

计算电路
当有人提到“计算机”这个词时,通常会想到数字设备。数字电路以二进制表示数字量 格式:1 和 0 的模式,由大量在饱和或截止状态下工作的晶体管电路表示。然而,模拟电路也可以用来表示数值和进行数学计算,通过使用可变电压信号而不是离散的开/关状态。
这是二进制(数字)表示与数字“二十五”的模拟表示的简单示例:
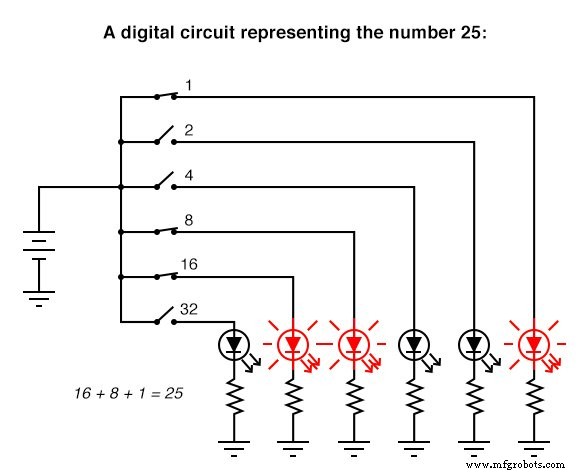
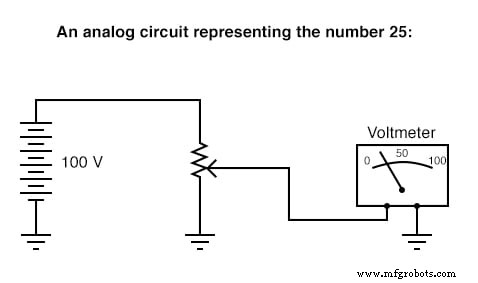
数字电路与建立在模拟原理上的电路大不相同。数字计算电路可能非常复杂,计算通常必须按顺序“步骤”进行才能获得最终答案,就像人类用铅笔和纸分步进行算术计算一样。另一方面,模拟计算电路相比之下非常简单,并且以连续、实时的方式执行计算。但是,使用模拟电路来表示数字有一个缺点:不精确。上面显示的数字电路准确地表示数字 25。上面显示的模拟电路可能会也可能不会精确校准到 25.000 伏,但会受到“漂移”和误差的影响。
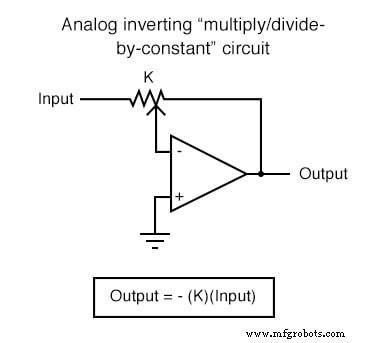
在精度不重要的应用中,模拟计算电路非常实用和优雅。此处显示了一些用于执行模拟计算的运算放大器电路:
计算运算放大器电路
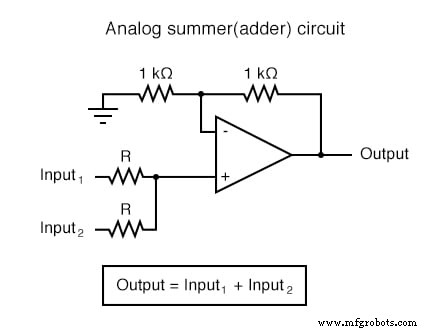
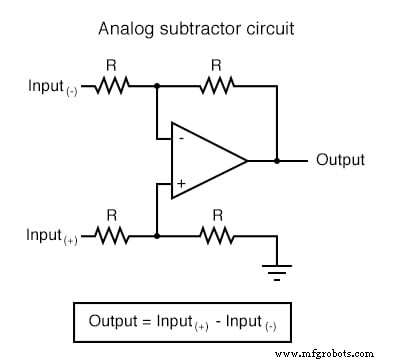
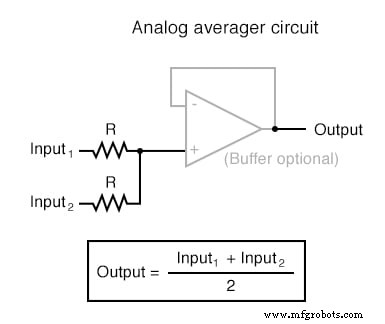
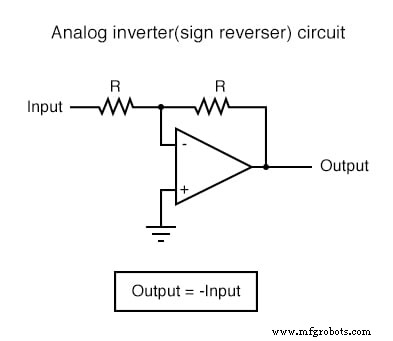
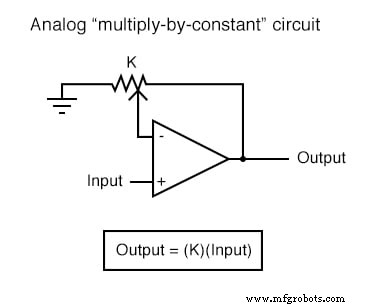
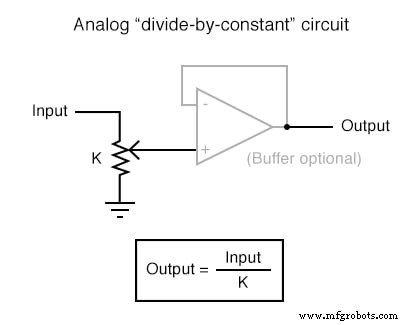
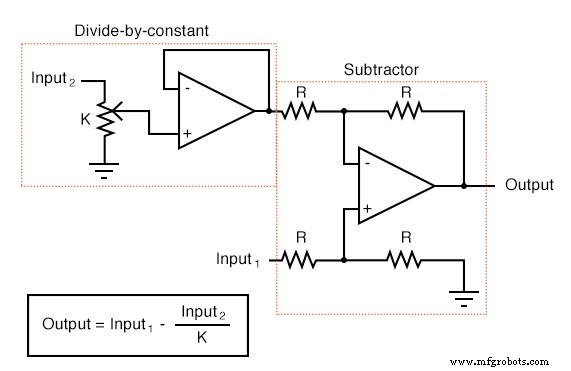
这些电路中的每一个都可以模块化方式使用以创建能够进行多次计算的电路。例如,假设我们需要从另一个变量中减去一个变量的某个部分。通过将分频器电路与减法器电路相结合,我们可以获得所需的功能:
称为模拟计算机的设备 过去在大学和工程车间很常见,在那里可以用可拆卸的跳线将数十个运算放大器电路“拼凑”在一起,以模拟数学陈述,通常是为了模拟一些已知基本方程的物理过程。数字计算机使模拟计算机几乎过时了,但就必要组件的绝对优雅和经济而言,模拟计算电路无法被数字击败。
