

Arduino Pong Game on 24x16 Matrix with MAX7219
组件和用品
 |
| × | 1 | |||
| × | 6 | ||||
 |
| × | 2 | |||
 |
| × | 1 |
必要的工具和机器
 |
|
应用和在线服务
 |
|
关于这个项目
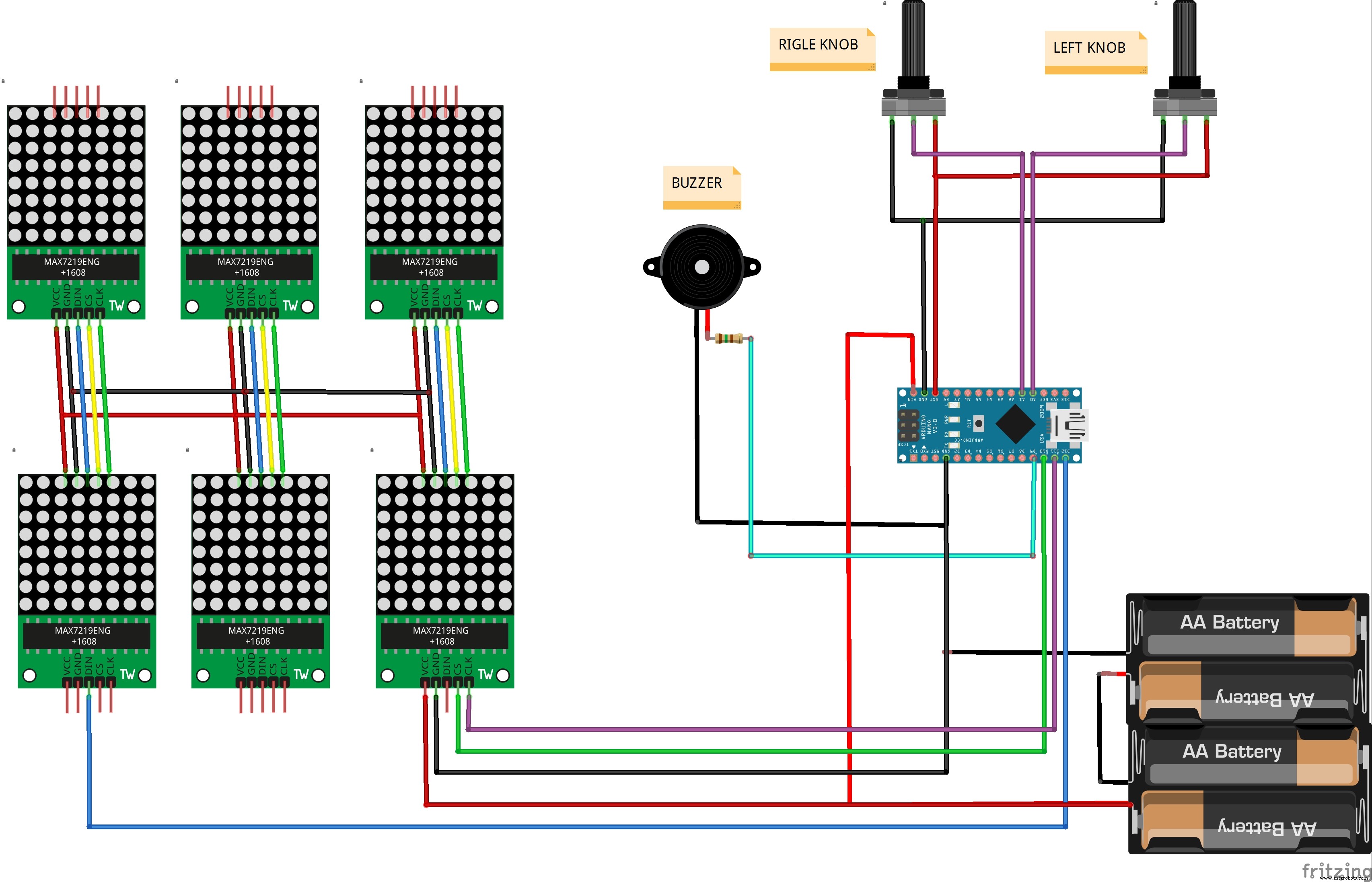
我在 6 个阵列上构建了这个小型乒乓球控制台。根据说明和代码的 8x8 LED 矩阵:https://www.instructables.com/id/Pong/
我没有使用定制的矩阵板,而是从 Aliexpress 购买了带有 MAX7219 的廉价现成 8x8 模块。
每块板的“时钟”和“负载”引脚都连接在一起。第一个矩阵的“Din”引脚到Arduino,“Dout”到下一个矩阵的“Din”等。控制桨是两个10k电位器连接到Arduino的A0和A1模拟引脚,蜂鸣器连接到D9引脚。
最后我把设备放在一个塑料盒里,把控制器放在盒子里进行电气安装。
您可以从以下位置下载 LedControl 库:
https://github.com/wayoda/LedControl
代码
- 代码
代码Arduino
//我们总是要包含库#include "LedControl.h" byte rightscore;字节左分; inttoneloop=1000;字节pongdisplay [] ={//用于在启动时以显示 “傍” B11111111,B00000000,B00001001,B00000000,B00001001,B00000000,B00000110,B00000000,B00000000,B00000000,B00000000,B00000000,B01110000,B00000000,B10001000,B00000000,B10001000 ,B00000000,B01110000,B00000000,B00000000,B00000000,B00000000,B00000000,B11110000,B00000000,B00001000,B00000000,B00001000,B00000000,B11110000,B00000000,B00000000,B00000000,B00000000,B00000000,B11001111,B00000000,B10001001,B00000000,B10001001,B00000000 , B11111111, B00000000, B00000000, B00000000, B00000000, B00000000, }; byte zero[]={ // 用于在显示分数时显示'0' B00000000, B00000000, B00111100, B01000010, B01000010, B01000010, B00111100, B0000000 }; byte one[]={ // 用于在显示分数时显示'1' B00000000, B00000000, B10001000, B10000100, B11111110, B10000000, B10000000, B0000000 }; byte two[]={ // 用于显示'2'用于显示分数 B00000000, B01100010, B01010001, B01010001, B01001001, B01000110, B00000000, B000000, B000000 用于显示三个[byte]{0}; 3' 用于显示分数 B00000000, B00100110, B01000001, B01001001, B00110110, B00000000, B00000000, B00000000};byte 四 []10 时用于显示 B01001001, B00110000, B0000004,04,04,04,040 时B00001000,B00001000,B11111111,B00000000,B00000000};字节5 [] ={//用于显示一个 '5' 显示得分B00000000时,B00000000,B10011110,B10010010,B10010010,B11110010,B00000000,B00000000};字节displayevens =0;byte displayrow=0;byte displayindex=0;byte displayodds=1;unsigned long time;unsigned long currenttime;/* 现在我们需要一个 LedControl 来使用。引脚 12 连接到 DataIn 引脚 11 连接到 CLK 引脚 10 连接到 LOAD 我们有 6 个 MAX72XX。 */字节模式;字节偏转;字节进位;int行;LedControl lc=LedControl(12,11,10,6);long randnumber;byte dir;int startpos;byte row;byte column;long randNumber;byte start;byte diry;int pass;byte limit;#define leftpaddle 0 //left pong 旋钮连接到模拟输入 0#define rightpaddle 1 // 右 pong 旋钮连接到模拟输入 1int directionpong;int rightpongval;int leftpongval;byteblinkx;byte乒乓[] ={//商店球和桨B00000000的位置,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000 ,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000 , B00000000, B00000000, B00000000, B00000000, B00000000};无效设置(){ pinMode(左桨,输入); //桨是一个输入。 pinMode(右桨,输入); // 桨是一个输入。 Serial.begin(9600); // 用于调试的串行通信。设置为 9600 波特 // 下面的这些语句经过并将矩阵设置为给定的设置 lc.shutdown(0,false); lc.setIntensity(0,1); lc.clearDisplay(0); lc.shutdown(1,false); lc.setIntensity(1,1); lc.clearDisplay(1); lc.shutdown(2,false); lc.setIntensity(2,1); lc.clearDisplay(2); lc.shutdown(3,false); lc.setIntensity(3,1); lc.clearDisplay(3); lc.shutdown(4,false); lc.setIntensity(4,1); lc.clearDisplay(4); lc.shutdown(5,false); lc.setIntensity(5,1); lc.clearDisplay(5); while(displayevens<5){ while(displayrow<=7){ lc.setRow(displayevens,displayrow,pongdisplay[displayindex]);显示行++;显示索引+=2; } displayrow=0; displayevens+=2; } displayrow=0;显示索引=1;随机种子(模拟读取(4));开始=1;时间=毫秒();当前时间=毫秒(); while(currenttime-time<3000){ leftpongval=analogRead(leftpaddle); leftpongval=map(leftpongval,1023,20,2,0); if(leftpongval==0){ lc.setLed(3,2,7,true); lc.setLed(3,3,7,false); lc.setLed(3,4,7,false);模式=1;极限=2; } if(leftpongval==1){ lc.setLed(3,2,7,true); lc.setLed(3,3,7,true); lc.setLed(3,4,7,false);模式=2;极限=1; } if(leftpongval==2){ lc.setLed(3,2,7,true); lc.setLed(3,3,7,true); lc.setLed(3,4,7,true);模式=3;极限=2; } 延迟(50); lc.clearDisplay(3);当前时间=毫秒(); } } void loop(){ 桨(); pongsim();显示屏(); } void paddles(){ //从桨中读取数据并将其显示在数组中 int searchbit; int进位=0; // Serial.print("LeftPaddle:"); // Serial.println(analogRead(leftpaddle)); leftpongval=analogRead(leftpaddle); leftpongval=map(leftpongval,0,1010,0,13); rightpongval=analogRead(rightpaddle); rightpongval=map(rightpongval,1023,20,0,13); // Serial.print("RightPaddle:"); // Serial.println(rightpongval); //清除前一个桨以显示下一个 pong[0]=B00000000;乒乓[1]=B00000000;乒乓[46]=B00000000;乒乓[47]=B00000000; //-------------------------------右桨 if(mode!=3){ if(rightpongval<=7) { rightpongval=map(rightpongval,0,7,7,0); bitSet(pong[46], rightpongval); if(rightpongval-1>=0){ bitSet(pong[46],rightpongval-1); } else{ bitSet(pong[47], 7); if(mode!=2){ bitSet(pong[47],6);进位=1; } } if(mode!