

什么是摆线驱动器?设计、3D 打印和测试
在本教程中,我们将了解什么是摆线驱动器,它是如何工作的,解释如何设计我们自己的模型和 3D 打印模型,以便我们可以在现实生活中看到它并更好地了解它是如何工作的。
您可以观看以下视频或阅读下面的书面教程。
摆线驱动器是一种独特的减速器类型,它提供非常高的减速比和紧凑但坚固的设计。与传统的齿轮传动,如直齿轮和行星齿轮传动相比,它可以在相同的空间或阶段实现高达 10 倍的减速比。除此之外,它还具有几乎零背隙、更高的负载能力、刚性和高达 90% 的高效率。这些特性使摆线驱动器适用于定位精度和性能很重要的许多应用,例如机器人、机床、制造设备等。
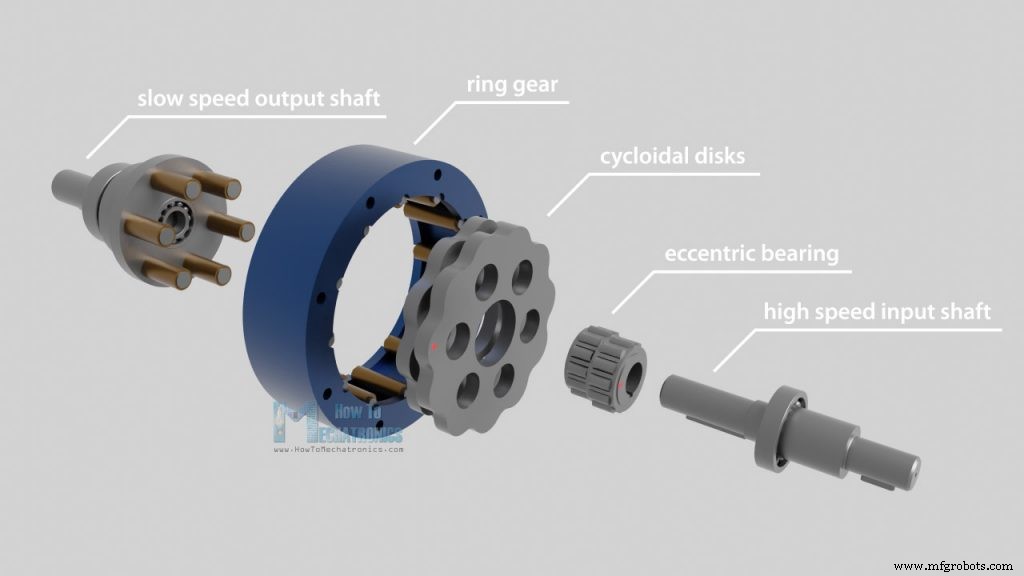
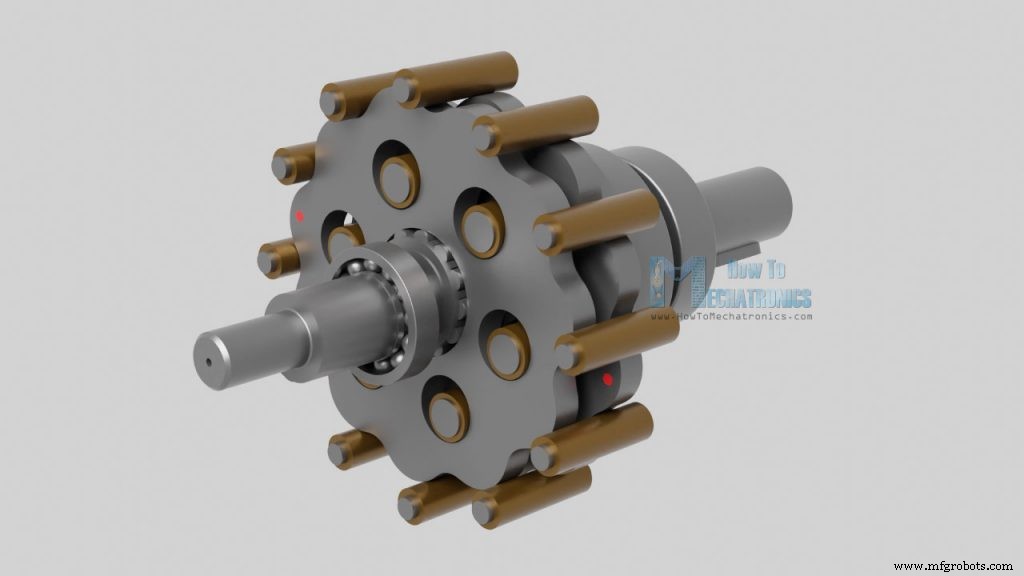
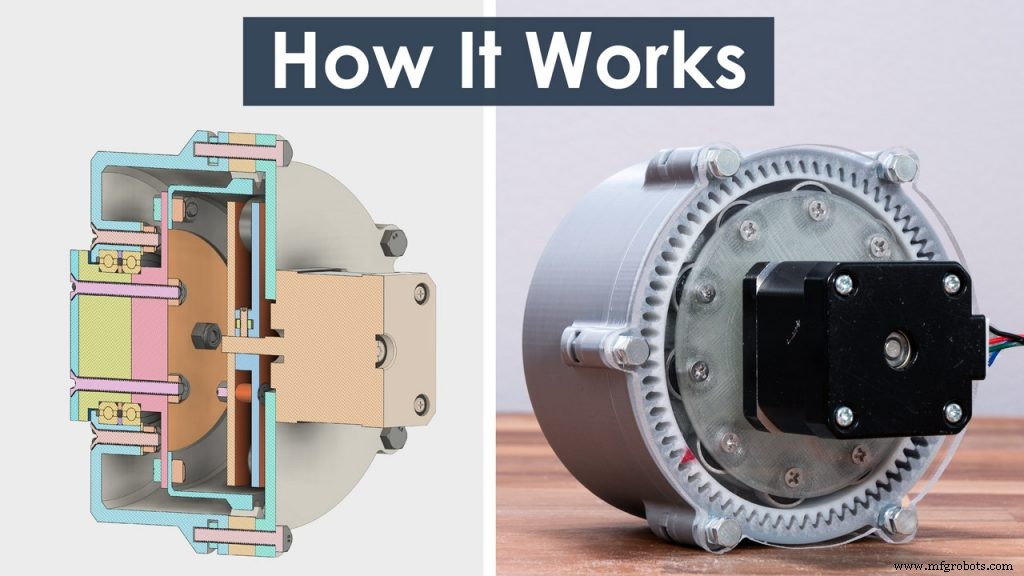