模拟计算电路擅长执行微积分运算积分 和差异化 关于时间,通过在运算放大器反馈回路中使用电容器。但是,要充分理解这些电路的操作和应用,我们必须首先掌握这些基本微积分概念的含义。幸运的是,运算放大器电路在涉及微积分的实际问题中的应用是教授基本微积分的极好方法。用 John I. Smith 的话,摘自他出色的教科书 Modern Operational Circuit Design :
“给某些读者一个鼓励:积分是运算[放大器]电路所利用的数学学科之一,并且在此过程中,它作为理解的障碍而被拆除。” (第 4 页)
史密斯先生对模拟电路作为数学学习工具的教学价值的看法并非独一无二。考虑工程师 George Fox Lang 在他为 2000 年 8 月号Sound and Vibration 杂志撰写的一篇文章中的观点 , 标题为“模拟是 not 计算机商标!”:
“创建由一组特定方程控制的真实物理实体(电路)并与之交互,可以提供对这些数学陈述的独特见解。没有比体验这种相互作用更好的方法来培养物理和数学之间相互作用的“直觉”。模拟计算机是一种强大的跨学科教学工具;各个领域的许多教育工作者都在哀悼它的过时。” (第 23 页)
微分是初学微积分的学生通常学习的第一个运算。简而言之,微分是确定一个变量与另一个变量相关的瞬时变化率。在模拟微分电路中,自变量是时间,因此我们处理的变化率是电子信号(电压或电流)相对于时间的变化率。
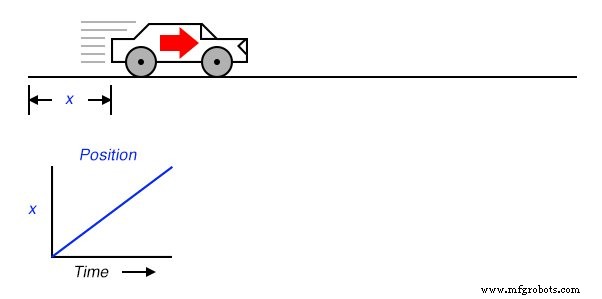
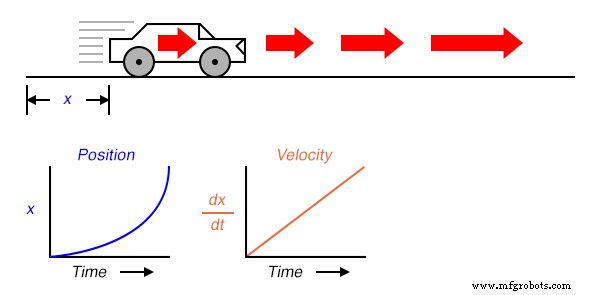
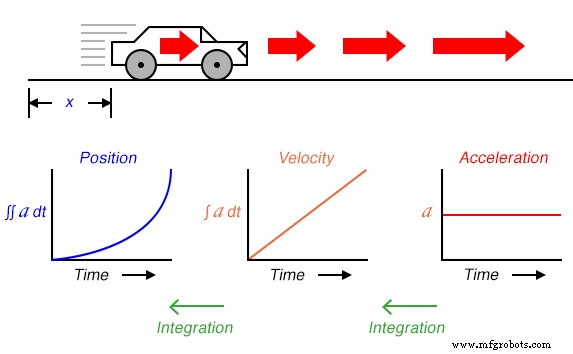
假设我们要测量一辆汽车的位置,它从起点开始沿直线行驶(没有转弯)。让我们称之为测量,x .如果汽车以一定的速度移动,使其与“起点”的距离随时间稳步增加,则其位置将在图形上绘制为线性 函数(直线):
如果我们要计算导数 汽车相对于时间的位置(即确定汽车位置相对于时间的变化率),我们将得出一个代表汽车速度的量。微分函数用分数表示法d/d , 所以当区分位置 (x ) 相对于时间 (t ),我们将结果(导数)表示为 dx/dt :
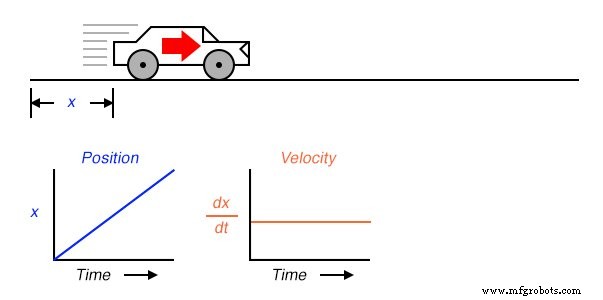
