

7 了解惯性和惯性不匹配的资源
在为给定应用确定最合适的电机尺寸时,负载惯量和电机惯量等因素是关键的考虑因素。 (通过:了解惯性不匹配的奥秘)
如果联轴器、轴和皮带等机械部件具有无限刚性,则可以仅根据扭矩和速度要求来确定电机的尺寸。不幸的是,事实并非如此。
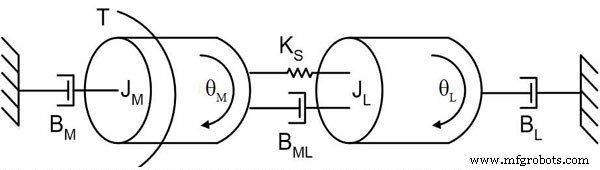
在一个柔顺耦合的电机和负载中,许多因素会影响系统的机械共振,包括电机的转子惯量(JM)、负载惯量(JL)、耦合弹性(K
这些机械组件中的每一个都有一定程度的柔顺性,这意味着当电机试图移动负载时,会以共振频率产生振动。成功的电机选型需要对惯性有一定的了解,所以让我们来看看一些关键概念。
惯性是任何物理对象对其速度的任何变化的抵抗力。随着惯性的增加,对加速/减速的阻力也随之增加。负载惯量,也称为转动惯量,定义为物理对象对其速度的任何变化的抵抗力,从旋转轴的角度来看 .
转动惯量(通常写成J ) 在伺服系统中可分为负载惯量和电机惯量两部分。转动惯量比是负载转动惯量除以电机转动惯量。惯量失配是指电机与负载之间物理惯量的差异。
为了帮助确定电机尺寸,电机制造商通常会提供允许的负载惯量信息。超过允许负载会导致性能下降、振动和失速。
请记住,没有计算某些理想惯性比的公式 - 必须为每个应用程序计算。
高负载与电机惯量比降低了机器的工作带宽,使电机工作得比应有的更辛苦,并且往往会导致稳定时间增加,从而导致减少整体表现。
降低惯量比的一种方法是使用齿轮箱,因为齿轮比对负载惯量有平方反比的影响。这可以实现更高速度的操作和/或更小、更便宜的电机。另一种方法是切换到具有更大惯性的更大电机。
此外,当今先进的伺服系统带有驱动控制算法,可用于解决共振效应,允许在某些应用中使用更高比率的系统。
可以通过更改材料、尺寸和设计(例如此处显示的“车轮”设计)来调整转子惯量。信用:A3
以下是探索惯性和惯性不匹配主题的 7 个有用资源:
- 了解惯性不匹配的奥秘:这篇来自 A3 档案的深入文章提供了该主题的详细细分,包括方程式。重点介绍惯性和耦合刚度如何共同导致伺服轴运行不稳定 - 以及如何解决此问题。
- 伺服电机选型基础知识:Yaskawa America 优秀的免费在线机器人相关在线学习模块系列包括该视频,涵盖了核心电机选型概念,例如峰值扭矩、RMS 扭矩、惯量比, 和速度。
- 机器人学院惯性视频:昆士兰科技大学的免费在线机器人学院提供多部视频,探讨不同运动控制和机器人技术环境中的惯性主题。
- 电机选型基础知识:负载惯性:领先电机制造商东方电机提供的惯性主题简明指南。
- 在线惯性比计算器:Destaco 提供了一个有用的在线工具,旨在帮助您计算惯性比。
- 了解惯量比及其对机器性能的影响:三菱电机的一份优秀白皮书,解释了惯量比的基本原理以及在确定电机尺寸时遵循粗略的经验法则的危险。
- 减少步进电机共振的解决方案:您是否知道通过调整电机和/或改变负载惯量可以减少步进电机共振?在 A3 档案中的这篇文章中了解更多信息。
工业机器人