=2){ if(carry==0){ if(rightpongval-2>=0){ bitSet(pong[46], rightpongval-2); } else{ bitSet(pong[47], 7);进位=1; } } } } if(rightpongval>7){ rightpongval=map(rightpongval,8,13,7,limit);位集(乒乓[47],rightpongval); bitSet(pong[47],rightpongval-1); if(mode!=2){ bitSet(pong[47],rightpongval-2); } } } else{ 乒乓[46]=B11111111;乒乓[47]=B11111111; lc.setRow(4,7,pong[46]); lc.setRow(5,7,pong[47]); } //-----------------------------------左桨进位=0; if(leftpongval<=7){ leftpongval=map(leftpongval,0,7,7,0); bitSet(pong[0], leftpongval); if(leftpongval-1>=0){ bitSet(pong[0],leftpongval-1); } else{ bitSet(pong[1], 7); if(mode!=2){ bitSet(pong[1],6);进位=1; } } if(mode!=2){ if(carry==0){ if(leftpongval-2>=0){ bitSet(pong[0], leftpongval-2); } else{ bitSet(pong[1], 7); } } } } if(leftpongval>7){ leftpongval=map(leftpongval,8,13,7,limit);位集(乒乓 [1],leftpongval); bitSet(pong[1],leftpongval-1); if(mode!=2){ bitSet(pong[1],leftpongval-2); } } }void pongsim(){ if( ((line==2 || line==3) &&diry ==0) || ((line==44 || line==45) &&diry==1) ){ ball_meets_paddle(); } if(start==1){ // 开始新游戏 randnumber=random(1,7); // 想出一个随机起始位 dir=random(2); // 想出一个从左到右或从右到左的随机开始运动 diry=random(2); // 想出一个随机的起始 y 移动方向 if(diry==0){ // 如果 y 方向为 0。从下往上移动 line=random(30,34); // 想出一个 30-34 bitSet(pong[line],randnumber) 之间的随机起始行; // 将随机线上的位设置为 pong 数组中的随机位等于 1 } if(diry==1){ // 如果 y 方向为 1。从上到下的运动 line=random(12,16); // 想出一个 12-16 之间的随机起始线 bitSet(pong[line],randnumber); // 将随机线上的位设置为 pong 数组中的随机位等于 1 } start=0; // 将起始变量设置为 0 } if(diry==0){ // 如果球从底部移动到顶部 if(dir==0){ // 如果球从右向左移动 if (deflect==0 &&Carry==0){ // 如果球没有偏转或转移到另一条矩阵线-=2; // 通过从线 pong[line]=pong[line+2] <<1 中减去 2 将球推向另一侧;// 将球向左移动并使其等于新线 pong[line+2] =B00000000; // 清除球的旧线 } if(carry==1){ // 如果球必须转移到新的矩阵 line-=3; // 通过从线 pong[line]=B00000001 中减去 3 将球推向另一侧; // 设置新行 pong[line+3]=B00000000; //清除球carry=0的旧线; // 将进位变量设置回 0 return; // 到这里就完成了 } if(deflect==1){ // 如果球必须偏离墙线-=2; // 通过从线 pong[line]=B01000000 中减去 2 将球推向另一侧; // 设置新行 pong[line+2]=B00000000; // 清除球的旧线 deflect=0; // 将偏转变量设置回 0 dir=1; // 切换方向从左到右 return; // 到这里就完成了 } if(bitRead(pong[line],7)==1){ // 如果球在这条线的第 7 位 if(line==3|| line==5 || line==7 || line==9 || line==11 || line==13 || line==15 || // 如果是奇数线 line==17 || line==19 | | line==21 || line==23 || line==25 || line==27 || line==29 || line==31 || line==33 || line==35 || line ==37 || 行==39 || 行==41 || 行==43 || 行==45){ 进位=1; // 球需要结转到另一个矩阵 return; // 我们到此完成 } else{ // 否则球在偶数线上 if(line!