对于 x 的线性图 随着时间的推移,位置的导数 (dx/dt ),否则通常称为 velocity , 将是一条平坦的线,价值不变。数学函数的导数可以图形化地理解为它的斜率 当绘制在图形上时,在这里我们可以看到位置 (x ) 图有一个恒定的斜率,这意味着它的导数 (dx/dt ) 必须随时间保持不变。
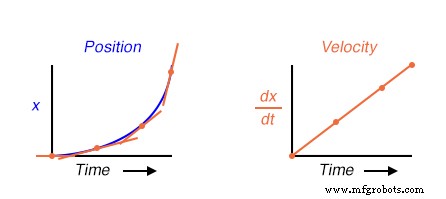
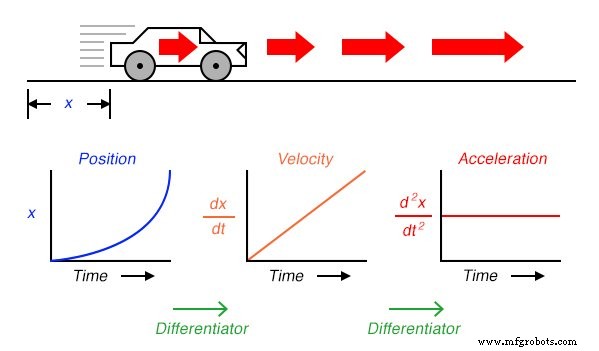
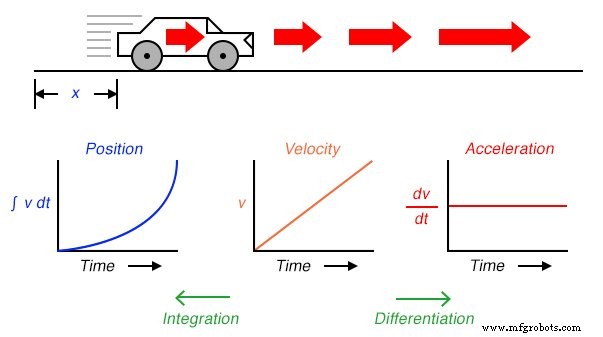
现在,假设汽车行驶的距离随时间呈指数增长:也就是说,它以缓慢的运动开始行驶,但随着时间的推移,每经过一段时间,行驶的距离就会增加。然后我们会看到位置的导数 (dx/dt ),也称为速度 (v ),不会随着时间的推移保持不变,但会增加:
速度图上点的高度对应于位置图上相应时间点的变化率或斜率:
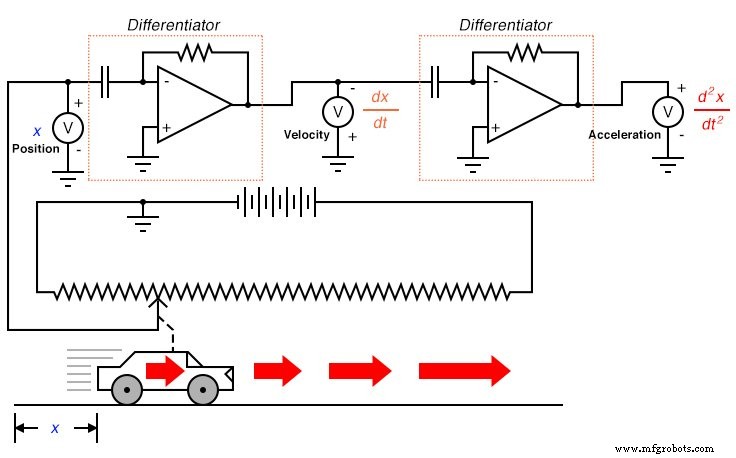
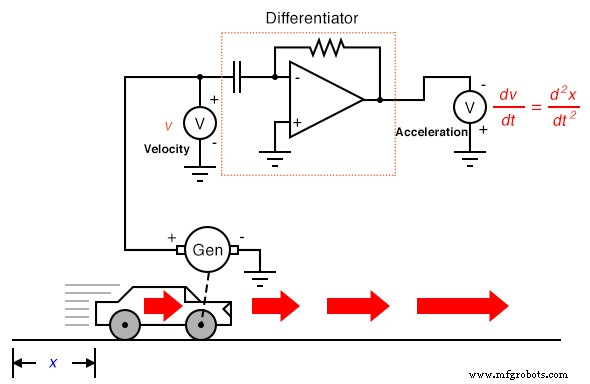
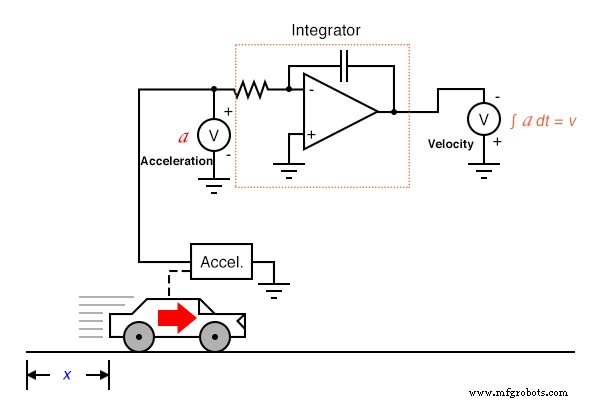
这与模拟电子电路有什么关系?好吧,如果我们有一个代表汽车位置的模拟电压信号(想想一个巨大的电位计,它的雨刮器连接到汽车上,产生与汽车位置成正比的电压),我们可以将一个微分电路连接到这个信号上并得到电路不断计算 汽车的速度,通过连接到微分电路输出端的电压表显示结果:
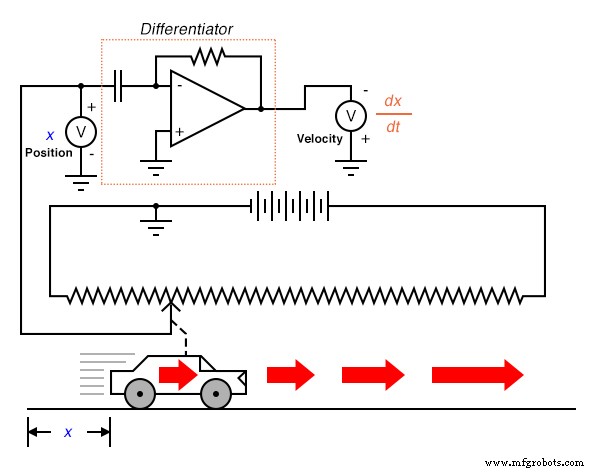
回忆上一章,微分电路输出的电压与输入电压随时间的变化率成正比 (d/dt )。因此,如果输入电压以恒定的速率随时间变化 ,输出电压将处于恒定值。如果汽车以这样一种方式移动,即随着时间的推移,其经过的距离以稳定的速度增加,那么这意味着汽车以恒定速度行驶,微分电路将输出与该速度成正比的恒定电压。如果汽车经过的距离以非稳定方式随时间变化,微分器电路的输出也将不稳定,但始终处于代表输入随时间变化率的水平。
请注意,电压表记录速度(在微分器电路的输出端)以“反向”极性连接到运算放大器的输出端。这是因为所示的微分器电路反相 :针对正输入电压变化率输出负电压。如果我们希望电压表记录速度的正值,则必须将其连接到运算放大器,如图所示。尽管将巨大的电位器连接到汽车等移动物体可能不切实际,但概念应该很清楚:通过对表示位置的信号以电子方式执行微分函数,我们可以获得表示速度的信号。
