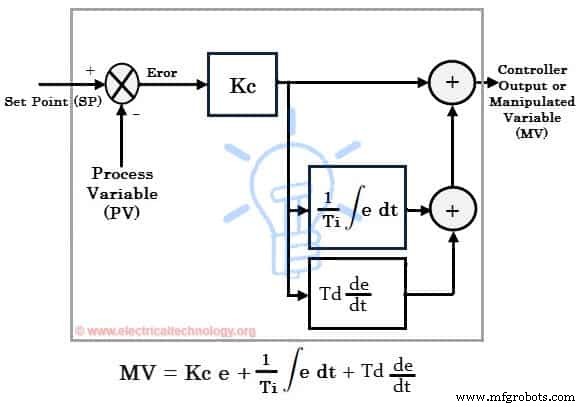
因此,通过组合比例、积分和微分控制响应,形成PID控制器。 PID 控制器得到普遍应用;但是,必须知道 PID 设置并对其进行适当调整以产生所需的输出。整定是指通过设置比例、积分和微分参数的最佳增益,从 PID 控制器获得理想响应的过程。 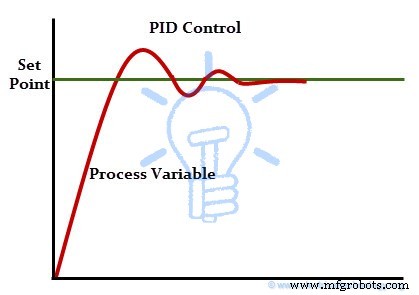
有不同的方法可以调整 PID 控制器以获得所需的响应。其中一些方法包括试错法、过程反应曲线技术和 Zeigler-Nichols 方法。最常用的是 Zeigler-Nichols 和试错法。
这是关于 PID 控制器及其工作的。由于控制器结构简单,PID控制器适用于各种过程。即使不知道详细的过程数学模型,它也可以针对任何过程进行调整。一些应用包括基于PID控制器的电机速度控制、温度控制、压力控制、流量控制、液位等。
实时 PID 控制器
当今市场上有不同类型的PID控制器可供选择,可用于液位、流量、温度和压力等所有工业控制需求。在决定使用 PID 控制过程的此类参数时,选项包括使用 PLC 或独立 PID 控制器。
独立 PID 控制器用于需要监视和控制一个或两个回路的情况,或者用于大型系统难以访问的情况。这些专用控制设备为单回路和双回路控制提供了多种选择。独立 PID 控制器提供多个设定点配置,并生成独立的多个警报。 
其中一些独立控制器包括 Yokogava 温度控制器、霍尼韦尔 PID 控制器、OMEGA 自动调谐 PID 控制器、ABB PID 控制器和西门子 PID 控制器。
大部分控制应用,PLC 被用作 PID 控制器。 PID 块内置在 PLC/PAC 中,为精确控制提供高级选项。 PLC 比独立控制器更智能、更强大,使工作更轻松。无论是西门子、ABB、AB、台达、艾默生还是横河PLC,每个PLC都在其编程软件中包含PID块。
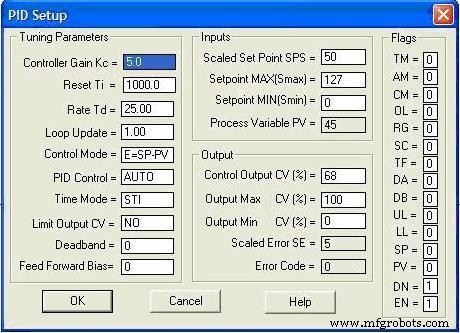
下图显示了Allen Bradley (AB) PID 块 及其设置窗口。 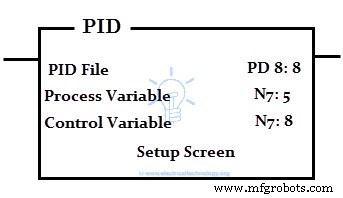
下图为西门子PID模块 . 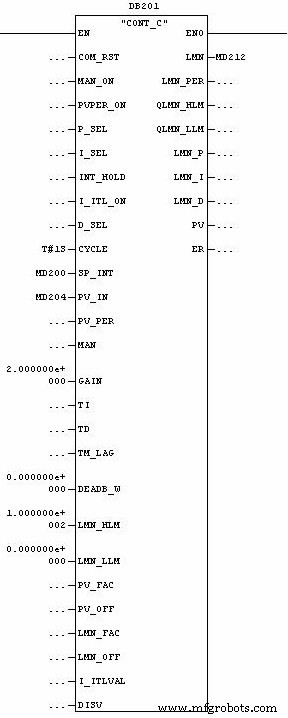
下图为PID控制器 LabVIEW PID 工具集提供的 VI。 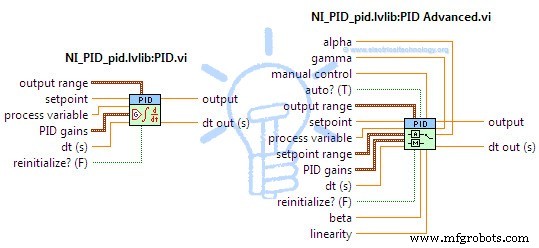
工业技术