=2){ // 线不能是 2,因为球在 2 deflect=1 处与桨相遇; // 球需要偏离墙壁返回; // 我们在这里完成了 } } } } // 上面的注释应该解释下面的所有内容。一些东西,不同的参数。 if(dir==1){ if(deflect==0 &&Carry==0){ line-=2; pong[line]=pong[line+2]>> 1;乒乓[线+2]=B00000000; } if(carry==1){ line--;乒乓[线]=B10000000;乒乓[线+1]=B00000000;进位=0;返回; } if(deflect==1){ line-=2;乒乓[线]=B00000010;乒乓[线+2]=B0000000;偏转=0;目录=0;返回; } if(bitRead(pong[line],0)==1){ if( line==2 || line==4 || line==6 || line==8 || line==10 || line ==12 || line==14 || line==16 || line==18 || line==20 || line==22 || line==24 || line==26 || line==28 || line==30 || line==32 || line==34 || line==36|| line==38 || line==40 ||line==42 || line==44 ) {进位=1;返回; } else{ if(line!=3){ deflect=1;返回; } } } } }//------------------------------------------- -diry =1 下面 if(diry==1){ if(dir==0){ if(deflect==0 &&Carry==0){ line+=2; pong[line]=pong[line-2] <<1; pong[line-2]=B00000000; } if(carry==1){ line+=1;乒乓[线]=B00000001; pong[line-1]=B00000000;进位=0;返回; } if(deflect==1){ line+=2;乒乓[线]=B01000000; pong[line-2]=B00000000;偏转=0;目录=1;返回; } if(bitRead(pong[line],7)==1){ if( line==5 || line==7 || line==9 || line==11 || line==13 || line ==15 || line==17 || line==19 || line==21 || line==23 || line==25 || line==27 || line==29 || line==31 || line==33 || line==35 || line==37 || line==39|| line==41 ||line==43 || line==45){ Carry=1;返回; } else{ if(line!=44){ deflect=1;返回; } } } } if(dir==1){ if(deflect==0 &&Carry==0){ line+=2; pong[line]=pong[line-2]>> 1; pong[line-2]=B00000000; } if(carry==1){ line+=3;乒乓[线]=B10000000; pong[line-3]=B00000000;进位=0;返回; } if(deflect==1){ line+=2;乒乓[线]=B00000010; pong[line-2]=B0000000;偏转=0;目录=0;返回; } if(bitRead(pong[line],0)==1){ if(line==2|| line==4 || line==6 || line==8 || line==10 || line ==12 || line==14 || line==16 || line==18 || line==20 || line==22 || line==24 || line==26 || line==28 || line==30 || line==32 || line==34 || line==36|| line==38 || line==40 ||line==42 || line==44 ) {进位=1;返回; } else{ if(line!=45){ deflect=1;返回; } } } } }}void displayscreen(){ displayevens=0;显示行=0;显示索引=0; displayodds=1; while(displayevens<5){ while(displayrow<=7){ lc.setRow(displayevens,displayrow,pong[displayindex]);显示行++;显示索引+=2; } displayrow=0; displayevens+=2; } displayrow=0;显示索引=1; while(displayodds<6){ while(displayrow<8){ lc.setRow(displayodds,displayrow,pong[displayindex]);显示行++;显示索引+=2; } displayrow=0; displayodds+=2; }} void clearscreen(){ int clearing=0; while(clearing<49){ pong[clearing]=B00000000;清算++; }}void ball_meets_paddle(){ byte search1=0; if(diry==0){ // 球向上移动 if(dir==0){ // 球从右向左移动 while(search1<8){ // 找到球所在的位置 if(bitRead(pong) [line],search1)==1){ //找到球所在的位 if(line==2){ if(search1!