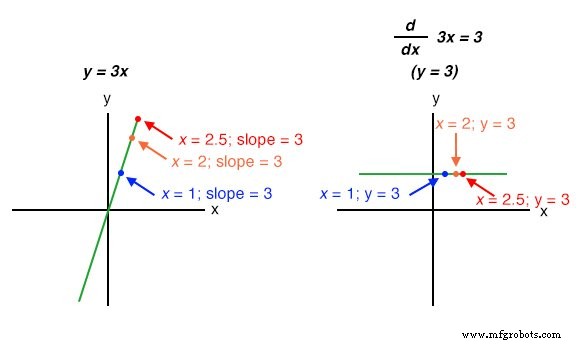
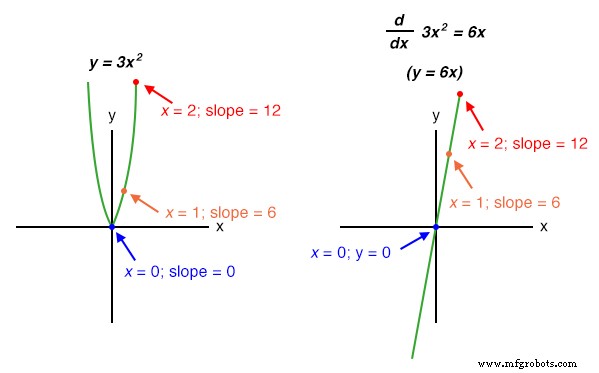
初学微积分的学生学习微分的符号技术。然而,这要求描述原始图形的方程是已知的。例如,微积分学生学习如何取函数,例如 y =3x 并求其关于 x 的导数 (d/dx ), 3 ,简单地通过操纵方程。我们可以通过比较两个函数的图形来验证这种操作的准确性:
非线性函数,例如 y =3x 2 也可以通过象征方式来区分。在这种情况下,y =3x 2 的导数 关于x 是 6x :
然而,在现实生活中,我们通常无法通过像 y =3x 这样的简单方程来描述任何物理事件的行为。 ,因此微积分学生学习的符号微分类型可能无法应用于物理测量。如果有人想确定我们假设的汽车位置的导数 (dx/dt =速度)通过符号方式,他们首先必须根据从真实实验中获取的位置测量值,获得描述汽车随时间变化的位置的方程——这几乎是不可能完成的任务,除非汽车在严格控制的条件下运行,从而导致一个非常简单的方法位置图。然而,一个模拟微分器电路,通过利用电容器在电压、电流和时间方面的行为i =C(dv/dt) , 自然地将任何与时间相关的真实信号微分,并能够输出与瞬时速度相对应的信号 (dx/dt ) 任何时候。通过使用图表记录器或其他数据采集设备记录汽车的位置信号以及微分器的输出信号,这两个图表自然会呈现出来以供检查和分析。
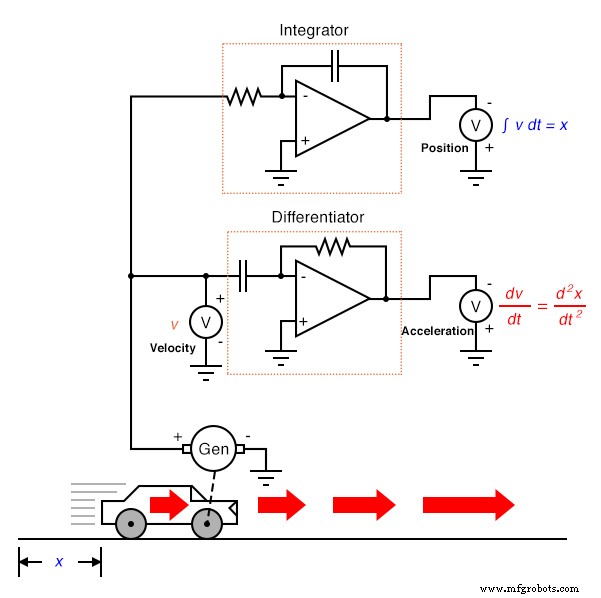
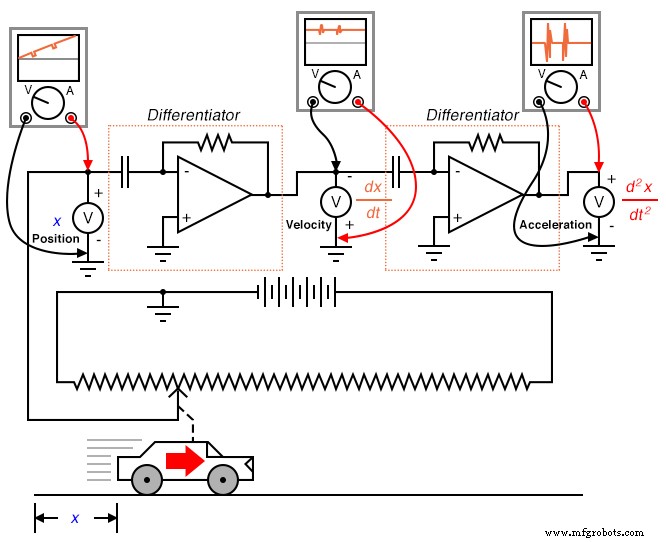
我们可以通过使用另一个微分器电路将微分原理应用到速度信号上,从而进一步采用微分原理。换句话说,用它来计算速度的变化率,我们知道它是位置的变化率。如果我们这样做,我们将达到什么实际措施?根据我们用来测量位置和速度的单位来考虑这一点。如果我们要以英里为单位测量汽车从起点开始的位置,那么我们可能会以英里每小时为单位表示它的速度 (dx/dt )。如果我们将速度(以每小时英里数衡量)与时间相区分,我们最终会得到每小时英里数每小时 .介绍性物理课程向学生教授下落物体的行为,以米为单位测量位置 ,以米每秒为单位的速度 ,以及速度随时间的变化(以米每秒,每秒为单位) .最后一项措施称为加速度 :速度随时间的变化率:
表达式d 2 x/dt 2 被称为二阶导数 位置 (x ) 关于时间 (t )。如果我们将第二个微分电路连接到第一个的输出,最后一个电压表将记录加速度:
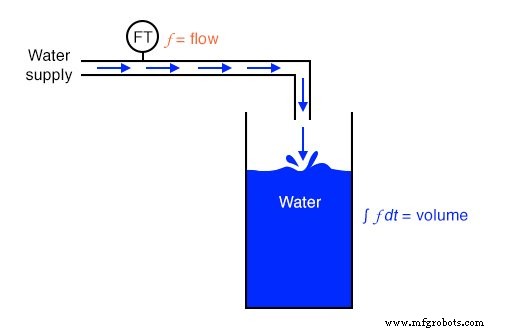
从位置推导出速度,从速度推导出加速度,我们可以非常清楚地看到微分原理。这些并不是唯一以这种方式相互关联的物理测量,但它们也许是最常见的。微积分的另一个例子是液体流动之间的关系 (q ) 和液体体积 (v ) 随时间累积在容器中:
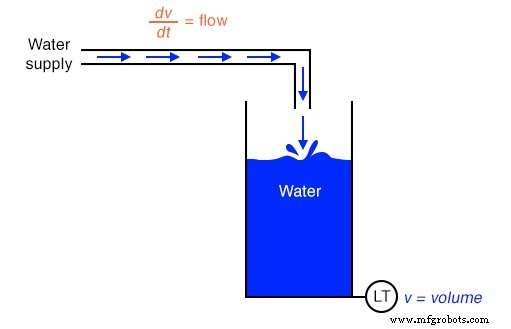
安装在储水箱上的“液位变送器”设备提供与水箱中水位成正比的信号,如果水箱在其整个高度的横截面积恒定,则直接等于存储的水量。如果我们将这个音量信号与时间(dv/dt ),我们将获得与水流速成比例的信号 通过管道将水输送到水箱。以接收该体积信号的方式连接的微分器电路将产生与流量成比例的输出信号,可能替代安装在管道中的流量测量装置(“流量变送器”)。
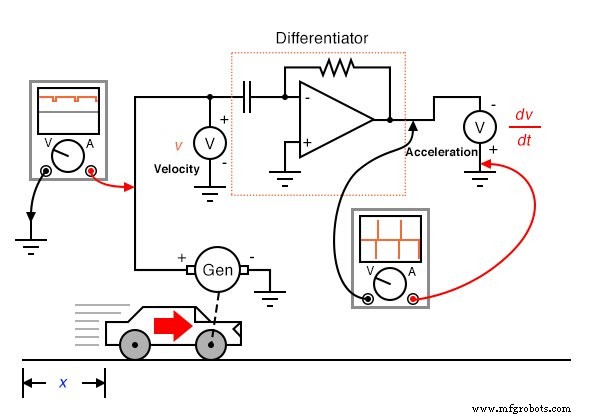
回到汽车实验,假设我们假设的汽车在一个车轮上配备了测速发电机,产生与速度成正比的电压信号。我们可以用一个电路区分信号以获得加速度,如下所示:
就其本质而言,测速发电机根据时间区分汽车的位置,产生与车轮角位置随时间变化的速度成正比的电压。这为我们提供了一个已经代表速度的原始信号,只需要一步微分即可获得加速度信号。测速发电机测量速度当然是比测量其物理位置的巨型电位器更实用的汽车仪表示例,但是我们在实用性中获得的东西在位置测量中失去了。无论我们微分多少次,我们都无法从速度信号中推断出汽车的位置。如果微分过程使我们从位置到速度再到加速度,那么我们需要以某种方式执行微分的“反向”过程以从速度到位置。这样的数学过程确实存在,它被称为积分 . “积分器”电路可用于执行这种关于时间的积分功能:
回忆上一章,积分电路输出的电压随时间的变化率与输入电压的幅度成正比。因此,给定一个恒定的输入电压,输出电压将变化 以恒定的速率 .如果汽车以恒定速度行驶(从测速发电机向积分器电路输入恒定电压),那么它行驶的距离将随着时间的推移稳步增加,积分器将输出一个与该距离成正比的稳定变化的电压。如果汽车的速度不是恒定的,那么积分电路的输出随时间的变化率也不会变化,但输出电压会 忠实地代表汽车在任何给定时间点行驶的距离。