现在让我们看看里面有什么以及摆线驱动器的工作原理。摆线驱动由五个主要部件组成,高速输入轴、偏心轴承或摆线凸轮、两个摆线盘或凸轮从动件、带销和滚子的环形齿轮以及带销和滚子的低速输出轴。
输入轴驱动偏心轴承,偏心轴承围绕齿圈外壳的内圆周驱动摆线盘。偏心运动使摆线盘的齿或凸角与齿圈壳体的滚子啮合,使它们在减速时产生反向旋转。
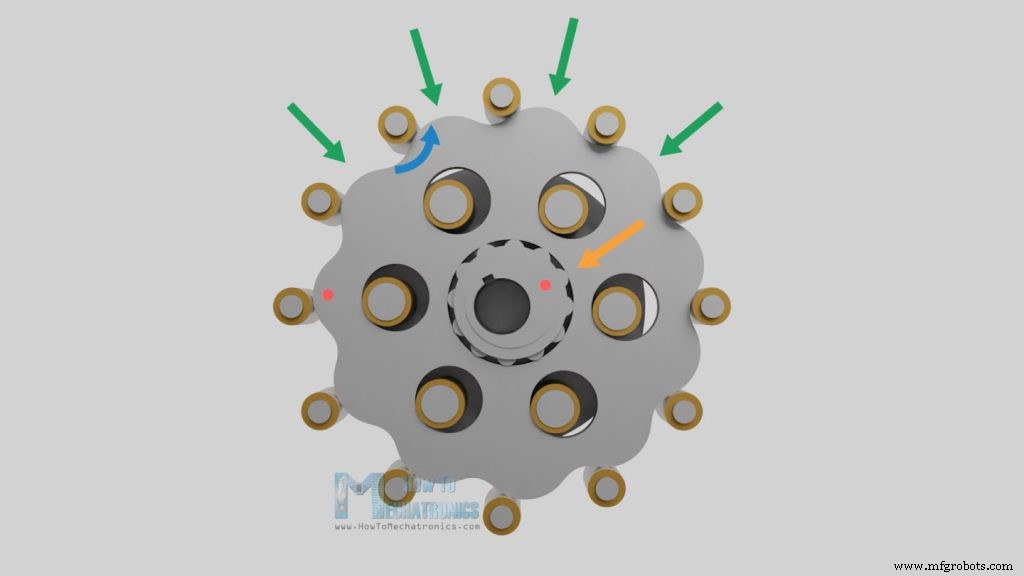
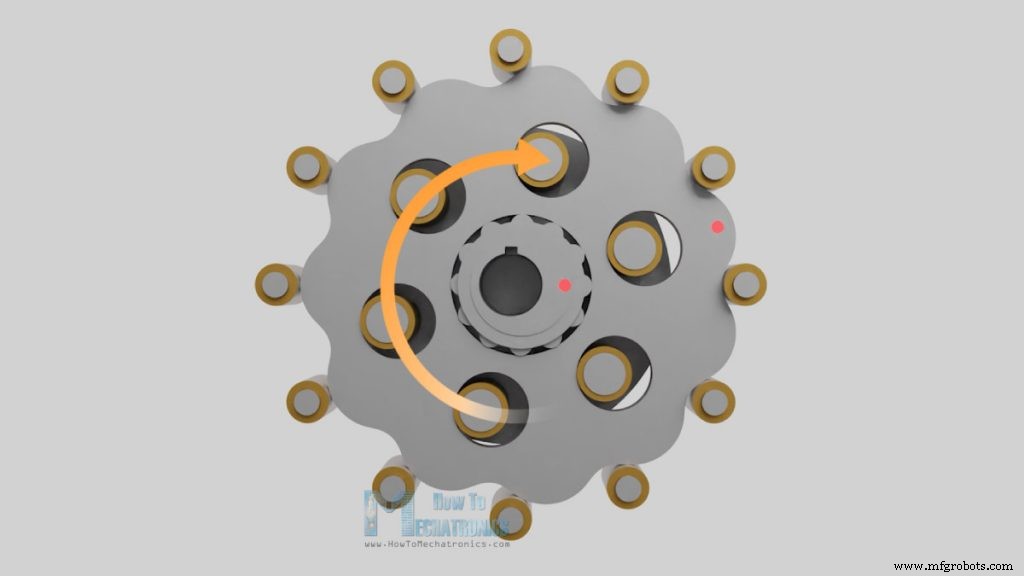
我们可以在这里仔细观察,发现偏心轴承实际上是在将摆线盘推向齿圈滚子。
由于独特的圆盘形状及其相对于齿圈滚子的位置,我们可以看到,随着偏心轴承的前进,旋转前的圆盘凸角将无法通过或跳过下一个齿圈滚子,但相反,它会向后滑动或滚动。这种行为实际上是导致磁盘反向旋转的原因。
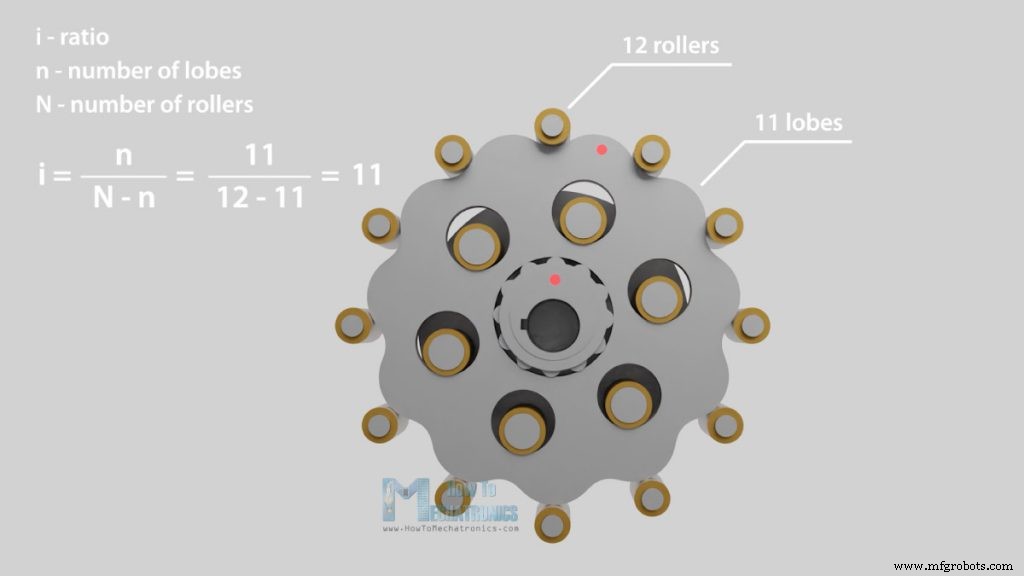