=6 &&search1!=7){ //如果它在第 2 行,使确保它不在那些特殊位上 if( bitRead(pong[0], search1)==1){ // 检查那里是否有桨 diry=1; //切换y方向,使其朝向其他桨音(9,500,100); } else if( bitRead(pong[0], search1+1)==1){ diry=1;目录=1;音调(9,500,100); if(search1==0){进位=1; } } else { // 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } if(search1==6){ //特殊位,需要偏转它进来的相同路径 if(bitRead(pong[0],7)==1){ //那里有一个桨 pong[2] =B01000000;目录=1;脏=1;音调(9,500,100); } else{//错过了,没有桨。音调(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } if(search1==7){//特殊位,需要先跳墙 if(bitRead(pong[0],6)==1){// 找到桨 pong[2]=B00100000;脏=1;目录=1;线=2;音调(9,500,100);显示屏(); } else{//错过了,没有桨。音调(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } } if(line==3){ if(search1!=7){ //如果它在第3行,确保它不在那些特殊位上 if(bitRead(pong[1], search1)==1) { // 检查那里是否有桨 diry=1; //切换y方向,使其朝向其他桨音(9,500,100); } else if( bitRead(pong[1], search1+1)==1){ diry=1;目录=1;音调(9,500,100); } else { // 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } if(search1==7){//特殊位,需要结转到下一个矩阵 if(bitRead(pong[1],7)==1){ //在那里找到一个桨 //pong[2] =B10000000; //清除它在dir=0上的行; //方向相同diry=1; // y 方向改变色调(9,500,100); } else if(bitRead(pong[0],0)==1){ dir=1;脏=1;音调(9,500,100);进位=0; } else{// 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } } } search1++; } } if(dir==1){//球从左向右移动 while(search1<8){ //找到球所在的位置 if(bitRead(pong[line],search1)==1) { //找到球所在的位 if(line==3){ if(search1!=1 &&search1!=0){ //如果它在第 3 行,请确保它不在特殊位 if( bitRead(pong[1], search1)==1){ //检查是否有桨 diry=1; // 切换 y 方向,使球朝向另一个桨音(9,500,100); } else if(bitRead(pong[1], search1-1)==1){ diry=1;目录=0;音调(9,500,100); if(search1==7){进位=1; } } else{ // 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } if(search1==1){ if(bitRead(pong[1],0)==1){ pong[3]=B00000010;目录=0;脏=1;音调(9,500,100); }其他{音(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } if(search1==0){ if(bitRead(pong[1],0)==1){ pong[3]=B00000100;脏=1;目录=0;线=3;音调(9,500,100);显示屏(); }其他{音(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } } if(line==2){ if(search1!