

离线编程的 10 大任务
你的任务适合离线编程吗?我们来看看离线编程软件可以完成的 10 大机器人任务。
对任何新技术的共同关注都包含在“但它是否适用于我的独特情况?”的问题中
离线编程也不例外。尽管人们很快就看到了它的好处,但他们有时担心它不适用于他们的特定任务。我们理解他们的担忧。每个人的业务都是独一无二的,很难判断离线编程等技术是否最适合您。
但是,尽管您的情况很独特,但您的机器人应用程序与我们一直看到的其他应用程序之间存在相似之处。离线编程可用于许多机器人任务。
在本文中,我们解释了哪些因素决定了您是否可以使用离线编程,并列出了 RoboDK 中的前 10 项任务。
什么决定了一个任务是否可以使用离线编程
如果您可以使用机器人执行任务,您几乎可以肯定使用离线编程对其进行编程。然而,有几个因素决定了编程的难易程度。
五个重要因素是:
- 软件功能—— 并非所有离线编程软件都是一样的。某些软件包由特定的机器人制造商提供,因此被锁定在这些品牌中,并且对某些任务有不同的支持。
- 机器人兼容性 — 有的厂家不提供离线编程软件,如果依赖厂家软件,就会出现问题。有关如何评估您的机器人的提示,请参阅我们的文章:离线编程是否适用于我的机器人?
- 机器人模型的可用性—— 您需要确保您的机器人模型可用于您正在使用的离线编程软件。请参阅我们的机器人库,了解来自 30 多家机器人制造商的 300 多种型号。
- 专业水平 — 一些传统类型的离线编程(例如在汽车行业)涉及复杂的软件工具,不易使用。另一方面,像 RoboDK 这样的软件可以很容易地离线编程你的机器人。因此,与过去相比,您需要的专业知识要少得多。
选择合适的离线编程软件可以克服这些因素中的大部分。
离线编程的 10 大任务
我们经常看到人们使用离线编程来实现相同或相似的任务。为了让您的生活更轻松,我们整理了一份最常见任务的列表,以及如何使用离线编程来实现它们的说明。
您可以在我们的示例页面上找到有关如何在 RoboDK 中对这些任务进行编程的交互式模拟和教程。
1。机器人加工
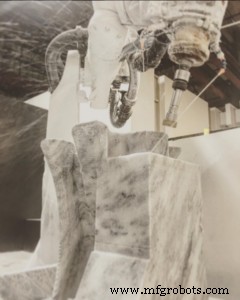
过去,自动化铣削和加工往往由 CNC 机床完成。如果涉及机器人,它们通常只用于机器照料。
然而,如今机器人开始被用于加工本身。提高工业机器人的准确性和更直观的离线编程意味着您可以轻松地将 CNC 代码转换为机器人指令。
RoboDK 在其实用程序菜单中包含一个专用的机器人加工工具。在此链接中查看演示:RoboDK Machining。
2。拾取和放置
可能最流行的机器人任务是拾取和放置,这涉及将对象从工作单元的一个部分移动到另一个部分。使用离线编程很容易对此类任务进行编程。正如我在之前的文章中所演示的,可以在 15 分钟内编写一个简单的拾放任务。
在此链接查看演示:RoboDK Pick and Place。
3。机器人绘画
如果你让任何公众说出一些工业机器人任务,我敢打赌机器人绘画会在他们的名单上名列前茅。绘画是最典型的机器人应用程序之一,使用离线编程很容易做到。该软件可以在几分钟内生成刀具路径。

在此链接查看演示:RoboDK 绘画。
4。机器人点焊
离线编程长期以来一直用于生成点焊程序。然而,在过去,这需要花费大量时间进行艰苦的模拟,并且需要专业的程序员。使用更新的软件,可以轻松生成点焊程序,不会出错。
在此链接查看演示:RoboDK Spot Welding。
5。 3D 打印
我想说 3D 打印是 21 世纪的标志性技术之一。尽管它已经存在了一段时间,但 3D 打印应用在过去十年中呈爆炸式增长。最近最有趣的发展之一是将机器人本身用作 3D 打印机。离线编程让这很容易实现。

RoboDK 在其实用程序菜单中包含一个专用的 3D 打印工具。在此链接查看演示:RoboDK 3D 打印。
6。传送带拣选
许多行业都使用输送机在不同的增值过程之间运输物体。然而,它们通常难以与机器人集成。如果您的离线编程软件支持它们(如 RoboDK 那样),它可以为您节省大量在线集成时间。

