

人类跟随机器人
组件和用品
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
应用和在线服务
 |
|
关于这个项目
嘿Guyzz...
在这场大流行中,我相信每个人都在家中保持安全。
我做了一个名为 Human Follow Bot 的新项目。
观看整个视频,在家制作这个项目。
它使用了 2 个红外传感器和一个超声波传感器。红外传感器用于跟随人或物体,超声波传感器用于向后移动机器人。
如果你喜欢这个项目,请尊重它。
给我建议,以便我改进它,或者您想向我的 YouTube 频道提供任何反馈。
链接是:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
你也可以给我关于“我下一个项目做了什么。?”的建议
制作这个项目的步骤:
1. 收集 Arduino、带轮直流减速电机、2 个红外传感器、超声波传感器、伺服电机、纸板、l293d 电机驱动器罩、电池 9 v、开关、跳线等组件。
2. 用硬纸板,把4个带轮子的电机都放在上面,做成一辆车。
3.在车上放置红外传感器。
4.车上贴伺服电机。
5. 将超声波传感器放入盒子中,并在其上连接伺服电机后添加手柄。
6.连接arduino和l293d电机屏蔽在车上。
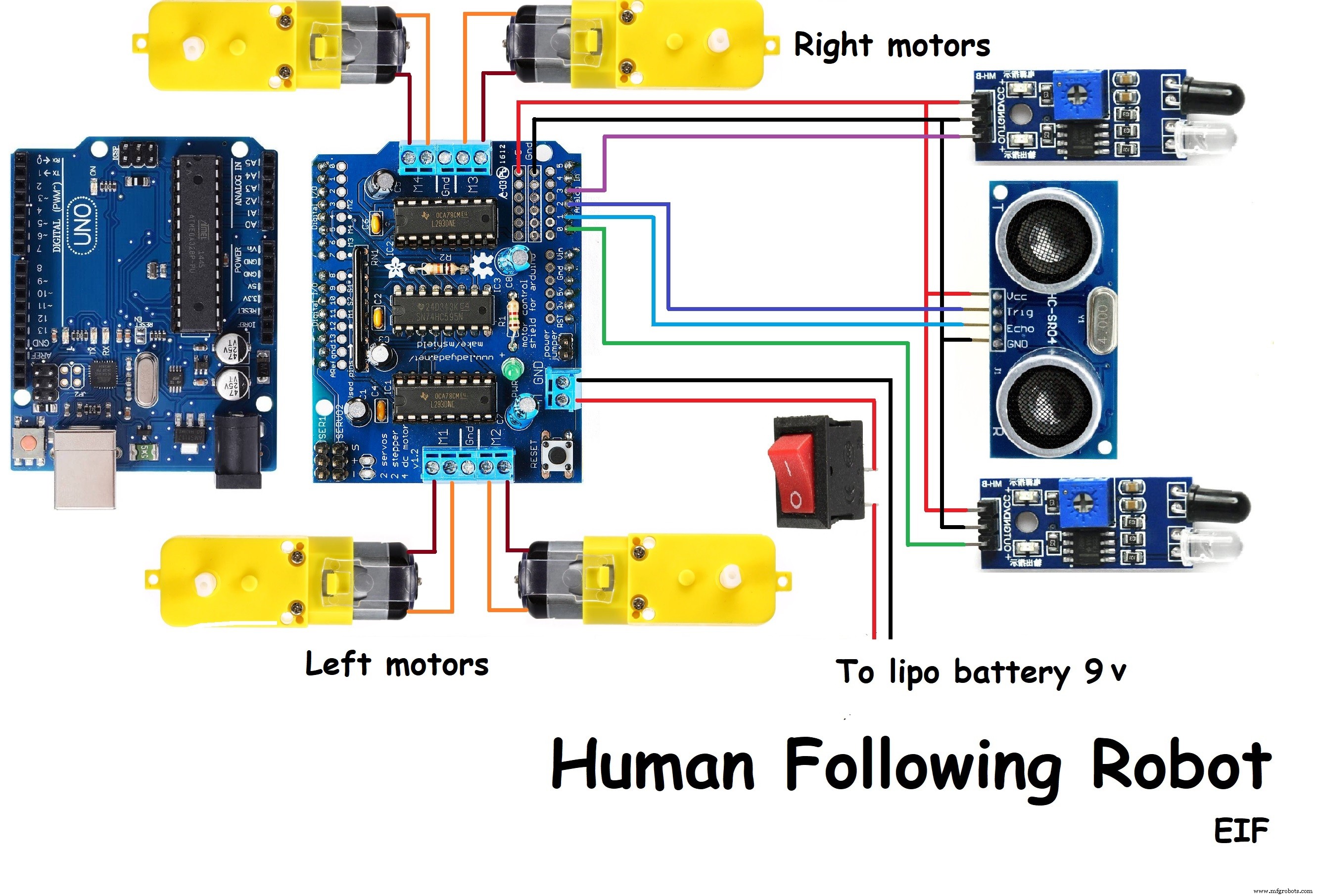
7.按电路图接线。
8.上传代码,将带电池的开关连接到l293d电机驱动屏蔽。
调节红外传感器的灵敏度。
您的项目已准备就绪...!!!
