

Arduino 3D 打印机械臂
组件和用品
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 |
必要的工具和机器
 |
| |||
 |
|
应用和在线服务
 |
|
关于这个项目
该项目使用 4 个。由 Arduino 板供电的廉价 SSG 90 伺服电机。您可以从下面给出的链接或直接到 Thingiverse 网站下载用于 3D 打印的 .stl 文件,
https://www.thingiverse.com/thing:1015238
在这里你可以找到制作这个机械臂的更详细的说明。
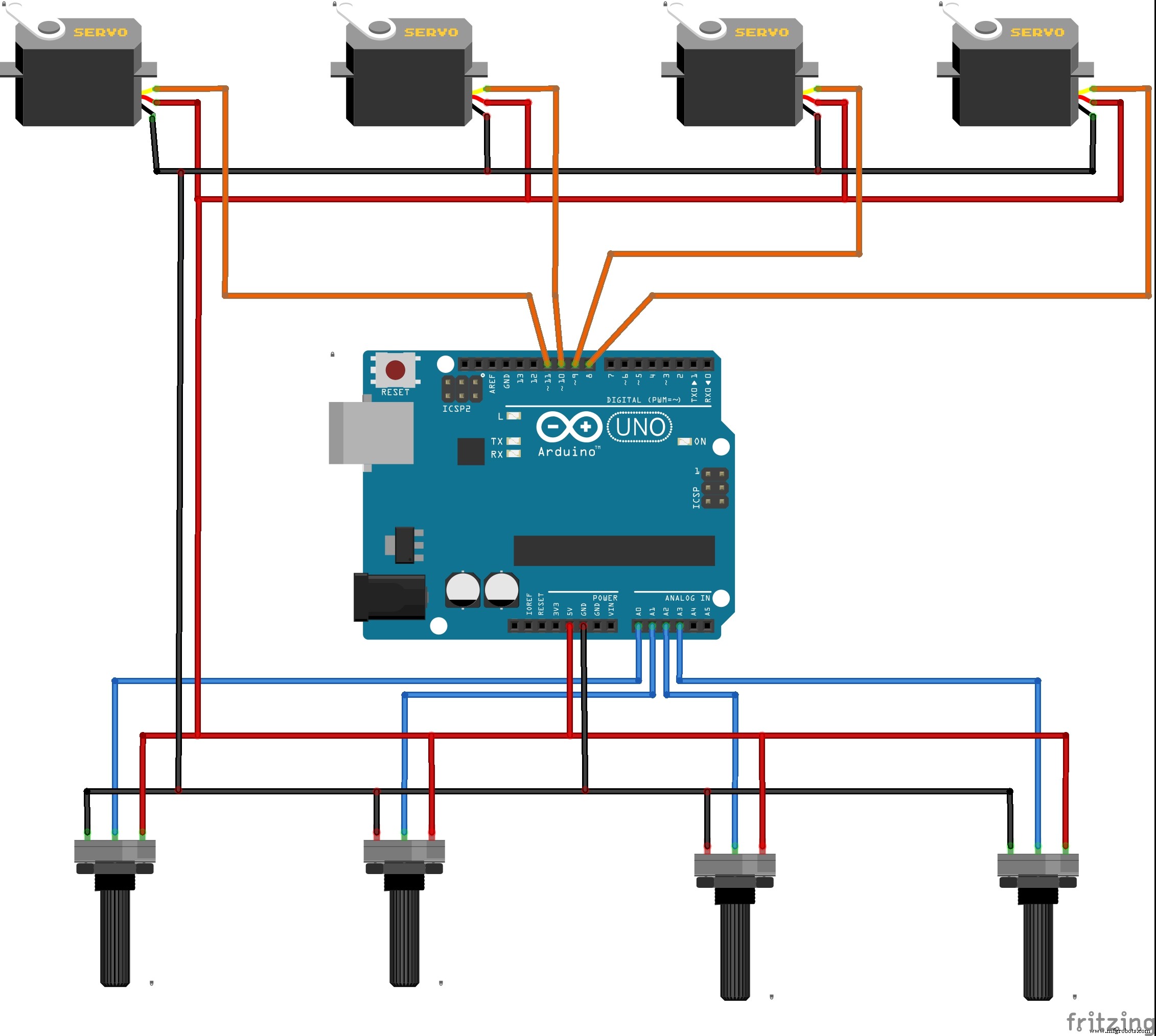
如前所述,伺服电机由 Arduino 板驱动。为此,我还编写了一个简单的代码,以便每个伺服器都由一个合适的电位器控制。小练习后,使用电位计的操作变得非常容易和有趣,如视频所示。
未来,我将尝试扩展代码,选择捕捉并自动执行伺服电机的某些运动,从而得到一个完整的工业机器人。
原理图如下图所示。
代码
- 代码
代码Arduino
#includeServo myservo; // 创建伺服对象来控制一个servoServo myservo1;Servo myservo2;Servo myservo3;int potpin =0;// 用于连接电位器的模拟引脚int potpin1 =1;int potpin2 =2;int potpin3 =3;int val; // 用于从模拟 pinint 读取值的变量 int val1;int val2;int val3;void setup() { myservo.attach(8); // 将引脚 8 上的伺服连接到伺服对象 myservo.attach(9); myservo.attach(10); myservo.attach(11);}void loop() { val =analogRead(potpin); // 读取电位器的值(0 到 1023 之间的值) val =map(val, 0, 1023, 0, 180); // 缩放它以与伺服一起使用(值在 0 到 180 之间) myservo.write(val); // 根据缩放值设置舵机位置 delay(15); // 等待舵机到达那里 val1 =analogRead(potpin1); val1 =map(val1, 0, 1023, 0, 180); myservo1.write(val1);延迟(15); val2 =模拟读取(potpin2); val2 =map(val2, 0, 1023, 0, 180); myservo2.write(val2);延迟(15); val3 =模拟读取(potpin3); val2 =map(val3, 0, 1023, 0, 180); myservo3.write(val3);延迟(15); }
定制零件和外壳
eezybotarm_uVD6bjbxQi.zip示意图
制造工艺