一般来说,与齿圈外壳上的销钉数量相比,圆盘上的摆线凸轮少一个。这使得,对于偏心轴承的一整圈,摆线盘仅移动一个叶片的距离。由此可见,减速比只取决于齿圈的销数。
例如,这里我们在齿圈上有 12 个销,这意味着摆线盘上有 11 个叶片,这是 11:1 的比率,或输出速度慢 11 倍。圆盘、齿圈滚子或偏心轴承的尺寸根本不影响减速比。
减小的旋转通过摆线盘上的孔传递到输出轴销。
有两个摆线盘,以 180 度异相放置,以补偿由偏心运动引起的不平衡力,并在更高的速度下提供更平稳的操作。
摆线驱动器的名称来自磁盘的轮廓,而磁盘的轮廓又来自摆线,但在视频的下一部分中我们将设计我们自己的摆线驱动器。
因此,现在我们知道摆线驱动器的工作原理,我们可以继续设计我们自己的模型,我们将能够对其进行 3D 打印。如果我们尝试 3D 打印这个演示示例,它可能会起作用,但它会很快失败,因为 3D 打印材料的强度不足以承受变速箱中出现的力和摩擦力。
关键部件是通常是衬套的滚子,如果材料是金属,这是一个很好的选择,但如果使用 PLA 材料,我们将不得不使用滚珠轴承。
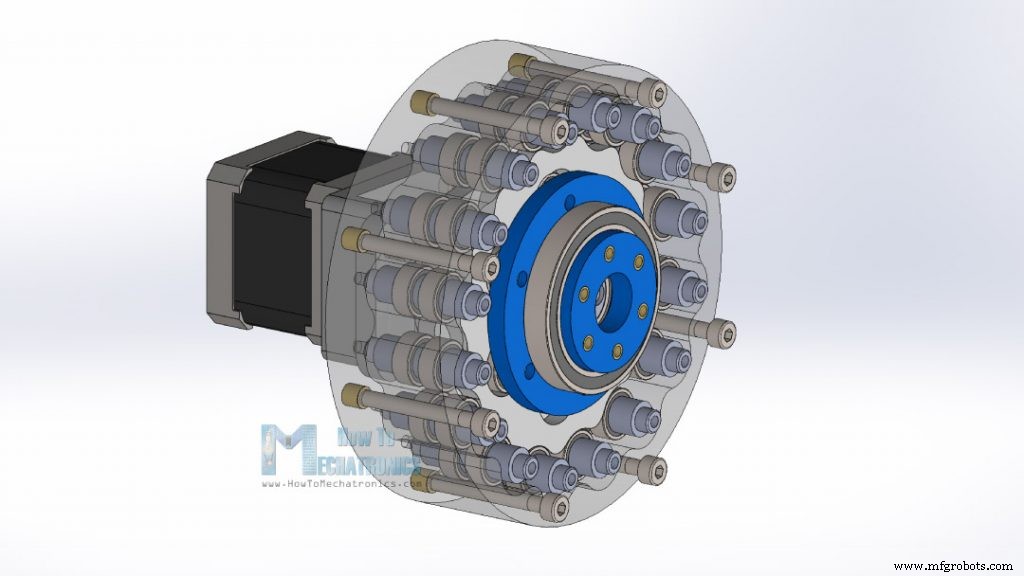
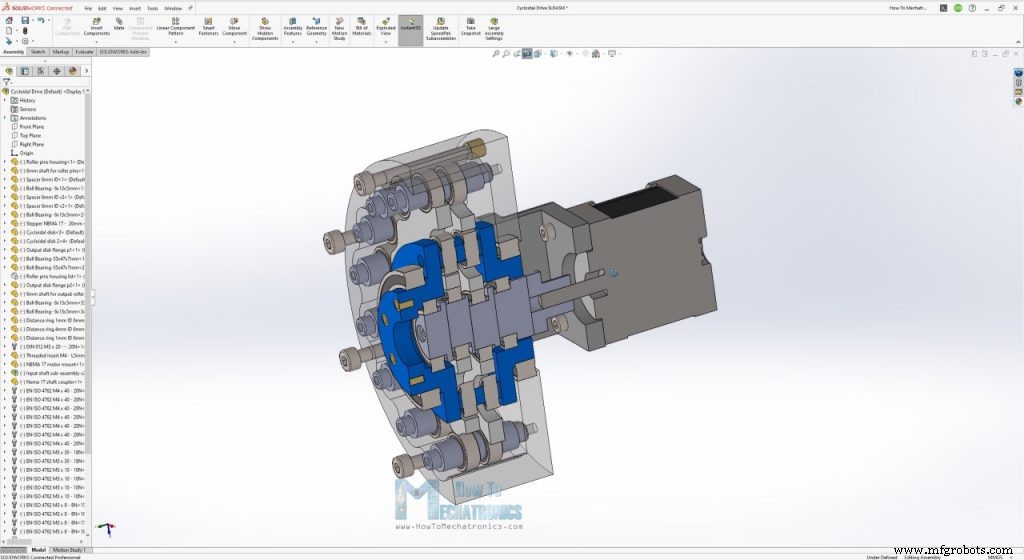
考虑到这一点,这是我设计并使用滚珠轴承的摆线驱动器。
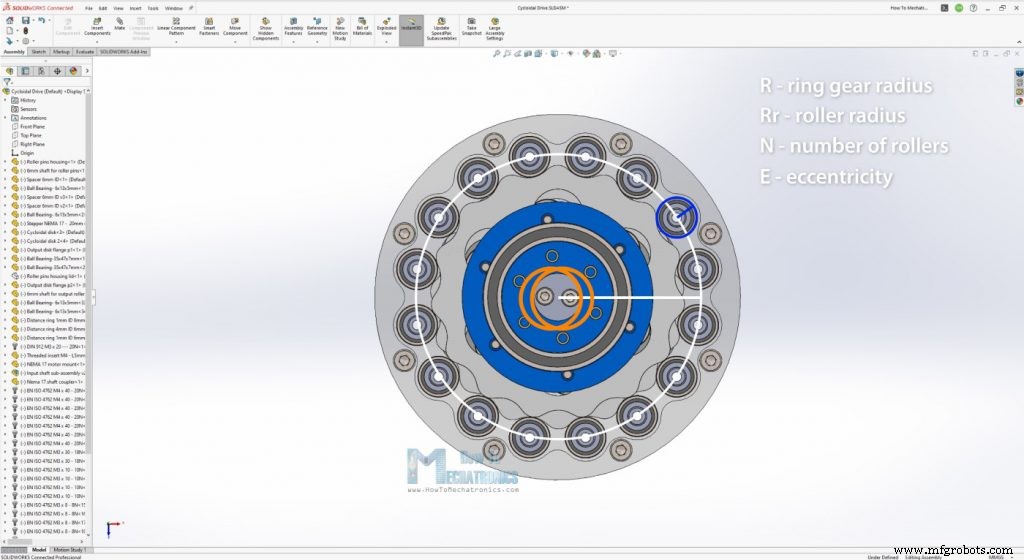
在设计摆线驱动器时,有四个主要的输入参数来定义摆线盘的尺寸和形状,即齿圈半径、滚子半径、滚子数量和偏心距。
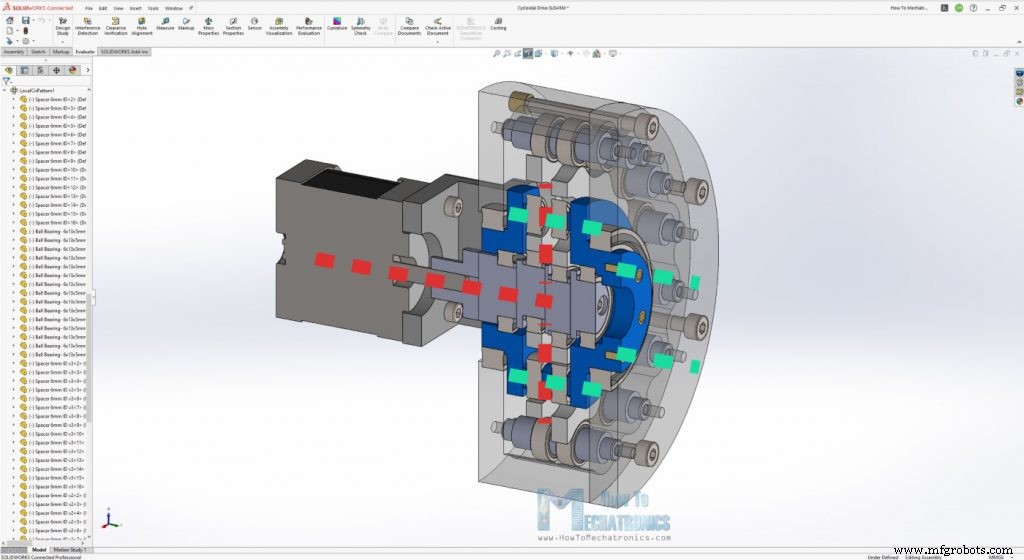
这是我使用 SOLIDWORKS 设计并使用滚珠轴承作为滚子的摆线驱动器。
在这一点上,让我大声疾呼 SOLIDWORKS 赞助了这个项目。您听说过 3DEXPERIENCE 世界吗? SOLIDWORKS 组织的年度活动?