访问我的 YouTube 频道一次,查看更多有趣的项目。
“电子很有趣”
如果你喜欢我的频道,请订阅它。
链接:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
代码
- 代码
代码Arduino
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0#define echopin A1 // echo pin#define trigpin A2 // 触发引脚#define RIGHT A3AF_DCMotor Motor1(1,MOTOR12_1KHZ);AF_DCMotor Motor2(2,MOTOR12_1KHZ);AF_DCMotor Motor3(3,MOTOR34_1KHZ);AF_DCMotor Motor4(4,MOTOR34_1KHZ);Servo myservo; int pos =0;long time;void setup(){Serial.begin(9600);myservo.attach(10);for(pos =90;pos <=180;pos +=1){myservo.write(pos);延迟(15);} for(pos =180; pos>=0; pos-=1) {myservo.write(pos);delay(15);}for(pos =0; pos<=90; pos + =1) {myservo.write(pos);delay(15);}pinMode(RIGHT, INPUT);pinMode(LEFT, INPUT);pinMode(trigpin, OUTPUT);pinMode(echopin, INPUT);}void loop() {unsigned int distance =read_cm();int Right_Value =digitalRead(RIGHT);int Left_Value =digitalRead(LEFT);Serial.print("R=");Serial.print(Right_Value);Serial.print("L=" );Serial.print(Left_Value);Serial.print(" D=");Serial.println(距离); if((Right_Value==1) &&(distance>=10 &&distance<=30)&&(Left_Value==1)){forword();}else if((Right_Value==0) &&(Left_Value==1) ){turnRight();}else if((Right_Value==1) &&(Left_Value==0)){turnLeft();}else if((Right_Value==1) &&(Left_Value==1)){stop( );}else if(distance> 5 &&distance <10){stop();}else if(distance <5){backword();}delay(50);}long read_cm(){ digitalWrite(trigpin, LOW);延迟微秒(2);数字写入(触发,高);延迟微秒(10);时间 =脉冲输入(回声,高);返回时间 / 29 / 2;}void forword(){// 开启前进Motor1.setSpeed(120);Motor1.run(FORWARD);Motor2.setSpeed(120);Motor2.run(FORWARD);Motor3.setSpeed (120);Motor3.run(FORWARD);Motor4.setSpeed(120);Motor4.run(FORWARD);}void backword(){ // 另一种方式Motor1.setSpeed(120);Motor1.run(BACKWARD); Motor2.setSpeed(120);Motor2.run(BACKWARD);Motor3.setSpeed(120);Motor3.run(BACKWARD); Motor4.setSpeed(120);Motor4.run(BACKWARD); }void turnRight(){ // 另一个 rightMotor1.setSpeed(200);Motor1.run(FORWARD);Motor2.setSpeed(200);Motor2.run(FORWARD);Motor3.setSpeed(100);Motor3.run(BACKWARD) );Motor4.setSpeed(100);Motor4.run(BACKWARD);}void turnLeft(){ // 开启左转Motor1.setSpeed(100);Motor1.run(BACKWARD);Motor2.setSpeed(100);Motor2 .run(BACKWARD);Motor3.setSpeed(200);Motor3.run(FORWARD);Motor4.setSpeed(200);Motor4.run(FORWARD);}void stop(){ // 停止Motor1.setSpeed(0); Motor1.run(RELEASE);Motor2.setSpeed(0);Motor2.run(RELEASE);Motor3.setSpeed(0);Motor3.run(RELEASE);Motor4.setSpeed(0);Motor4.run(RELEASE); }
示意图
制造工艺