

访客博客 — Charles Guan 与 Markforged
此客座博客由麻省理工学院机械工程专业毕业生、前麻省理工学院机械车间和设计讲师 Charles Guan 撰写。他还是 ABC 的 BattleBots 机器人大修的建造者,将于今年夏天东部时间周四晚上 8 点/中部时间晚上 7 点播出。他在机器人和交通领域担任工程顾问,并由 Markforged 赞助参加 BattleBots。查看他的网站和等于零机器人。
一些战斗机器人背景

在机器人格斗世界中,您经常会看到一些基本设计——楔子、鳍状肢、锤子、旋转转子等等。与传奇口袋妖怪一样,有些设计是“圣杯”,在竞技场中很少见,甚至很少能很好地执行。 “飞轮鳍状肢”就是其中之一。通常情况下,你的高速翻转手臂,也就是人们看到的将对手扔到空中几英尺的手臂,是气动的。但是气动装置虽然功率密集,但能量并不密集,即使是最好的鳍状肢,在气体耗尽之前也只有不到十次击球。电动飞轮鳍状肢结合了电池的高能量密度和飞轮动能的高功率可用性。
将这种能量转化为一种可快速释放但可控的形式,一直难以捉摸。设计挑战包括可靠的参与机制、一致的时间安排、逐渐加速以及与业务端的强大链接。搞乱其中任何一个,你还不如造一个动能手榴弹。
在整个机器人格斗历史中,只有少数几个例子被制作出来。在小端,有 Zac O’Donnell 的 3 到 30 磅级机器人系列,包括他的机器人 Magneato,以及 Dale Heatherington 相对成功的设计。对于大型机器人,Warrior 一直是基准。

如果您注意到,这些机器人中的每一个都使用不同的设计方法和最终机制。这说明了设计在社区中的探索程度;机器人设计往往会随着建造者找到局部最优解决方案而变得相似,因此具有多种手段的武器设计是一种尚未驯服的武器设计。
几年来,我一直在寻找一种紧凑的同轴解决方案来解决这个问题,该解决方案可以与“尖头飞轮”(一个旋转的鼓或带齿的盘)一起安装并连接到另一侧的机构机器人。这使得双武器机器人具有很多战略可能性。所以我想我会利用 BattleBots 锦标赛之间的休赛期,在一个 3 磅的小型机器人上进一步追求这个想法,保持我的设计技能敏锐,并帮助为社区找到另一个解决方案。为什么是 3 磅级的机器人?因为它是一种简单的尺寸,您可以使用 Mark Two 进行打印!

设计 3D 打印齿轮机构
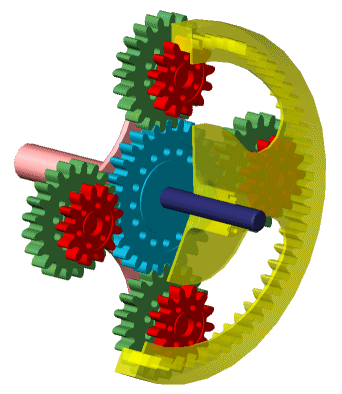
要求包括将非常高的齿轮比(大约 20 比 1 或更多)装入同轴体积中,并找到一种仅在必要时接合齿轮减速的方法。我研究了被称为复合行星齿轮系的行星齿轮系统,翻出了几本参考书,包括著名的“机构和机械设备资源手册”,并在互联网上搜索设计白皮书。简而言之,这可以利用两个尺寸略有不同的齿圈的相对速度,在与简单行星齿轮箱相同的体积内创造极高的齿轮比。
在短暂地设计了定制的滑动爪式离合器和摩擦带后,我意识到我只是在设计我自己的自动变速器。复杂的东西在战斗中通常不会长久,所以我不得不想另一种方式来使用这个齿轮减速系统。解决方案在于使用齿轮组作为扭矩分配装置。您可能将其称为 Toyota 的“Hybrid Synergy Drive”或以任何数量的其他商标无级变速器名称命名。与历史上的许多发现一样,这一发现是偶然的——我在旋转我的 CAD 模型时发现固定一个齿圈会使另一个齿圈仍在旋转,反之亦然。我忘记了“相对速度”意味着其中一个速度可以为零。
兴奋地,我迅速建立了一个玩具齿圈和行星齿轮组的模型,并使用 Onyx 将其打印在 Mark Two 上。缟玛瑙是我唯一相信足够坚固和坚固的材料。由于机器人尺寸小,我可以使用的齿轮齿尺寸受到限制;普通的尼龙牙齿太灵活了。所以我想把玩具模型也用作最终产品的公差规,以防我不得不对尺寸进行微小的改变。该模型证实了我的假设,即我只需要使用任何方法突然停止一个档位——通过刹车、通过离合器,或者通过简单的通过自行车轮辐的棍子,另一个环被迫旋转!