3DEXPERIENCE World 2022 将一个充满活力的设计师、工程师、企业家和制造商社区聚集在一起,相互学习、交流、分享最新技术和最佳实践方面的知识。
请务必立即在 SOLIDWORKS.COM/3DXW22_HOWTOMECH 上注册 ,并且几乎免费参加。
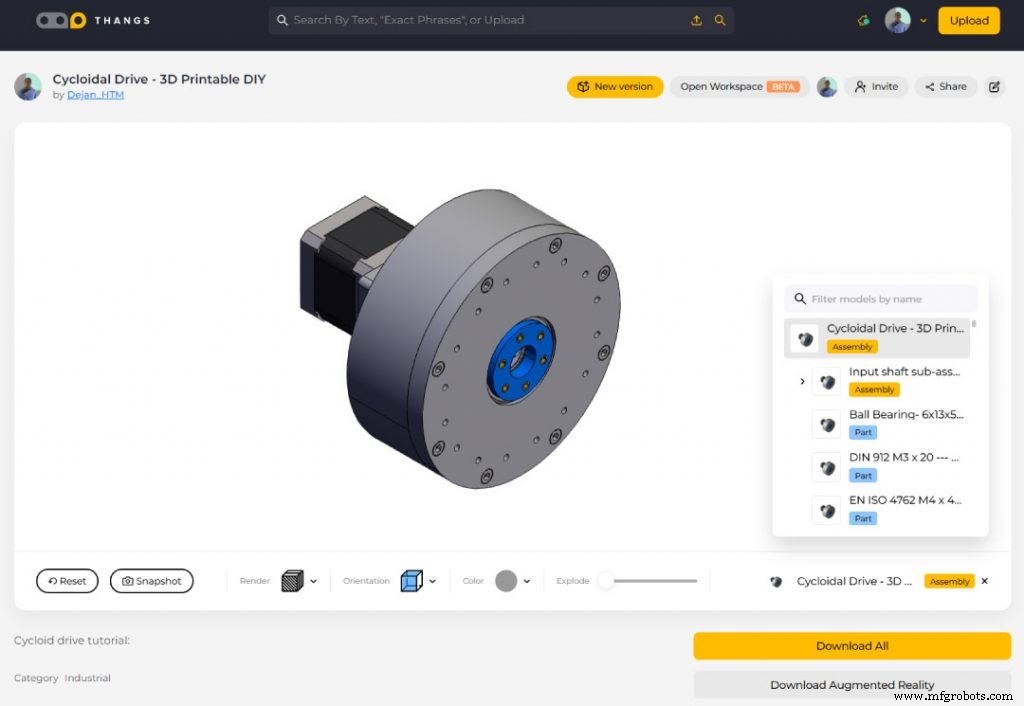
不过,您可以找到并下载此 3D 模型作为 STEP 文件,并在 Thangs 上的浏览器中进行探索:
您可以从 Thangs 下载 3D 模型 .STEP 文件。
感谢 Thangs 对本教程的支持。
至于用于3D打印零件的STL文件,您可以在这里下载:
相关项目
什么是应变波齿轮(又名谐波驱动)?适合机器人应用的完美齿轮组!?
我定义的第一件事是我想要这个变速箱的减速比为 15:1,这意味着我需要 16 个齿圈滚子。因此,我在 SOLIDWORKS 中绘制了一个带有 16 个滚轮的草图。
然后我选择使用外径为 13mm 的滚子轴承。现在根据这两个参数,我能够定义齿圈节圆直径的大小。我将其设置为 90 毫米。偏心距值应小于滚子直径的一半,我选择了1.5mm的值。
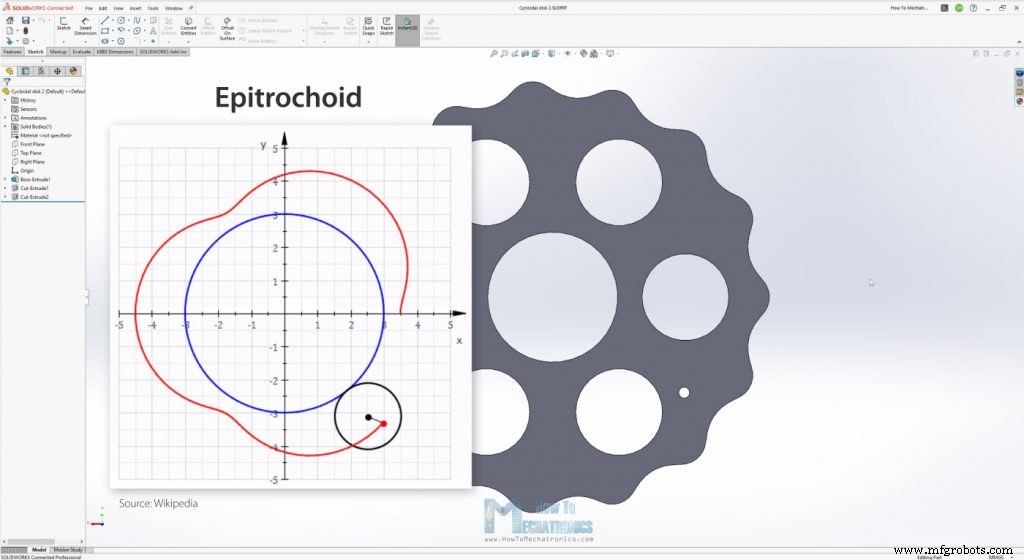
现在我们有了四个主要的输入参数,我们可以绘制摆线盘的形状或轮廓。正如我所提到的,磁盘轮廓来自一个摆线,它是一个圆上的点跟踪的曲线,因为它沿着直线滚动而没有滑动,或者它的变体,一个外摆线,当在圆周上滚动时跟踪.
