

机器人欧拉角:基本入门
很难理解机器人的旋转,不是吗?欧拉角是脖子痛。这是消除痛苦的基本入门。
方向!他们只是让我想把头发扯下来。如果您曾经不得不使用坐标和旋转对机器人的最终姿势进行编程,那么您就会知道我在说什么。
乍一看,设置机器人末端执行器的姿势似乎很简单,不是吗?
您只需说“我想将机器人的工具移动到这个 位置,我希望它指向 this 方向。”
直观地说,您确切地知道您希望工具具有什么方向。然而,当谈到使用精确数字描述方向时,这个简单的任务突然变得一团糟。
为什么机器人的方向很难理解
很容易描述机器人工具的X、Y、Z(平移)坐标。
要描述翻译,您只需输入坐标 - 例如Point[X, Y, Z] =[100, 1000, 1500] mm — 假设您使用相同的基本参考,这只能参考一个位置。只能表示X轴100毫米,Y轴1米,Z轴1.5米。
但是,你如何描述工具的方向?
你可以说:
旋转[XYZ] =[5, 45, 15]°
但是,你同样可以说(四舍五入)
Rot[XY'Z”] =[-7.9, 44.7, 16.2]°
或
Rot[ZY'Z”] =[7.9, 45.2, 5.0]°
或偶数
四元数[q1-q4] =[0.9, -0.1, 0.4, 0.1]
所有这些都指的是完全相同的方向!
更令人费解的是,不同的机器人制造商使用不同的约定。即使您熟悉 3D 几何,这一切都会变得有点令人头疼。
问题:我们只是不循环思考
真正的问题是我们不自然地考虑旋转。
我们直观地理解平移坐标,因为我们在日常生活中使用它们(例如“它在第二个书架上,从左边算起四本书。” )。然而,当我们必须描述一个方向时,我们会用手指指向并说“它在那个方向。”
不幸的是,机器人需要比模糊的“它在那边”更精确的信息。
我们需要的是对欧拉角有扎实的理解。
什么是欧拉角?
让我们退后一步,从基础开始。
描述机器人方向最常用的方法是欧拉角。欧拉角由三个数字组成,每个数字描述围绕一个轴的旋转。根据旋转的顺序,有不同的欧拉角约定。
首先,让我们将其简化为单轴示例。
想象一个指南针。
通常世界的Z轴是指从天空延伸到地面的轴。因此,您可以将指南针上的指针想象为绕 Z 轴旋转(名为 Rot[Z])。当您将指南针平放在您面前并且箭头指向 135° 时,这意味着北在您的左肩上方,因此您当前面向东南。如果指南针的方向相同,则无论您将指南针放在哪里(地板上、头上等),角度始终为 135°。
到目前为止,很简单。
我们的指南针只有一个旋转值(即 Rot[Z]),但要描述任何 3D 方向,我们需要三个值。这就是它开始变得有点复杂的地方。
其他描述机器人方向的方法是四元数或姿势(4×4矩阵)。
让我们动手
从现在开始,拥有交互式视觉辅助工具将对您有所帮助。
我建议您在此链接下载 RoboDK 的免费副本,这样可以很容易地可视化参考帧并查看生成的坐标。
启动 RoboDK 并使用“添加参考框架”按钮或选择“程序”菜单中的选项来创建参考框架。您应该会在屏幕中间看到一个红色、绿色和蓝色的框。
您可以像这样旋转框架:按住 Alt 键,然后单击并拖动出现的弯曲箭头之一。
如何驾驶飞机 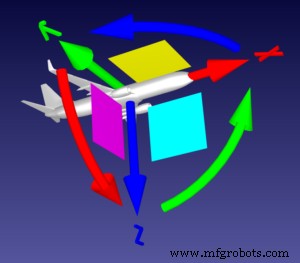
让我们使用飞机的类比,正如机器人论坛上非常清楚地描述的那样。
想象参考系是一个平面。笔直的红色箭头(X 轴)的尖端是其鼻锥的尖端,笔直的绿色箭头(Y 轴)是它的左翼。
在这种情况下,移动弯曲的箭头有以下作用:
- 弯曲的红色箭头 =Rot[X]:飞机的滚动,允许飞机绕其水平轴旋转。
- 弯曲的绿色箭头 =Rot[Y]:飞机的俯仰角,将鼻锥指向上方或下方。
- 弯曲的蓝色箭头 =Rot[Z]:飞机的Yaw,它决定了飞机的前进方向。
如果飞行员想让飞机逐渐左转和下转,那么飞机就不会只是在 Z 轴上旋转——这不是飞机的工作方式。
相反,飞机会:
- 将其鼻锥向下倾斜:Rot[Y]
- 将平面向左滚动:-Rot[X]
- 向左偏航:Rot[Z]
整个运动将被表示为Rot[XYZ]。尝试在 RoboDK 中自己移动框架,直到您对这些概念感到满意为止。
然后,双击主窗口左上方的框架名称,弹出“框架详情”面板。
一个方向,几个可能的旋转
使用 RoboDK,尝试以下任务。
在每个任务之前,通过打开“框架详细信息”面板中的“汉堡包”菜单图标(三个水平线)并选择“重置(设置身份)”来重置框架。
- 选择坐标顶部的下拉菜单,然后选择史陶比尔旋转(X->Y'->Z”)而不是通用。
- 旋转框架,使蓝色 (Z) 朝下,红色 (X) 朝后(即它们都从起始位置翻转,绿色 (Y) 与其起始位置相同),但只做所以通过绕 Y 轴旋转。
- 重置框架,然后再次将其移动到相同的旋转方向。但是,这次只使用 Z 旋转一次,然后 X 旋转一次。
- 重置框架,然后再次将其移动到相同的旋转方向。但是,这次只使用了一次 X 旋转,然后是一次 Z 旋转。
如您所见,实现相同方向的方法可能不止一种。
第一种方法我们可以称之为Rot[Y],因为它只包括绕Y轴的旋转。第二种方法我们可以称之为 Rot[Z, X'],因为它包括绕 Z 轴旋转一圈和绕新 X 轴旋转一圈。第三个我们称之为Rot[X, Z']。撇号表示旋转是相对于最后一个运动而不是静态轴发生的。

这是欧拉角背后的基本概念。您可以通过改变轴和旋转的顺序以多种方式将框架旋转到相同的方向。
不同的机器人制造商选择了不同的旋转组合。例如,Stäubli 使用 XY'Z” 约定,Adept 使用 ZY'Z” 约定,KUKA 使用 ZY'X” 约定,Fanuc &Motoman 使用 XYZ 约定。另一方面,ABB 使用四元数,Universal Robots 使用方向向量。但是所有的约定都可以用来表示空间中的任何方向。

您可以在 RoboDK 的文档中找到更多信息。
测试不同的机器人约定
希望这开始有意义了。然而,这仅仅是开始。要真正掌握 RoboDK 中的欧拉角约定,我发现按照本指南使用软件很有用。
您可以在“Frame Details”面板中的浅蓝色、紫色和黄色方框中看到数字旋转的效果。
默认情况下,为新参考框架选择通用 XYZ 约定。尝试从彩色框上方的下拉菜单中选择不同的机器人制造商。尝试在方框中输入数值,看看它们对参考系的影响。
关于欧拉角的深入教程,我也可以推荐Mecademic上的这个页面。
工业机器人