积分符号看起来像一个非常窄的草书字母“S”(∫)。利用这个符号的方程 (∫v dt =x ) 告诉我们我们正在积分速度 (v ) 关于时间 (dt ),并获取位置 (x ) 结果。
因此,我们可以用速度 (v ) 就像我们在位置 (x ):
如果我们在汽车上安装了一个加速度计,产生一个与加速度或减速度成正比的信号,我们可以(假设)通过一步积分获得速度信号,并通过第二步积分获得位置信号:
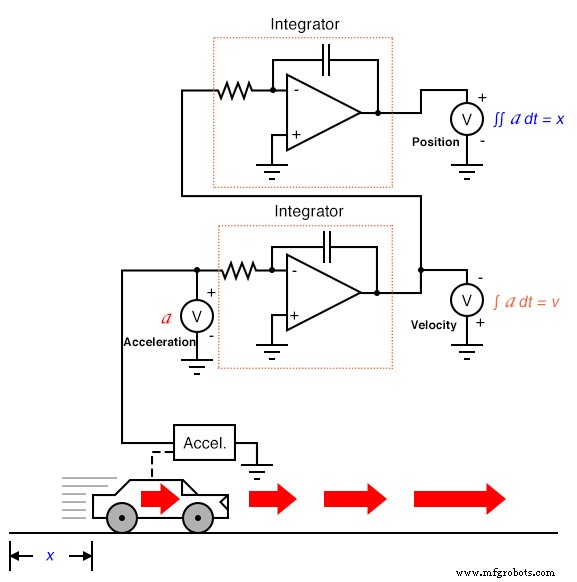
因此,汽车运动的所有三个度量(位置、速度和加速度)都可以用加速度表示:
正如您可能怀疑的那样,集成过程也可以在其他物理系统中说明并应用于其他物理系统。以前面显示的储水箱和流量示例为例。如果流量是导数 相对于时间的罐体积 (q =dv/dt ),那么我们也可以说体积是积分 相对于时间的流速:
如果我们使用“流量变送器”设备来测量水流量,那么通过时间积分,我们可以计算出水箱中随时间累积的水量。虽然理论上可以使用电容运算放大器积分器电路从流量信号中导出体积信号,但机械和数字电子“积分器”设备更适合长时间积分,并且经常在水中使用处理和分配行业。
正如有区分的符号技术一样,也有用于整合的符号技术,尽管它们往往更加复杂和多样。然而,将符号积分应用于诸如汽车加速度之类的现实世界问题仍然取决于精确描述测量信号的方程的可用性——通常很难或不可能从测量数据中推导出来。然而,电子积分器电路连续、实时地执行这个数学函数,并且任何 输入信号配置文件,从而为科学家和工程师提供强大的工具。
话虽如此,但使用微积分技术从另一种类型导出一种类型的度量时有一些注意事项。微分具有放大被测变量中发现的“噪声”的不良趋势,因为噪声通常表现为比被测变量高得多的频率,而高频本质上具有随时间的高变化率。
为了说明这个问题,假设我们要从带有磨损的电刷或换向器条的测速发电机获得的速度信号中推导出汽车加速度的测量值。电刷和换向器之间接触不良的点会在测速发电机的输出电压中产生瞬时“下降”,连接到它的微分电路会将这些下降解释为速度的快速变化。对于匀速行驶的汽车——既不加速也不减速——加速度信号应该是 0 伏,但是测速发电机故障引起的速度信号中的“噪声”会导致微分(加速度)信号包含“尖峰”,错误地表明短暂的高加速和减速:
存在于要微分的信号中的噪声电压不必具有很大的幅度即可引起问题:所需要的只是噪声曲线具有快速的上升或下降时间。换句话说,任何具有高 dv/dt 微分时,即使幅度很小,分量也会有问题。