还有另一种称为 Epitrochoid 的变体,其中跟踪点与外圆的中心相距一段距离,而这正是摆线盘轮廓的实际基础。
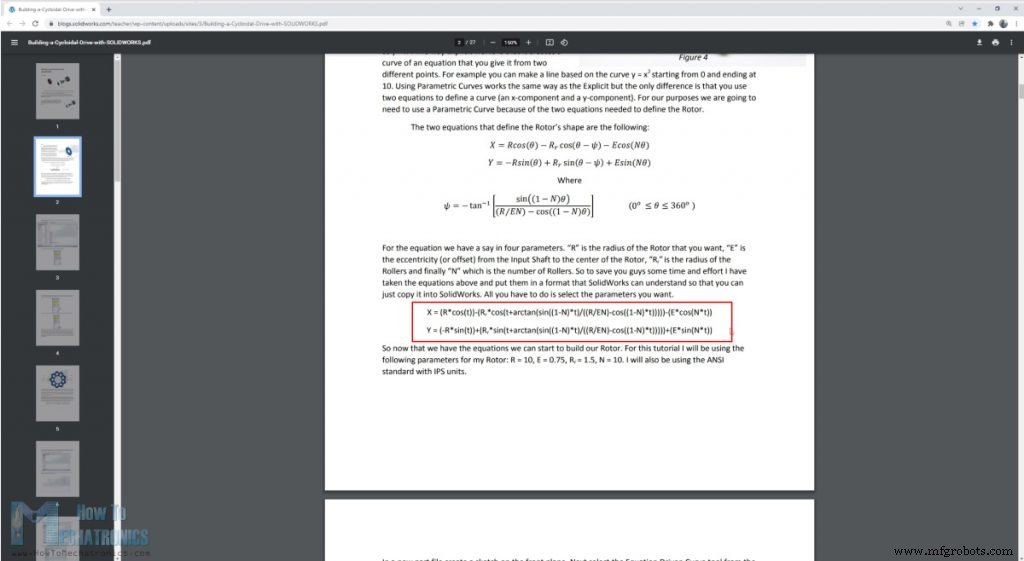
为了绘制这样的曲线,我们可以在此处使用这些参数方程,但其中还包含其他参数,例如滚子的直径和偏心率。这使事情稍微复杂了一点,但幸运的是,Omar Younis 为 SOLIDWORKS Education 博客撰写了一篇很棒的文档,其中他将所有这些参数组合在单个 X 和 Y 参数方程中。
这是方程式:
现在,为了生成轮廓,我们可以简单地使用 SOLIDWORKS 的方程驱动曲线工具,适当地插入两个方程,这将生成摆线盘轮廓。当然,对于输入参数我们应该插入我们的值。
另请注意,如果“t”参数为 0 到 2*pi 或 360 度,则不会生成曲线。因此,我们需要将 t2 参数设置为略短于 2*pi,然后生成具有小间隙的曲线,我们可以使用简单的样条将其连接起来。
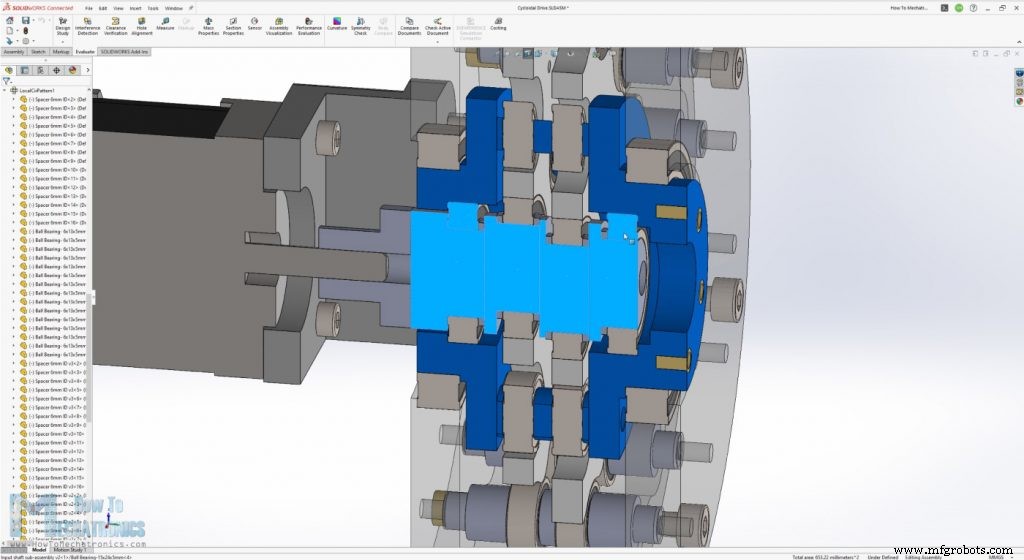
现在我们已经定义了摆线驱动的主要参数,剩下的只是为如何连接所有东西找到一个技术解决方案。同样,考虑到我们使用的 3D 打印材料不那么坚固,我将滚轮的轴设计为两侧支撑,以及输入轴和输出轴。
输入轴由多个部分组成,并由输出轴内的两个轴承支撑。输出轴也由外壳内的两个轴承支撑。
所以,回顾一下这个齿轮箱的工作,来自电机的输入被传递到偏心输入轴,该轴驱动齿轮环周围的摆线盘。
产生的反向运动通过输出轴滚子传递到输出轴。就是这样,现在让我们 3D 打印它,看看它在现实生活中是如何工作的。
在 3D 打印零件时,使用切片软件中的孔水平扩展功能非常重要。
通常,3D 打印零件的孔比原始尺寸小,因此通过此功能,我们可以合成并获得准确的尺寸,这对于该零件非常重要。我将我的设置为 0.07 毫米,水平扩展也可以补偿零件的外部尺寸,为 0.02 毫米。当然,您应该进行一些测试打印,看看哪些值会在您的 3D 打印机上为您提供最佳效果。
所以,这里有所有的 3D 打印零件,以及组装摆线驱动所需的轴承和螺栓。
以下是组装此摆线驱动器所需的所有组件的列表:
我首先将齿圈销插入外壳。这些销可容纳环形齿轮滚子或轴承,但它们的直径仅为 6 毫米。我不确定它们是否足够坚固,不会在摆线盘的负载下断裂。
因此,我把它们做成空心的,然后将我铺设的 3 毫米金属轴插入其中。这样,引脚肯定会足够坚固。当然,有更聪明的解决方案。例如,我们可以使用 M6 螺栓,但我不喜欢的是 M6 螺栓略小于 6mm,因此轴承会摆动。理想情况下,我们可以使用合适的 6 毫米杆,即使是 35 毫米这种特殊尺寸,实际上也很容易买到。
一旦我们将所有销钉都放置到位,我们就可以按顺序插入轴承,一个 7mm 距离环,一个轴承,然后是 3mm 距离环,一个轴承和另一个 7mm 距离环。
摆线驱动器现在应该安装在我们创建的这个环形齿轮中,如果我们尝试以偏心运动旋转磁盘,通过在旋转时向两侧推,磁盘应该开始反向旋转。
接下来,我们可以组装由四部分组成的输入轴。在每个部分中,我们都需要放置一个轴承和一些定距环,由于偏心,我们无法做到这一点,除非轴是分段制作的。
为了将这些部分连接在一起,我使用了两个穿过所有部分的 M3 螺栓。我们可以在这里注意到,这些 M3 螺栓的孔比 M3 螺栓的孔略小,以便螺栓在其中形成螺纹并更紧密地配合。