在此链接查看演示:RoboDK Conveyor Picking。
7。自动检测
使用机器视觉进行检查已成为机器人的流行应用。原因很明显——人工检查是一项艰巨的任务,随着生产力的提高而增加。机器视觉的离线编程永远无法完全取代在线编程(因为您需要使用真实图像训练相机),但它可以帮助加快集成过程。

在此链接查看演示:RoboDK 自动检测.
8。绘图
对于机器人来说,绘画可能听起来像是一项无聊的活动。但是,它有许多有用的应用。机器人可用于在蛋糕上绘制糖霜图案,使用铣削工具切割艺术轮廓,并在产品上以手写方式绘画。离线编程可以轻松将 SVG 图像(矢量成像的标准)转换为机器人路径。
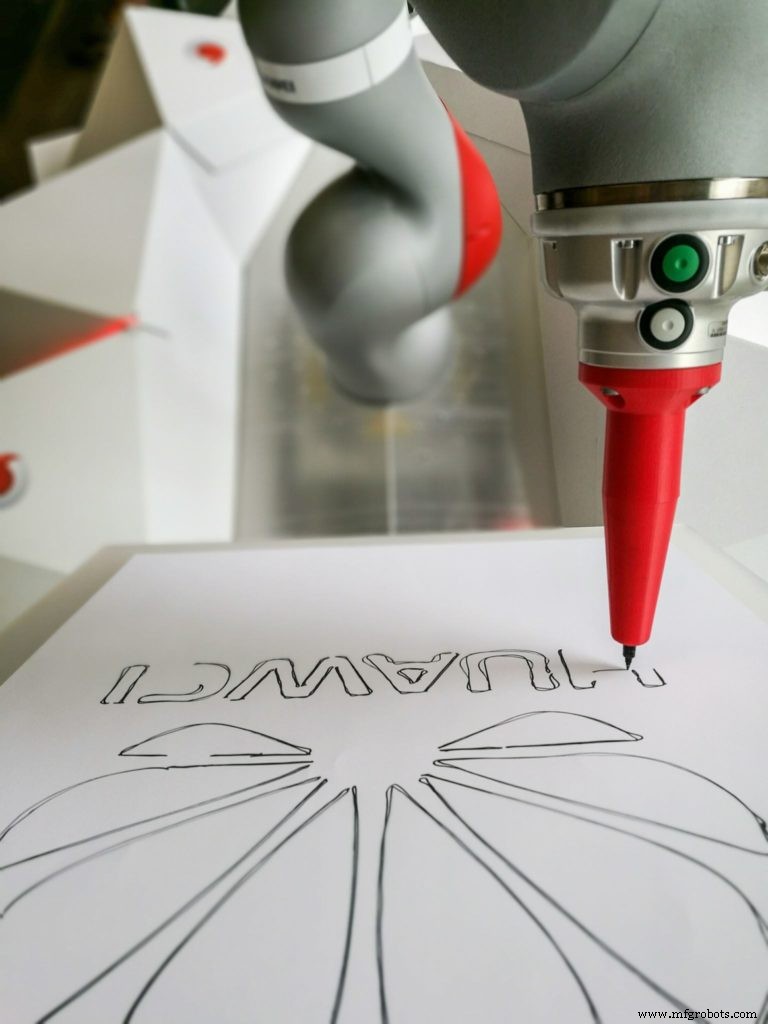
在此链接查看演示:RoboDK 绘图。
9。集成外轴
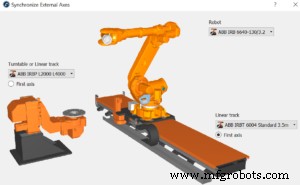
这本身并不是一个真正的“任务”。它更像是一种提高机器人可以完成的任务范围的技术。外轴允许您扩展机器人的工作空间以完成涂漆、点焊、检查等任务。它们基本上是附加到机器人上的额外一到两个自由度。唯一的问题是它们需要与机器人同步。通过离线编程,这种同步很容易。
RoboDK 在其 Utilities 菜单中包含一个专用的外轴同步工具。在此链接中查看演示:RoboDK Machining With External Axis。
10.机器人能做的任何事情……OLP 也能做
即使你的任务没有在这里列出,很可能你也可以通过离线编程来实现。如果您不确定,请随时与我们联系并询问我们您的特定任务,或在下方发表评论。
开始使用离线编程的最佳方式就是下载软件并亲自试用。在此链接下载免费试用版:下载 RoboDK。
工业机器人