

研究人员开发了机器人指尖,用于在干燥和潮湿条件下抓取和释放物体
金泽大学的一组研究人员开发了一种机器人控制系统(即指尖),用于在干燥和潮湿的条件下抓取和释放物体。
研究人员表示,该研究能够验证“通过使用合适的润滑剂可以控制具有高摩擦力的柔软表面流体指尖抓取物体”。
然而,他们补充说,为了将当前的控制技术应用于制造环境,有必要在各种条件下进行更多的实验。
尽管如此,这项研究有望成为实现工作自动化的一步,例如在狭窄空间内抓取和释放物体。
工业机器人现在应用广泛,在汽车制造等领域不可或缺。传统的机械手适合抓握固定形状的硬物,但不易抓握复杂的物体或轻柔的抓握。
还需要在各种条件下对物体的物理特性做出反应,如表面特性:干、湿等。
机器人手的软面指尖是可变形的,可以很容易地抓住复杂形状的物体,因为接触面积可以通过响应物体形状的表面变形来扩大。
表面柔软的指尖对于抓握柔软的物体非常有效;连豆腐都能抓到。
但一般来说,软质材料的表面摩擦力大,脱模比较困难。将物体释放到所需位置也很困难,尤其是在工作空间狭窄的情况下。
课题组由金泽大学渡边哲雄教授带领,一直在进行机器人手的指尖抓取物体的控制技术研究。
在本研究中,该小组旨在开发一种摩擦控制系统。
该小组使用机器人手的柔软指尖抓取物体;释放是通过涂抹(注入)润滑剂来完成的。
在这项研究中,无水乙醇(>99.5%)被用作润滑剂,因为乙醇在化学上是安全的,容易干燥,而且表面张力低。
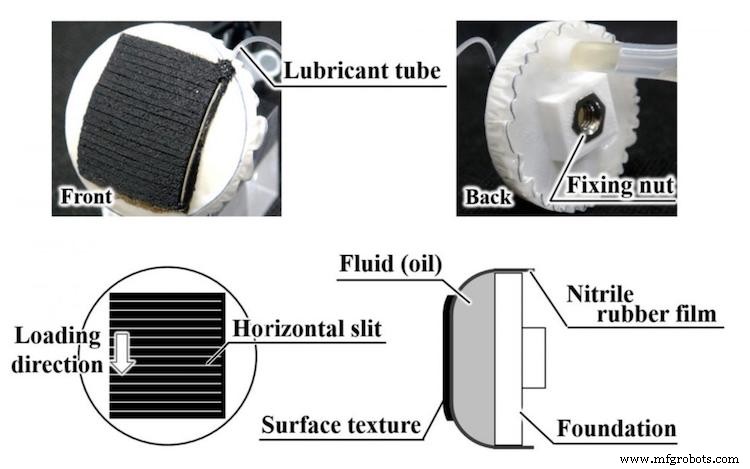
如图1所示,在指尖基础的侧面贴上了一层丁腈橡胶薄膜,形成了一个填充链锯油的空间,形成了“流动的指尖”。
然后将硅胶“纹理”粘合到橡胶膜上; “纹理”的材料是硅酮密封胶,有缝隙,缝隙间隔1.5mm,垂直于载荷方向。
引入狭缝是为了在水湿条件下产生较大的摩擦力和润滑剂扩散。
用这种流动的指尖抓握各种厨具用材料的物体,证实涂上润滑剂后摩擦力确实降低了。
在干湿条件下摩擦力均有所降低,而在油性条件下则未观察到这种润滑效果。
接下来,进行了装箱任务模拟。一个纸盒被两根流动的指尖从两边夹住。
上述“纹理”与每个流体指尖结合。通过在纸盒上放置重物确认抓握稳定。
卸下重物后,向两个流体指尖注入润滑剂,使纸盒在较短时间内(小于2.5 s)向下滑动,从而完成了纸盒包装任务。
如此处所示,高摩擦的“纹理”与流体指尖结合,注入润滑剂(此处为无水乙醇)可降低摩擦。
因此,在不移动指尖的情况下,通过控制摩擦力来实现物体在所需位置的释放和放置。
自动化控制系统