这是轴组装后的样子,但实际上我必须插入摆线盘,现在我做不到。所以,我把它拆开,再装上磁盘。
我继续组装输出轴。在这里,我们需要安装输出滚子或轴承,我们以与环形齿轮滚子类似的方式进行安装。一个 6 毫米的销,带有 13 毫米的轴承和一些通过一些 20 毫米长的 M3 螺栓插入的定距环。
当通过摆线盘的开口插入这些输出辊时,重要的是使两个盘相对于彼此异相 180 度定位。为了解决这个问题,我在两个圆盘上做了 180 度异相的小孔,所以在这里我们只需要匹配它们,我们就可以将滚轮插入其中。
请注意,这有点紧配合,但如果孔尺寸准确,我们将能够进行配合。
现在我们可以将这些销固定到另一侧的另一个法兰上,但为此首先我们需要在法兰中安装一些螺纹嵌件。我使用这些螺纹嵌件是为了使整个组件更加紧凑。
因此,一旦输入和输出轴组装在一起,我们就可以通过一个外径为 47mm 的轴承将整个组件安装到外壳中。
然后我们可以在轴的前面再安装一个这样的轴承,并将外壳盖插入到位。这也是一种紧密配合,因为所有 16 个引脚都应该适合它们的外壳盖槽,所以我们必须用一点力来插入它。
在外壳的背面,我安装了一些 M4 螺纹插件,然后用一些 40 毫米 M4 螺栓将盖子和外壳固定在一起。
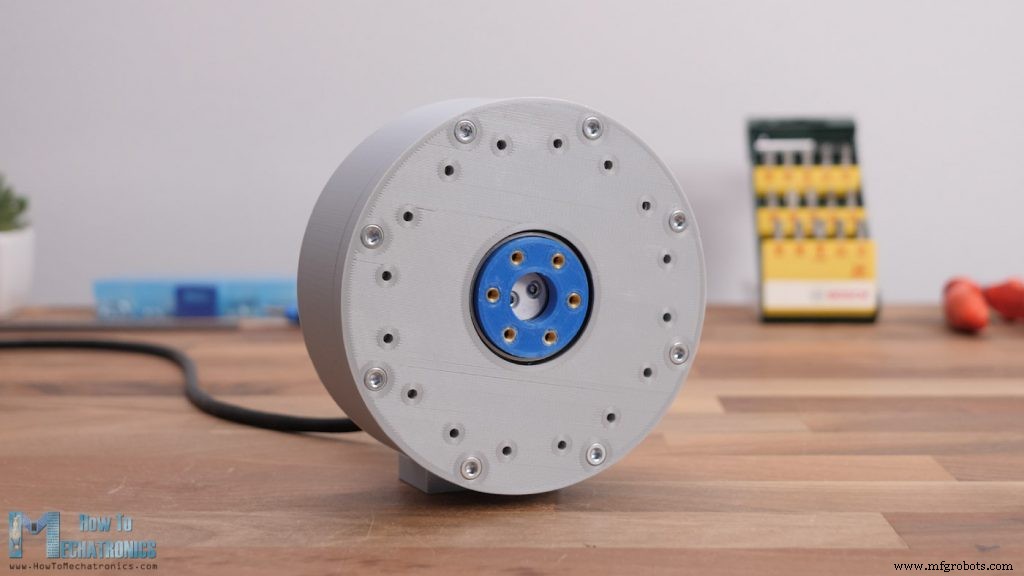
就是这样!如果公平地说,看看这个美丽。我真的很喜欢这个摆线齿轮箱的结果,干净的设计,没有任何东西弹出。
不过,现在让我们在上面安装一个电机,看看它是如何工作的。在输入轴的背面,我安装了更多的螺纹嵌件,以便我们可以轻松地连接各种轴耦合器。
为了测试变速箱,我将使用 NEMA 17 步进电机,因此我将合适的 3D 打印轴耦合器连接到输入轴。我将步进器固定在 3D 打印的安装支架上,并将电机轴插入耦合器,并将安装支架固定在外壳上。
最后一件事是在输出轴的前部安装一些螺纹嵌件,这样我们就可以将东西连接到它上面。这是摆线驱动器的最终外观,与 NEMA 17 步进电机结合使用,但我们当然可以在这里使用任何其他类型的电机。
我们终于得到它了。老实说,我真的很惊讶这个变速箱的输出竟然如此平稳。从前面我们可以看到输入和输出轴同时旋转,方向相反,速度差为15:1。
我还能够在没有前盖的情况下运行变速箱,因此我们可以看到前面解释的所有内容。
动作简直令人着迷。
最后,我做了一些测试来检查变速箱的性能。这里要注意的另一件事是,这种摆线驱动器也是可反向驱动的,这对于某些应用程序来说可能是一个很好的功能。
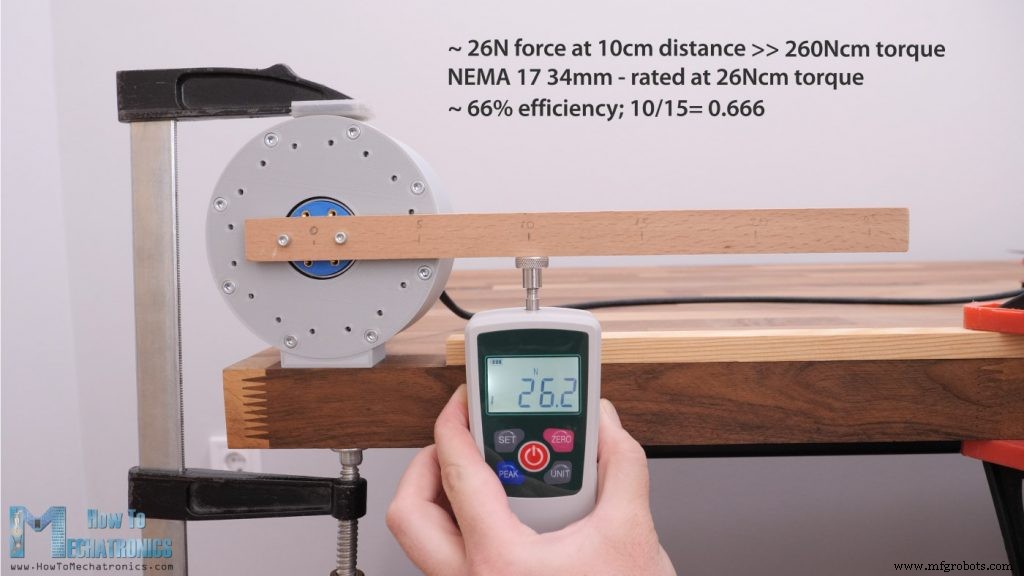
所以,我在这里测量这个变速箱在 10 厘米的距离上可以产生的力。我得到的读数约为 26N,转换为扭矩约为 260 Ncm,而这个只有 34mm 长的 NEMA 17 步进器的额定值为 26 Ncm。
这意味着摆线驱动的扭矩增加了大约 10 倍。考虑到减速比为 15:1,在理想情况下,我们应该获得 15 倍的扭矩增加,因此效率约为 66%。尽管如此,考虑到一切都是用廉价的 3D 打印机 3D 打印的,而且零件的精度不如我们使用一些专业打印机或 CNC 机器在全金属变速箱的情况下获得的精度,这仍然是一个很好的结果。
我也做了一些精度测试,结果也很好。
在制作一些机器人项目时,我肯定会在未来的视频中使用这种类型的变速箱。
我希望你喜欢这个视频并学到了一些新东西。如果您有任何问题,请随时在下面的评论部分提出。什么是摆线驱动?
