

Arduino Sonar
组件和用品
 |
| × | 1 | |||
 |
| × | 1 |
关于这个项目
HC-SR04 的雷达屏幕可视化
Arduino 代码:
发送由发送到串行端口的伺服值移动的每一度的传感器读数,以供处理
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Arduino/Arduino_radar_server_arduino/Arduino_radar_server_arduino.ino
处理代码:
从俯视图绘制出 HC-SR04 所看到的区域。获取并显示 2 个读数,一个从左到右,一个从右到左。显示 2 个读数的平均值
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Processing-code/Arduino_radar_client_processing/Arduino_radar_client_processing.pde
欢迎任何问题!
Github:https://github.com/faweiz
投资组合:https://portfolium.com/faweiz
领英:https://www.linkedin.com/in/faweiz
代码
- 无标题文件
无标题文件Arduino
/*https://www.hackster.io/faweiz/arduino-radarRadar HC-SR04 的屏幕可视化发送传感器读数,由发送到串行端口的伺服值移动的每个度数由 Processing 拾取*/#include#include #define TRIGGER_PIN 2 // Arduino 引脚 2 连接到超声波传感器上的触发引脚。#define ECHO_PIN 3 // Arduino 引脚 3 连接到超声波传感器上的回波引脚。#define MAX_DISTANCE 150 // 我们想要 ping 的最大距离(以厘米为单位)。最大传感器距离为 400-500cm。#define SERVO_PWM_PIN 9 //将伺服设置为 Arduino 的引脚 9 // 表示 -angle ..angle#define ANGLE_BOUNDS 80#define ANGLE_STEP 1 int angle =0; // 伺服运动方向 // -1 =后退,1 =前进 int dir =1; Servo myservo;NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);无效设置(){ Serial.begin(9600); // 初始化串口:myservo.attach(SERVO_PWM_PIN); //将伺服设置为Arduino的引脚9} void loop() { delay(50); // 我们必须重新归一化为正值,因为角度来自 -ANGLE_BOUNDS .. ANGLE_BOUNDS // 并且伺服值必须为正 myservo.write(angle + ANGLE_BOUNDS); // 从传感器读取距离并发送到串行 getDistanceAndSend2Serial(angle); // 计算角度 if (angle>=ANGLE_BOUNDS || angle <=-ANGLE_BOUNDS) { dir =-dir; } 角度 +=(dir * ANGLE_STEP); } int getDistanceAndSend2Serial(int angle) { int cm =sonar.ping_cm(); Serial.print(角度,DEC); Serial.print(","); Serial.println(cm, DEC); }
代码
https://github.com/faweiz/My-Arduino/tree/master/arduino_radarArduino_radar_server_arduino.ino
Arduino_radar_client_processing.pde
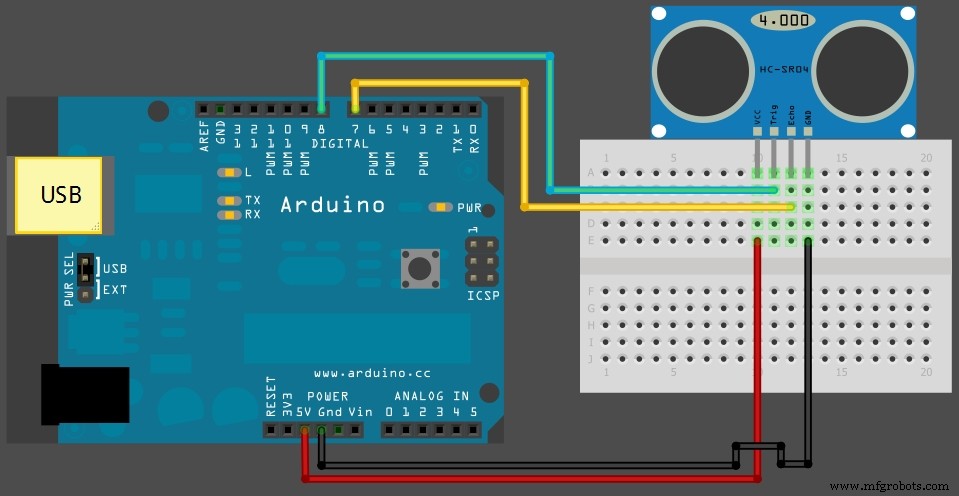
示意图
制造工艺