为机器人战斗做好准备
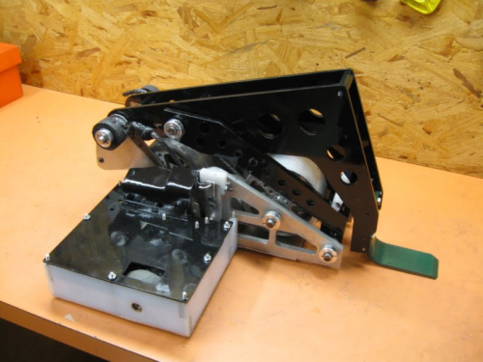
机器人的工作随即开始。我从很久以前就拿出了我的一些构思草图,并决定只使用“第一次通过”CAD 模型来确定概念,并从那里开始处理个人设计需求。长话短说,这是现在设计的照片!
那么这里发生了什么?它有一个可以倒转的三角形体——没有“倒置”可言。左边的圆形银色物体是一个 8 盎司的铝制转子,带有内六角螺栓作为“牙齿”,这是这种小重量级别的旋转武器的常见策略。行星机构采用黑色建模(适用于 Onyx),伺服电机将根据指令将滑动齿推入带槽口的齿圈,迫使其停止旋转而另一个齿圈启动。这个齿圈有一个偏置凸轮凸角,带有一个连接杆的“蝶形连杆”,当凸轮旋转时,它迫使上下金属翼分开。金属机翼铰接在一个公共点上,因此其中一个会与地面发生反应,而另一个则将此时上方的任何东西向上举起。
在这个设计完成之前,还有一些细节和几何问题需要解决,但我现在对这个概念充满信心。它有其缺点——例如,如果滑动齿卡住,该机制将始终开启,机器人可能会失去移动性。如果它在机翼上没有重量的情况下干火,它可能会将自己送到屋顶。但是看着你的设计的缺点让自己变得非常明显是这项运动的乐趣的一部分,所以我期待看到这个机器人会发生什么!
这是系统的演示:
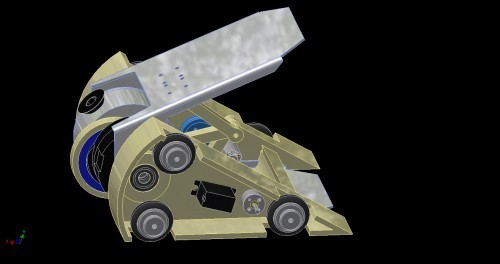
这里还有一些设计的图片:


照片由 Charles Guan 提供。
3D打印
- 专家访谈:Markforged
- 夹具和固定装置:通过 3D 打印提高生产效率的 6 种方法
- 使用 Arduino 和 Raspberry Pi 构建您的 Internet 控制的视频流机器人
- 停机维护。可靠性更高。
- 使用 Formlabs 和 Fusion 360 加快设计和制造速度
- Stratasys 与 GrabCAD 和 e-Xstream 合作
- 使用 SOLIDWORKS 和 MakerBot 纠正混乱
- Face First:Kevlar® 鼻部保护与 Markforged
- Markforged 在机器人战斗中占主导地位
- 使用 Markforged
- 使用 Markforged Composites 的 3D 打印装配夹具
- 取放 – 机器人与 EasyWork 结合使用的完美示例