如何设计摆线驱动器
DIY摆线驱动3D模型
设计
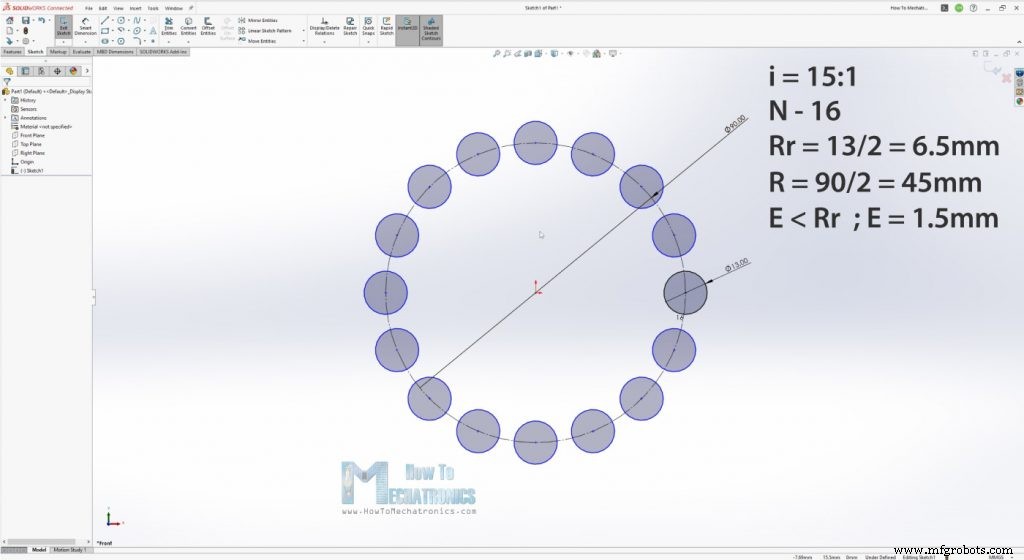
N - Number of rollers
Rr - Radius of the roller
R - Radius of the rollers PCD (Pitch Circle Diamater)
E - Eccentricity - offset from input shaft to a cycloidal disk
x = (R*cos(t))-(Rr*cos(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))-(E*cos(N*t))
y = (-R*sin(t))+(Rr*sin(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))+(E*sin(N*t))
===================
Values for this DIY Cycloidal Drive:
N = 16
Rr = 6.5
R = 45
E = 1.5
x = (45*cos(t))-(6.5*cos(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))-(1.5*cos(16*t))
y = (-45*sin(t))+(6.5*sin(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))+(1.5*sin(16*t))
Code language: Arduino (arduino)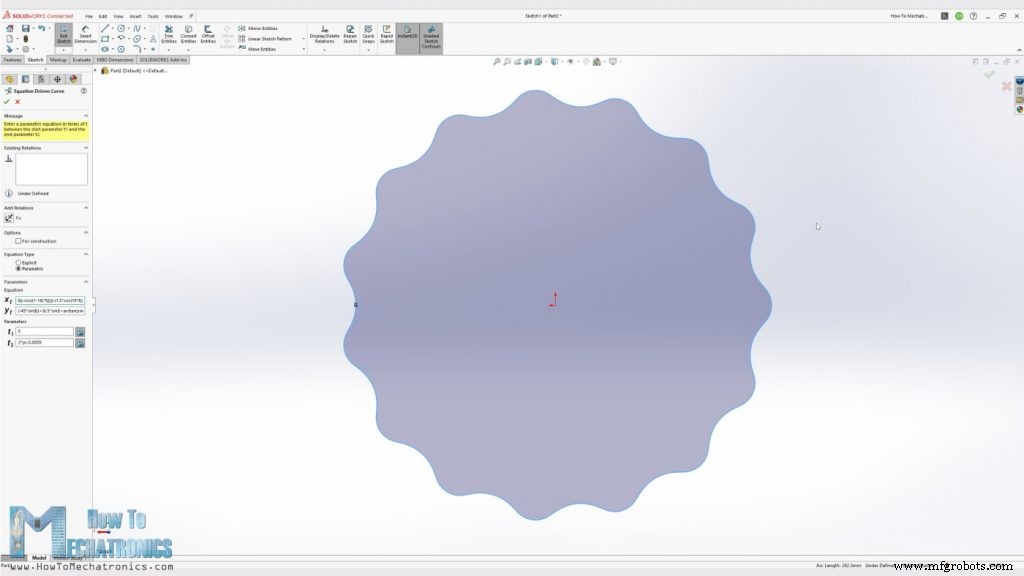
3D 打印

组装摆线齿轮箱













测试摆线驱动器




工业技术