=0){ if(bitRead(pong[0], search1)==1){ //检查是否有paddle diry=1; // 切换 y 方向,使球朝向另一个桨音(9,500,100); } else if(bitRead(pong[0], search1-1)==1){ diry=1;目录=0;音调(9,500,100); } else{ // 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } if(search1==0){ if(bitRead(pong[0],0)==1){ // pong[2]=B00000001;线=2;目录=1;脏=1;音调(9,500,100);返回; } else if(bitRead(pong[1],7)==1){ diry=1;目录=0;音调(9,500,100);进位=0; }其他{音(9,500,300);清屏();开始=1;延迟(1000);得分左(); } } } } search1++; } } }//----------------------------------------- ------------------------- if(diry==1){ // 球向上移动 if(dir==0){ //球移动从右到左 while(search1<8){ //找到球所在的位 if(bitRead(pong[line],search1)==1){ //找到球所在的位 if(line==44){ if( search1!=6 &&search1!=7){ //如果它在第 2 行,请确保它不在那些特殊位上 if( bitRead(pong[46], search1)==1){ //检查那里是否有桨 diry=0; //切换y方向,使其朝向其他桨音(9,500,100); } else if( bitRead(pong[46], search1+1)==1){ diry=0;目录=1;音调(9,500,100); if(search1==0){进位=1; } } else { // 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } if(search1==6){ //特殊位,需要偏转它进来的相同路径 if(bitRead(pong[46],7)==1){ //那里有一个桨 dir=1;脏=0;音调(9,500,100); } else{//错过了,没有桨。音调(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } if(search1==7){//特殊位,需要先跳墙 if(bitRead(pong[46],6)==1){// 找到桨 pong[44]=B00100000;脏=0;目录=1;音调(9,500,100);显示屏();线=44;返回; } } } if(line==45){ if(search1!=7){ //如果它在第 3 行,请确保它不在那些特殊位上 if( bitRead(pong[47], search1)==1) { // 检查那里是否有桨 diry=0; //切换y方向,使其朝向其他桨音(9,500,100); } else if( bitRead(pong[47], search1+1)==1){ diry=0;目录=1;音调(9,500,100); } else { // 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } if(search1==7){//特殊位,需要结转到下一个矩阵 if(bitRead(pong[47],7)==1){ //在那里找到一个paddle // pong[45] =B10000000; //清除 line=45 上的行;目录=0; //方向相同diry=0; // y 方向改变色调(9,500,100); } else if(bitRead(pong[46],0)==1){ dir=1;脏=0;音调(9,500,100);进位=0; } else{// 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } } } search1++; } } if(dir==1){//球从左向右移动 while(search1<8){ //找到球所在的位置 if(bitRead(pong[line],search1)==1) { //找到球所在的位 if(line==45){ if(search1!=1 &&search1!=0){ //如果它在第 3 行,确保它不在特殊位 if( bitRead(pong[47], search1)==1){ //检查是否有桨 diry=0; // 切换 y 方向,使球朝向另一个桨音(9,500,100); } else if(bitRead(pong[47], search1-1)==1){ diry=0;目录=0;音调(9,500,100); if(search1==7){进位=1; } } else{ // 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } if(search1==1){ if(bitRead(pong[47],0)==1){ pong[43]=B00000010;目录=0;脏=0;音调(9,500,100); }其他{音(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } if(search1==0){ if(bitRead(pong[47],1)==1){ pong[45]=B00000100;脏=0;目录=0;线=45;音调(9,500,100);显示屏(); }其他{音(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } } if(line==44){ if(search1!