应该注意的是,这个问题不是模拟电路的人工制品(测量/计算仪器的特殊误差);相反,它是分化过程所固有的。无论我们如何进行微分,速度信号中的“噪声”总是会破坏输出信号。当然,如果我们对信号进行两次微分,就像我们从位置信号中获得速度和加速度一样,第一个微分电路输出的放大噪声信号将被下一个微分电路再次放大,从而使问题更加复杂:
积分不会遇到这个问题,因为积分器充当低通滤波器,衰减高频输入信号。实际上,随着时间的推移,由信号上的噪声引起的所有高峰值和低峰值都被平均在一起,从而减少了净结果。那么,人们可能会认为,我们可以通过直接测量加速度并对该信号进行积分以获得速度来避免所有麻烦;实际上,与之前所示的方式“相反”计算:
不幸的是,遵循这种方法可能会导致我们遇到其他困难,其中一个是称为漂移的模拟积分器电路的常见问题 .所有运算放大器都有一定量的输入偏置电流,除了输入电压信号导致的任何电荷积累之外,该电流还会导致电荷在电容器上积累。换句话说,即使在绝对没有电压输入的情况下,所有模拟积分器电路都有其输出电压“漂移”或“蠕变”的趋势,结果随着时间的推移积累了误差。此外,由于内部电阻,不完美的电容器会随着时间的推移而失去其存储的电荷,从而导致向零输出电压“漂移”。这些问题是 模拟电路的伪影,可以通过使用数字计算来消除。
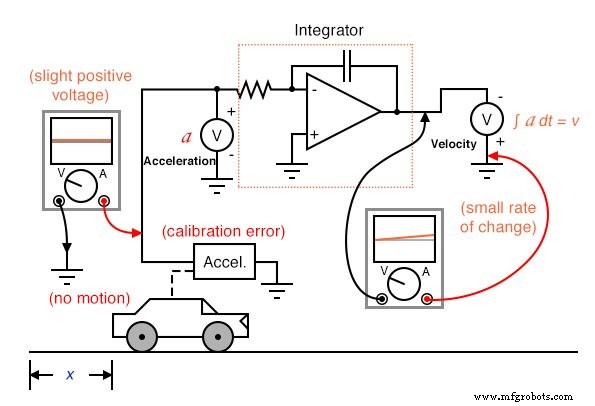
尽管存在电路伪影,但由于积分的工作方式,将一种测量(例如加速度)积分以获得另一种(例如速度)可能会导致误差。如果原始信号传感器的“零”标定点不完美,即使在不应该输出的情况下,它也会输出轻微的正或负信号。考虑一辆加速度计校准不完善的汽车,或者受重力影响以检测与汽车运动无关的轻微加速度的汽车。即使是完美的积分计算机,这种传感器误差也会导致积分器累积误差,导致汽车在不加速或不减速时输出指示速度变化的信号。
与微分一样,如果将积分信号传递到另一个积分器电路,该误差也会自行增加,因为第一个积分器的“漂移”输出很快就会为下一个积分器积分提供显着的正或负信号。因此,积分传感器信号时应注意:如果传感器的“零”调整不完美 ,即使积分电路本身是完美的,积分结果也会漂移。
