

正确对齐可以提高皮带传动性能
简介
未对准是导致皮带过早失效的最常见原因之一。根据其严重程度,错位会增加磨损和疲劳,从而逐渐降低皮带性能。或者,它可以在几小时或几天内破坏皮带。虽然错位的形式可能很容易理解,但如果维护人员要采取纠正措施,则必须确定准确的测量值和可接受的限制。
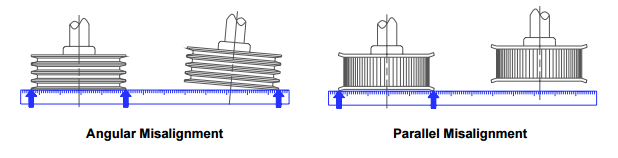
对齐类型
基本上,任何程度的错位,角度或平行,都会降低皮带传动的正常使用寿命。
角度不对中会导致皮带/滑轮加速磨损,并导致单个 V 型皮带出现潜在的皮带稳定性问题。一个相关的问题是皮带和绳索负载不均匀,导致多个皮带驱动器内的负载分配不均,并可能导致过早失效。在未对准的条件下运行时,连接的 V 形带可能会出现系带分离。盖茨公司动力传动产品应用工程师告诫说,角度不对中会对同步带传动的性能产生严重影响。
诸如高皮带跟踪力、不均匀的齿/齿面磨损、边缘磨损、高噪音水平以及由于帘线负载不均匀导致的潜在拉伸失效等症状是未对准的典型指标。此外,宽同步带比窄同步带对角度偏差更敏感。
平行错位还会导致皮带/滑轮磨损加速,并导致单个 V 型皮带出现潜在的皮带稳定性问题。不均匀的皮带和绳索负载不像盖茨白皮书那样重要——正确对齐可以提高皮带驱动性能,但角度不对中。然而,与同步带相比,平行错位通常更受 Vbelts 的关注。这是因为三角带在固定槽中运行,不能像同步带那样在法兰之间自由浮动。
平行不对中通常不是同步带驱动的关键问题,只要皮带不会被夹在或夹在相对的法兰之间,并且只要皮带轨道完全位于两个链轮上。
同步链轮的面宽设计为大于皮带宽度,以防止与公差累积相关的问题,并允许少量(几分之一英寸)的安装偏移。
只要相对链轮法兰之间的宽度超过皮带宽度,皮带就会自动正确对齐,同时在两个链轮上寻找舒适的操作位置。同步带在运行时与系统中的至少一个链轮法兰轻微接触是正常的。同步带很少在链轮中间运行而不接触至少一个法兰。
测量错位
盖茨工程师说,测量错位的最佳工具是激光对准设备。但是,当没有可用的工具时,下一个最好的工具是直尺,例如长水平尺、挤压铝条或直尺,具体取决于驱动器的中心距。激光工具和直尺用于投影一个滑轮或链轮面相对于另一个的方向。
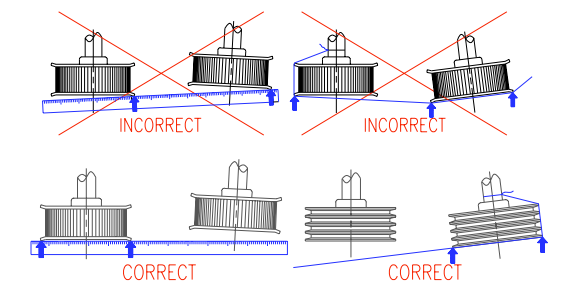
在准备测量平行偏差时,维护技术人员必须首先验证滑轮和链轮的边缘是否具有相同的厚度,或者量化厚度差异。重要的是将滑轮槽或链轮面直接对齐,而不仅仅是滑轮或链轮(法兰)的外表面。可能需要安装滑轮或链轮,外表面相互偏移,以便正确对齐凹槽或链轮面。
还应检查链轮法兰以确保它们运行正常。如果在检查过程中激光工具或直尺靠在损坏法兰的外边缘,弯曲的法兰可能会导致错误的测量。
为了确定多少偏差是可以接受的以及在什么时候变得过度,必须首先测量、量化对齐,然后与皮带制造商对特定类型皮带的建议进行比较。这些建议可以在驱动器设计手册中找到。
量化错位