=0){ if(bitRead(pong[46], search1)==1){ //检查是否有paddle diry=0; // 切换 y 方向,使球朝向另一个桨音(9,500,100); } else if(bitRead(pong[46], search1-1)==1){ diry=0;目录=0;音调(9,500,100); } else{ // 没有桨,错过了球音(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } if(search1==0){ if(bitRead(pong[46],0)==1){ pong[44]=B00000001;线=44;目录=1;脏=0;音调(9,500,100); } else if(bitRead(pong[47],7)==1){ dir=0;脏=0;音调(9,500,100);进位=0; }其他{音(9,500,300);清屏();开始=1;延迟(1000);得分权(); } } } } search1++; } } } 通=1; search1=0;}void scoreleft(){ clearscreen(); rightcore++;设置分数();显示屏(); if(rightscore==5){ while(blinkx++<4){ clearscreen();显示屏();延迟(500);设置分数();显示屏();延迟(500); } 闪烁x=0;权利分数=0; leftscore=0; }其他{延迟(2000); } clearscreen();}void scoreright(){ clearscreen(); leftscore++;设置分数();显示屏(); if(leftscore==5){ while(blinkx++<4){ clearscreen();显示屏();延迟(500);设置分数();显示屏();延迟(500); } 闪烁x=0;权利分数=0; leftscore=0; }其他{延迟(2000); } clearscreen();}void setscore(){ byte setScoreLoop=0; while(setScoreLoop<=7){ if(leftscore==0){ pong[setScoreLoop*2]=zero[setScoreLoop]; } if(leftscore==1){ pong[setScoreLoop*2]=one[setScoreLoop]; } if(leftscore==2){ pong[setScoreLoop*2]=two[setScoreLoop]; } if(leftscore==3){ pong[setScoreLoop*2]=three[setScoreLoop]; } if(leftscore==4){ pong[setScoreLoop*2]=four[setScoreLoop]; } if(leftscore==5){ pong[setScoreLoop*2]=five[setScoreLoop]; } if(rightscore==0){ pong[32+(setScoreLoop*2)]=zero[setScoreLoop]; } if(rightscore==1){ pong[32+(setScoreLoop*2)]=one[setScoreLoop]; } if(rightscore==2){ pong[32+(setScoreLoop*2)]=two[setScoreLoop]; } if(rightscore==3){ pong[32+(setScoreLoop*2)]=three[setScoreLoop]; } if(rightscore==4){ pong[32+(setScoreLoop*2)]=four[setScoreLoop]; } if(rightscore==5){ pong[32+(setScoreLoop*2)]=five[setScoreLoop]; } setScoreLoop++; } 乒乓[20]=B00011000;乒乓[22]=B00011000;乒乓[24]=B00011000; } 示意图
制造工艺
- Arduino Gyroscope Game with MPU-6050
- Arduino Pong Game - OLED 显示器
- Arduino 游戏控制器
- 使用 Arduino 控制硬币接收器
- Arduino Pong Game on 24x16 Matrix with MAX7219
- 自制 16x8 矩阵上的 Arduino Nano 俄罗斯方块游戏
- Arduino 带蓝牙控制 LED!
- 像素追逐游戏
- 使用 Arduino Uno 控制 LED 矩阵
- NeoMatrix Arduino Pong
- 使用 Arduino 测量太阳辐射
- 带 WS2812 LED 灯条的 DIY Arduino 1D 乒乓球游戏