到目前为止,唯一讨论的积分误差本质上是人为的:源于电路和传感器的缺陷。集成过程本身也存在一个固有的误差源,那就是未知常数 问题。初学微积分的学生知道,每当一个函数被积分时,都存在一个未知常数(通常表示为变量C ) 添加到结果中。这种不确定性最容易通过比较几个仅通过添加一个常数值而不同的函数的导数来理解:
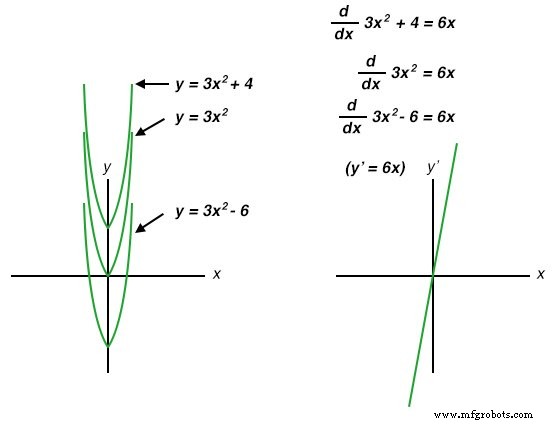
注意每条抛物线 (y =3x 2 + C ) 共享完全相同的形状,在垂直偏移方面彼此不同。然而,它们都共享完全相同的导数函数:y’ =(d/dx)( 3x 2 + C) =6x ,因为它们都具有相同的变化率 (斜率)沿 x 的相应点 轴。虽然从微分(不同方程共享一个公共导数)的角度来看这似乎是很自然和预期的,但从积分的角度来看,它通常会让初学者感到奇怪,因为对于函数的积分有多个正确的答案。从一个方程到它的导数,只有一个答案,但是从那个导数回到原始方程,我们会得到一系列正确的解。为了纪念这种不确定性,积分的符号函数称为不定积分 .
当积分器根据时间对实时信号进行积分时,输出是随时间积分的输入信号和的总和 一个任意大小的初始值,代表积分器在积分开始时的预先存在的输出。例如,如果我对远离城市的直线行驶的汽车的速度进行积分,计算在 2 小时内以每小时 50 英里的恒定速度将产生距离 (∫v dt ) 100 英里,这并不一定意味着汽车在 2 小时后距离城市 100 英里。它只告诉我们汽车将进一步行驶 100 英里 开车2小时后离开市区。行驶2小时后与市区的实际距离取决于整合开始时汽车与市区的距离。如果我们不知道这个距离的初始值,我们就无法确定汽车在行驶 2 小时后到城市的确切距离。
当我们将加速度相对于时间积分以获得速度时,也会出现同样的问题:
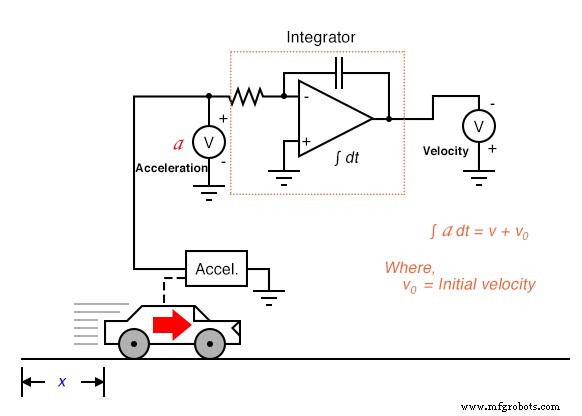
在这个积分器系统中,计算的汽车速度只有在积分器电路初始化时才有效 当汽车静止时输出值为零 (v =0)。否则,积分器很可能会输出速度的非零信号 (v0 ) 当汽车静止时,加速度计无法区分静止状态(每小时 0 英里)和匀速状态(例如每小时 60 英里,不变)之间的区别。积分器输出的这种不确定性是积分过程所固有的,而不是电路或传感器的人工制品。
总之,如果任何物理测量都需要最大精度,最好直接测量该变量,而不是从其他测量中计算出来。这并不是说计算没有价值。恰恰相反,它通常是获得所需测量值的唯一实用方法。然而,为了获得精确的测量结果,必须理解和尊重计算的限制。
相关工作表:
- 线性计算电路工作表
工业技术