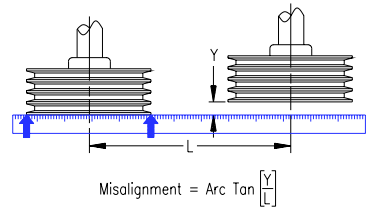
偏差可以通过数学方式量化,也可以与一些通用的经验法则进行比较,以获得更快、更容易的结果。当使用直尺投影滑轮或链轮 #1 的外表面相对于滑轮或链轮 #2 的平面时,角度偏差可以量化为直尺与滑轮或链轮的外表面之间的间隙差异#2 横跨直径。
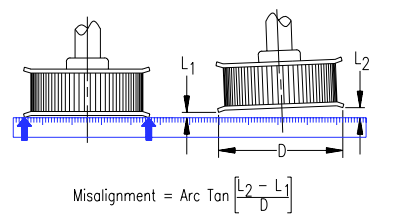
平行错位角可以量化为直尺与两个滑轮或链轮外表面之间的间隙差值。
V 型带推荐的总允许偏差一般为 1/2 度。虽然已知单个 V 型带能够在变得不稳定之前处理更大的不对中量,但将不对中保持在 1/2 度以内可以最大限度地延长皮带寿命。
同步、聚氨酯 60 度带 (Polyflex) 和聚 V 带 (Micro-V) 建议的错位总量为 1/4 度。与传统的 V 型皮带驱动相比,这些驱动器对错位的容忍度更低,必须更准确地对中。
在确定 V 型驱动系统是否在这些建议范围内对齐时,必须单独测量和量化角度和平行偏差,然后将它们加在一起。然后可以将角度偏差和平行偏差的总和与皮带制造商针对特定驱动类型的建议进行比较。
如上所述,同步带链轮的齿面宽度大于带宽,以防止因公差累积引起的带配合问题。这种额外的链轮面宽度允许皮带在链轮面上自由浮动。
由于同步带特别容易被夹住或夹在相对的链轮法兰之间,因此必须安装链轮,以便皮带边缘和两侧的法兰之间有间隙。如果相对链轮法兰和皮带边缘之间存在间隙,则不需要量化平行偏差并将其添加到角度偏差中。
经验法则
维护技术人员在确定系统是否处于可接受的对准状态时,可能并不总是发现准确计算系统中的总偏差是可行的或可能的。也很难可视化角度的一小部分,例如 1/2 和 1/4 度。使用以下经验法则可以更清楚地说明这些:
对于 V 型皮带传动:
1/2 度角 =每英尺距离大约 1/10 英寸。
对于同步、60 度角和 V 型肋驱动器:
1/4 度角 =每英尺距离大约 1/16 英寸。
这些规则可用于直观地估计角度和平行错位量,而不必计算实际数值。
例如,为了使同步带驱动在皮带制造商的角度偏差建议范围内,从链轮外表面到直尺的距离在 12 英寸直径上的差异不应超过 1/16 英寸.
对于直径为 6 英寸的链轮,此差异不应超过 1/32 英寸。如果差值大于此值,或计算出的角度超过最大推荐值 1/4 度,则应重新调整驱动器。
结论
未对准可能是获得令人满意的同步和 V 带驱动性能的障碍。在许多情况下,在复杂的驱动应用中不容易检测到。维护技术人员还应检查相关组件,例如支架和平台,以确保设计和放置正确。这些部件必须足够坚固,能够承受皮带传动施加的峰值力,而不会弯曲或弯曲。
在此处阅读原文。
在 J/E,我们是 Gates 的授权经销商。我们提供皮带、软管和链轮等产品。要查询我们的任何产品,请访问我们的联系页面或发送电子邮件至 info@je-bearing.com
设备保养维修