

伺服电机初学者教程 - Electronicsloves.com
伺服电机也广泛用于机器人领域与工业一样,伺服是当今机器人项目的核心,如机械臂、遥控车、雷达盘、传送带、天线定位、相机自动对焦、打印过程等。
在许多爱好项目中,伺服电机被广泛使用。我希望这篇文章能够为您提供伺服的简要信息,伺服电机的基本工作原理,不同种类的伺服,伺服电机与普通直流电机的基本比较。

伺服电机定义:
“ 它是一种在响应负反馈时调节运动以响应命令提供运动的设备。 “
伺服的主要特点是精确控制其轴的位置。它基本上是一个闭环系统(即负反馈)。
伺服闭环系统主要有四个部分:
- 直流电机。
- 控制电路。
- 齿轮。
- 位置反馈传感器。
伺服电机的主要部分是小型直流电机。这些直流电机具有高速(即高 RPM)和非常低的扭矩(即负责做功的扭力)。基本上,小型直流电机的速度非常高,但扭矩并不高(即力小,距离大)。但是伺服内部的齿轮设计将直流电机的这种高速和低扭矩转换为更慢的速度和更高的扭矩(即小距离,更大的力)。
许多直流电机在 5000 RPM 左右速度更快,但齿轮会将这个非常高的 RPM 降低到大约 60 RPM 和高扭矩。价格低廉的伺服器的齿轮由塑料制成,以使其重量更轻且成本更低,而专为较重工作(即非常高的扭矩)而设计的伺服器的齿轮由金属制成,例如工业中使用的伺服器.
当第一次通过输入线向伺服器供电时,直流电机旋转到非常高的RPM和非常小的扭矩,但由于齿轮,伺服器的轴变慢了。
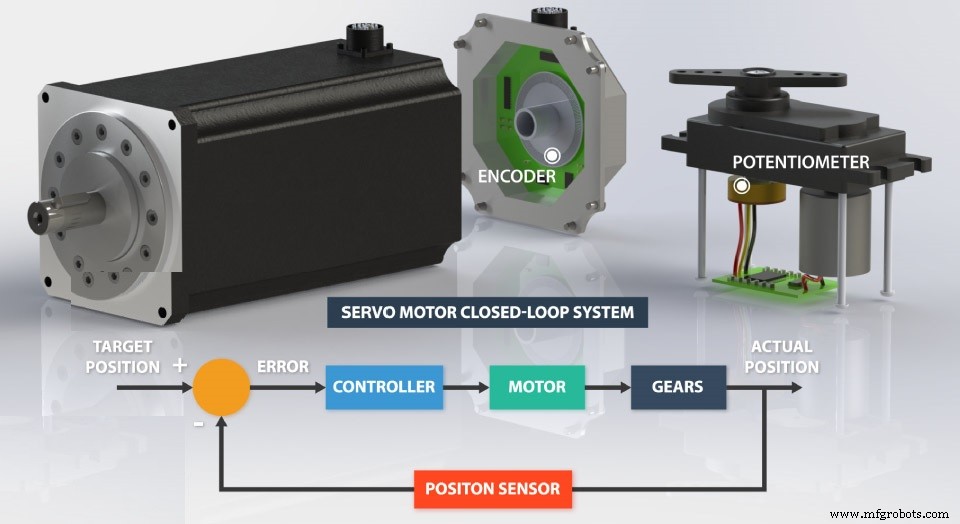 由于位置反馈传感器以负反馈布置连接,以便精确控制伺服的位置所需的位置。在工业伺服中,位置反馈传感器是高精度编码器,但在爱好中,伺服的位置传感器是电位器。最后齿轮上的位置传感器(即电位器)连接到包含误差检测器的电路(即,该误差检测器基本上是一个比较器,它比较两个信号,一个来自输入线,也称为目标位置,另一个来自输出通过电位器(也称为实际位置)和板上嵌入的控制器 IC。
由于位置反馈传感器以负反馈布置连接,以便精确控制伺服的位置所需的位置。在工业伺服中,位置反馈传感器是高精度编码器,但在爱好中,伺服的位置传感器是电位器。最后齿轮上的位置传感器(即电位器)连接到包含误差检测器的电路(即,该误差检测器基本上是一个比较器,它比较两个信号,一个来自输入线,也称为目标位置,另一个来自输出通过电位器(也称为实际位置)和板上嵌入的控制器 IC。
由于齿轮的转动,电位器的旋钮转动,从而产生电压,连接到误差检测器。现在由于连接到控制器IC(即该控制器是集成在芯片上的H桥)的比较器比较两个信号而产生的误差。比较之后,会产生一个错误,使控制器能够决定轴在任一方向上的旋转,以达到目标位置。 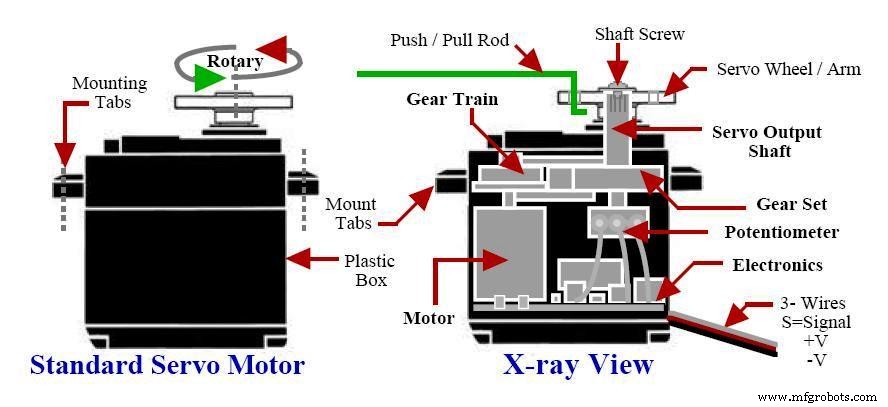
伺服的种类:
伺服有不同的品种。
- 位置旋转伺服:
输出轴只会旋转 180 度。额外的挡块用于限制轴在其范围之外的进一步旋转(例如:机器人手臂、方向舵等)
- 连续旋转伺服:
类似于位置旋转伺服,但可以360度连续旋转。发送到伺服器的命令将使其以不同的速度顺时针或逆时针方向旋转(例如:雷达盘等)。
- 线性伺服:
这个舵机的运动是前后方向而不是圆周方向(例如:CNC机器,3D打印机等)。
伺服电机和直流电机的基本比较:
伺服电机可以来回旋转180度,而直流电机只要通电就可以旋转360度。现在的伺服也可以连续旋转,可以360度旋转,但由于齿轮设计,伺服的速度比直流电机要小。直流电机是自由奔跑机器人的最佳选择,而当我们需要精度时(例如:ROBOTIC ARM、雨刮器船舵等),伺服是最佳选择。
直流电机的速度由 PWM(脉冲宽度调制)技术控制(即,通过改变占空比,我们可以控制直流电机的速度)。例如:占空比大于 50% 表示速度较快,占空比小于 50% 表示速度较慢。
而伺服电机中的 PWM 技术决定其轴的位置而不是速度。一旦命令发送到伺服器,它将精确地将轴的位置设置到所需的位置。因此,其轴的这种自动可调行为使伺服成为机器人应用的完美选择。
工业技术